
在ROS中,计算图(ROS Compute Graph)是一个核心概念,它描述了ROS节点之间的数据流动和通信方式。它不仅仅是一个通信网络,它也反映了ROS设计哲学的核心——灵活性、模块化和可重用性。通过细致探讨计算图的高级特性和实际应用,我们可以更全面地理解其在机器人软件开发中的重要性。
ROS计算图简介
ROS计算图是ROS架构中的一个关键组成部分,它是由多个处理单元(节点)以及这些单元之间的通信链接(主题、服务和动作)构成的网络。每个节点代表ROS中运行的一个进程,负责处理数据并完成特定的任务,如感知环境、控制机器人部件或执行决策算法。节点之间通过预定义的接口相互通信,这些接口包括:
- 主题(Topics):节点可以发布或订阅主题。发布到主题的消息(Message)对所有订阅了该主题的节点可见,这种通信方式是异步的,支持一对多的数据流。
- 服务(Services):服务允许节点之间进行同步的请求/响应交互。一个节点可以提供一个服务,其他节点可以通过发送请求到这个服务并等待响应来调用它。
- 动作(Actions):动作是一种建立在服务之上的通信方式,用于处理那些需要较长时间完成的任务。它允许任务的执行过程中进行反馈。

高级特性
- 命名空间(Namespaces):ROS允许使用命名空间来组织节点,这样即便是在复杂的系统中,也能保持节点名称的清晰和有序。命名空间的使用使得相同的节点可以在不同的上下文中复用,而不会发生名称冲突。
- 参数服务器(Parameter Server):参数服务器是ROS计算图中的一个关键特性,允许节点存储和共享参数。这些参数可以在运行时被读取和修改,为动态调整节点行为提供了便利。
- 消息过滤(Message Filtering):在某些情况下,节点可能只对特定条件下的消息感兴趣。ROS提供了消息过滤机制,如时间同步过滤器,它允许节点仅在收到多个主题上同步的消息时才进行处理。
工具和可视化
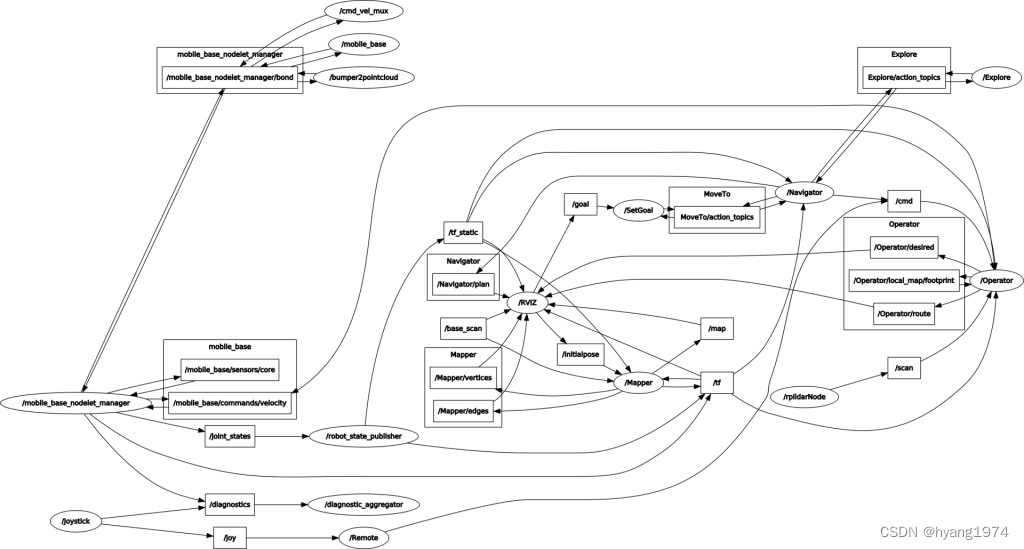
为了帮助开发者理解和调试计算图,ROS提供了一系列工具,它可以可视化节点和节点之间的通信关系。这种可视化表现形式对于检查系统的结构和运行时行为非常有用,特别是在复杂的系统中,能够快速识别通信瓶颈或错误配置。ROS的工具包括rqt_graph, rosbag, dynamic reconfiguration等。
