一,MPU6500功能介绍
1.简介
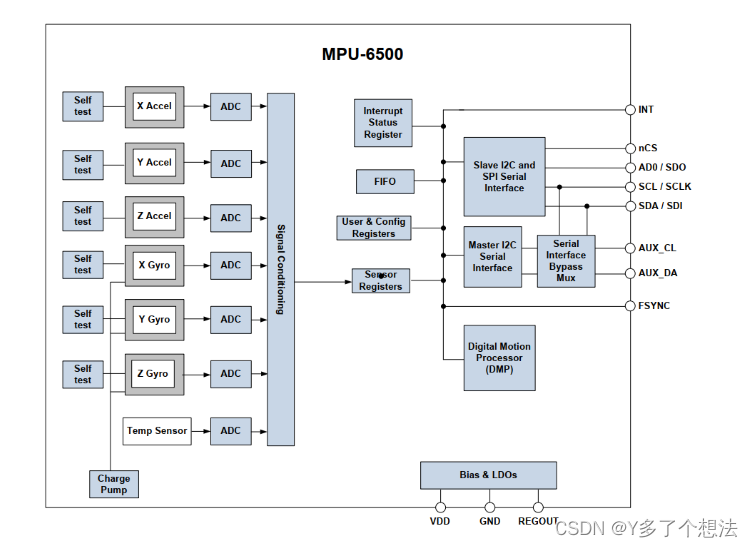
MPU6500是一款由TDK生产的运动/惯性传感器,属于惯性测量设备(IMU)的一种。MPU6500集成了3轴加速度计、3轴陀螺仪和一个板载数字运动处理器(DMP),能够提供6轴的运动数据。这些数据包括加速度和角速度,分别对应于x, y, z轴。
MPU6500的接口类型包括I2C和SPI,支持数字输出。它可以通过I2C或SPI接口与单片机或其他电子设备进行通信,以获取设备的状态和数据。此外,MPU6500还支持SPI通信模式,这使得其在某些应用中更为灵活。
2.性能与应用
性能方面,MPU6500具有较高的功耗效率和较小的封装尺寸,实现了业内领先的消费类陀螺仪性能。它还在加速计噪声、偏置和灵敏度方面进行了重大改进,进一步提升了其实用性和可靠性。
MPU6500被广泛应用于多种应用程序中,如飞控系统、机器人、可穿戴设备等,特别是在需要高精度运动数据的场合。例如,有报道提到,大疆精灵3的飞控IMU就是采用了InvenSense的MPU6500芯片,显示出其在实际应用中的广泛适用性和良好性能。
总的来说,MPU6500是一款功能强大且性价比高的MEMS运动跟踪设备,适用于各种需要精确运动数据的应用场景。
二,dts配置
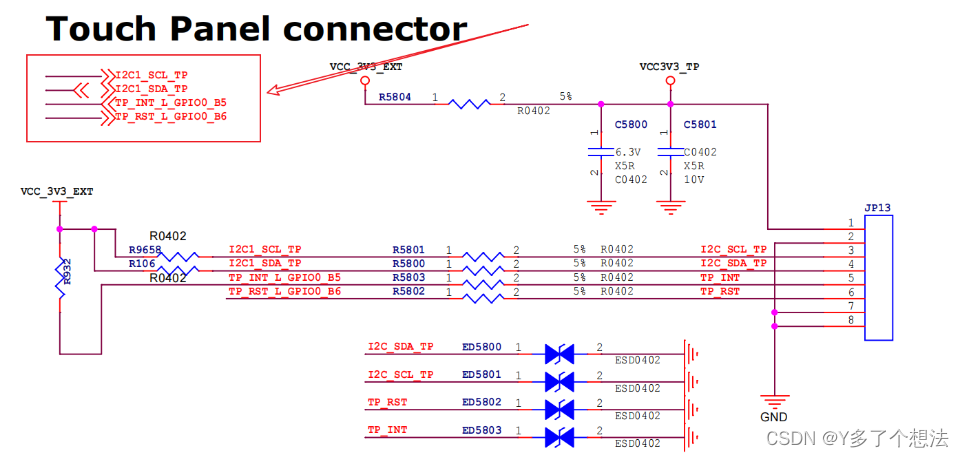
pmu6500通过I2C与CPU连接,使用I2C触摸的接口(VCC,GND,SCL,SDA,INT)。
&i2c1 {status = "okay";mpu6500_acc: mpu_acc@68 {compatible = "mpu6500_acc";// 与mpu6500_acc.c定义匹配reg = <0x68>;irq-gpio = <&gpio0 RK_PB5 IRQ_TYPE_EDGE_RISING>;//中断脚irq_enable = <0>;poll_delay_ms = <30>;type = <SENSOR_TYPE_ACCEL>;//传感器类型layout = <5>;};mpu6500_gyro: mpu_gyro@68 {compatible = "mpu6500_gyro";//与mpu6500_gyro.c定义匹配reg = <0x68>;poll_delay_ms = <30>;type = <SENSOR_TYPE_GYROSCOPE>;//传感器类型layout = <5>;};
};
三,驱动文件配置
1.源程序
kernel/drivers/input/sensors/accel/mpu6500_acc.c
kernel/drivers/input/sensors/gyro/mpu6500_gyro.c
mpu6500_acc.c是g-sensor驱动用来系统转屏,另外一个mpu6500_gyro.c是陀螺仪驱动。
2.内核中加载驱动
CONFIG_MPU6500_ACC=y
CONFIG_GYRO_MPU6500=y
3.内核日志信息
编译内核烧录镜可看到以下打印日志,则说明驱动加载成功并识别到设备。
rk3568:/ # dmesg | grep mpu6500