- rqt_graph:这是ROS提供的一个强大工具,能够可视化显示运行中的计算图,包括节点和它们之间的通信。这对于理解系统的整体结构和识别问题至关重要。
- rosbag:ROS还提供了rosbag工具,允许开发者记录和回放消息数据。这在调试系统和算法性能时特别有用,因为开发者可以重复使用真实的输入数据进行测试。
- 动态重配置(Dynamic Reconfigure):这个功能允许运行时更改节点的参数,而无需停止节点。这对于调整算法参数以优化性能或适应不同的环境条件非常有帮助。
实际应用案例
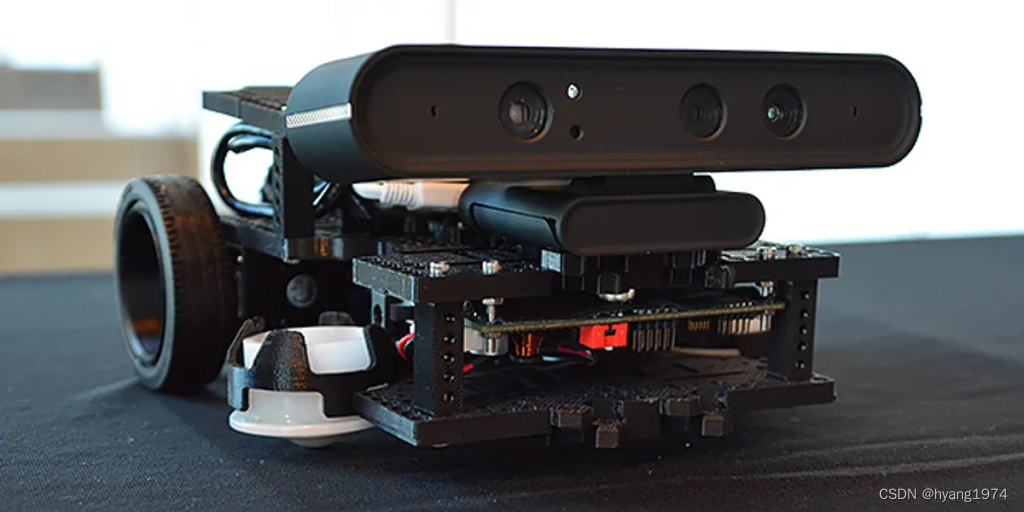
考虑一个自主导航的机器人,它需要感知环境、规划路径并执行移动。在这个系统中:
- 感知:多个传感器节点,如激光雷达(LIDAR)、摄像头等,不断地发布环境数据。这些数据通过主题被传递到处理节点,如用于生成地图的SLAM(Simultaneous Localization and Mapping)算法节点。
- 规划:路径规划节点订阅地图信息和当前位置,然后计算到目标位置的最佳路径。这个节点可能还需要与动态障碍物检测节点通信,以实时调整路径。
- 执行:控制节点接收路径规划节点的输出,通过发送控制命令到驱动器节点(如电机控制器)来移动机器人。同时,这个节点也可能订阅传感器数据,以进行避障。
结论
ROS计算图是ROS架构中不可或缺的一部分,它通过定义清晰的通信接口和数据流动机制,为构建复杂且可靠的机器人应用提供了基础。通过利用ROS丰富的工具集和库,开发者可以有效地开发、测试和部署机器人系统,推动机器人技术的发展和应用。ROS计算图的设计使得机器人系统具有高度的模块化和灵活性。开发者可以独立开发和测试单个节点,然后通过ROS的通信机制将它们组合成一个完整的系统。这种架构不仅有利于团队协作和代码重用,也使得系统能够根据需要轻松地扩展或修改。
作者Blog原文:ROS 2基础概念#1:计算图(Compute Graph)| ROS 2学习笔记 - HY's Blog


)


)
![k8s初始化报错 [ERROR CRI]: container runtime is not running: ......](http://pic.xiahunao.cn/k8s初始化报错 [ERROR CRI]: container runtime is not running: ......)



)