[ 2.792117] gsensor_mpu6500 1-0068: sensor_register_device: mpu6500_acc, id = 29
[ 2.792143] i2c i2c-1: sensor_probe: mpu6500_acc,00000000271b25e0
[ 2.792190] gsensor_mpu6500 1-0068: sensor_chip_init:mpu6500_acc:devid=0x0,ops=0x000000007868205c
[ 2.988057] gsensor_mpu6500 1-0068: sensor_irq_init:use polling,delay=30 ms
[ 2.988177] gsensor_mpu6500 1-0068: sensor_misc_device_register:miscdevice: mma8452_daemon
[ 2.988188] gsensor_mpu6500 1-0068: sensor_probe:initialized ok,sensor name:mpu6500_acc,type:2,id=29\x0a
[ 5.148660] gyro_mpu6500 1-0068-1: sensor_register_device: mpu6500_gyro, id = 58
[ 5.148676] i2c i2c-1: sensor_probe: mpu6500_gyro,0000000057dfc117
[ 5.148703] gyro_mpu6500 1-0068-1: sensor_chip_init:mpu6500_gyro:devid=0x0,ops=0x000000000c6bf3bd
[ 5.231839] gyro_mpu6500 1-0068-1: sensor_irq_init:use polling,delay=30 ms
[ 5.232065] gyro_mpu6500 1-0068-1: sensor_misc_device_register:miscdevice: gyrosensor
[ 5.232090] gyro_mpu6500 1-0068-1: sensor_probe:initialized ok,sensor name:mpu6500_gyro,type:4,id=58\x0a
[ 26.143380] gsensor_mpu6500 1-0068: set sensor poll time to 66ms
[ 26.227813] gsensor_mpu6500 1-0068: sensor on: starting poll sensor data 62ms四,系统配置
1.Android 中的 sensor 相关宏配置
需要修改Android编译设备配置,添加加速度计和陀螺仪的支持。
BoardConfig.mk中:
BOARD_GRAVITY_SENSOR_SUPPORT := true
BOARD_COMPASS_SENSOR_SUPPORT := false
BOARD_GYROSCOPE_SENSOR_SUPPORT := true
BOARD_PROXIMITY_SENSOR_SUPPORT := false
BOARD_LIGHT_SENSOR_SUPPORT := false
BOARD_PRESSURE_SENSOR_SUPPORT := false
BOARD_TEMPERATURE_SENSOR_SUPPORT := false
BOARD_USB_HOST_SUPPORT := true
支持哪些类型的 sensor,如果没有,要配置成 false,否则 vts 和 cts 测试会失败。
2.启用自动旋转功能,加速度计旋转功能
frameworks/base/core/res/res/values/config.xml:
<bool name="config_supportAutoRotation">true</bool>frameworks/base/packages/SettingsProvider/res/values/defaults.xml:
<bool name="def_accelerometer_rotation">true</bool>
3.编译烧录
编译固件烧录后,正常情况下MPU-6500已经调试完成,进入系统打开设置--显示--自动旋转屏幕,此时转动陀螺仪,系统方向会跟随陀螺仪的方向转动。
加速度和陀螺仪测试:
使用Sensor Sense软件来测试传感器的数据:
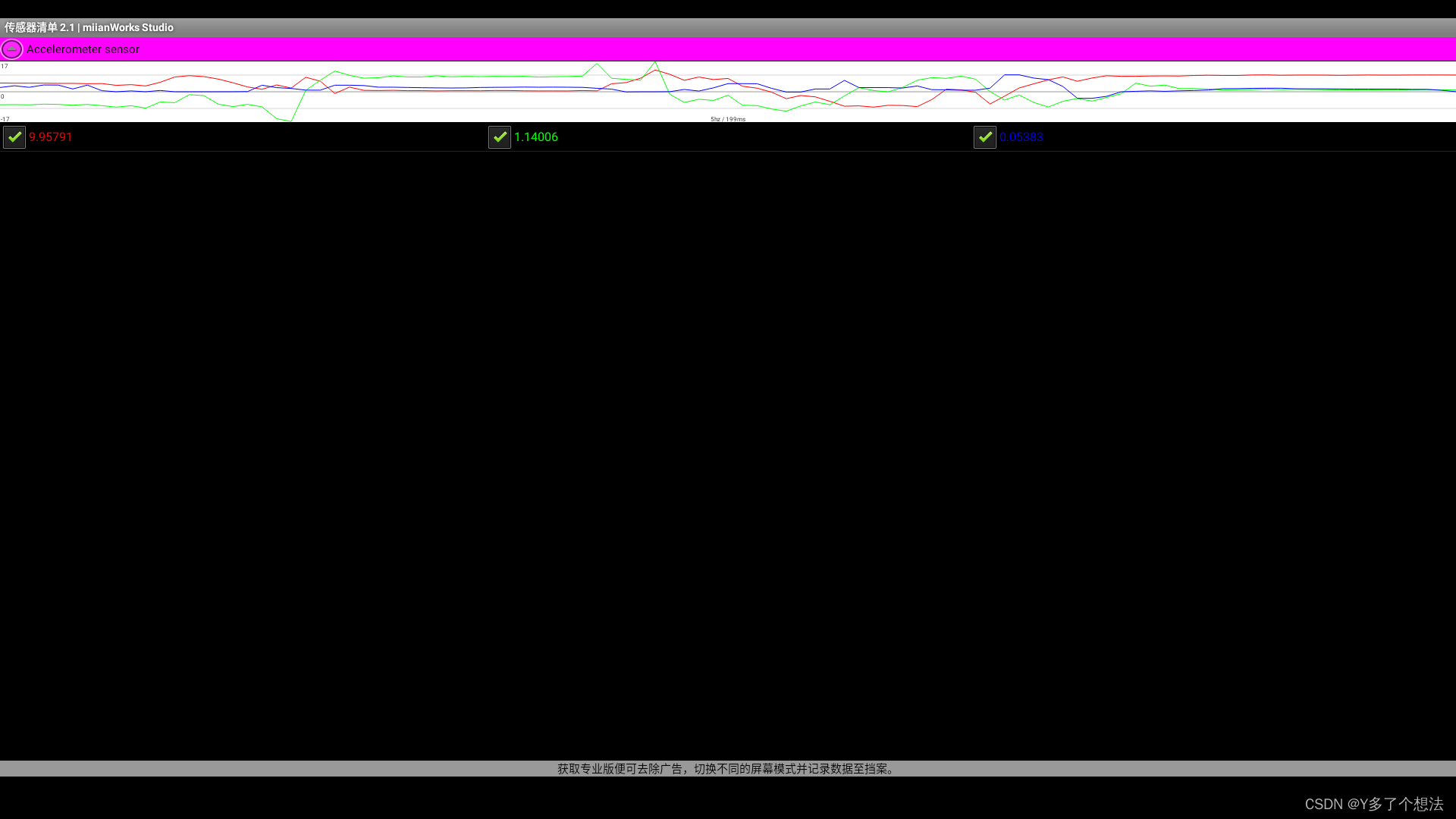
重力变化测试,翻转传感器模块,可看到重力曲线随之变化。
五,调试
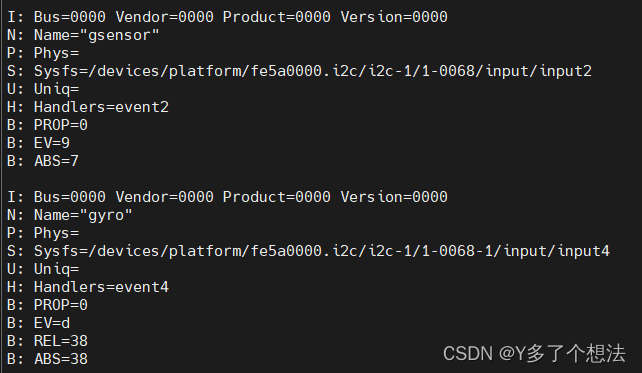
1.查看input设备
cat /proc/bus/input/devices
2.Gsensor 和 gyro 的校准
命令行校准方法,保持机器水平静止放置,输入以下命令校准:
#Gsensor
echo 1 > /sys/class/sensor_class/accel_calibration
#GYRO
echo 1 > /sys/class/sensor_class/gyro_calibration
查看校准值:
cat /sys/class/sensor_class/accel_calibration
cat /sys/class/sensor_class/gyro_calibration
如果无法查看校准值,则说明校准失败,可以打印 kernel log 确定失败原因。校准成功后,校准的值会保存到 nand 或 emmc 的 vendor storage 里面,不会被擦除,开机自动生效。
六,遇到的问题
1.方向不对
理论上x,y,z 3个轴的数据都在± 9.8之间变化。机器完全平放的状态x,y轴接近0,z轴接近9.8。
如果发现方向不对,可以在驱动文件mpu6500_acc.c中交换x,y,z 3个轴的数据。
static int gsensor_report_value(struct i2c_client *client, struct sensor_axis *axis)
{struct sensor_private_data *sensor =(struct sensor_private_data *) i2c_get_clientdata(client);if (sensor->status_cur == SENSOR_ON) {/* Report acceleration sensor information */input_report_abs(sensor->input_dev, ABS_X, axis->x);input_report_abs(sensor->input_dev, ABS_Y, axis->y);input_report_abs(sensor->input_dev, ABS_Z, axis->z);input_sync(sensor->input_dev);}return 0;}
- 这段代码是一个函数gyro_report_value,用于向输入子系统报告陀螺仪(gyroscope)传感器的数值。
函数接受两个参数:一个是指向i2c_client结构的指针client,另一个是指向sensor_axis结构的指针axis,sensor_axis结构可能包含了三轴的数值(x、y、z)。
函数通过i2c_get_clientdata(client)获取与i2c_client结构相关联的私有数据结构sensor_private_data的指针sensor。
函数检查sensor结构中的status_cur字段是否等于SENSOR_ON。如果当前传感器状态为开启状态,就会执行以下操作:
a. 使用input_report_rel函数向输入设备报告陀螺仪的x轴数值,并将其存储在ABS_RX中。
b. 使用input_report_rel函数向输入设备报告陀螺仪的y轴数值,并将其存储在ABS_RY中。
c. 使用input_report_rel函数向输入设备报告陀螺仪的z轴数值,并将其存储在ABS_RZ中。
最后,调用input_sync函数将所有报告的输入事件同步到输入设备。
- 例如要将X轴和Z轴数据对换后再进行input上报,可以在调用input_report_rel函数之前交换axis->x和axis->z的值。
static int gyro_report_value(struct i2c_client *client, struct sensor_axis *axis)
{struct sensor_private_data *sensor = (struct sensor_private_data *)i2c_get_clientdata(client);if (sensor->status_cur == SENSOR_ON) {/* Swap X and Z axis values */int temp = axis->x;axis->x = axis->z;axis->z = temp;/* Report gyro sensor information with swapped X and Z axis values */input_report_rel(sensor->input_dev, ABS_RX, axis->x);input_report_rel(sensor->input_dev, ABS_RY, axis->y);input_report_rel(sensor->input_dev, ABS_RZ, axis->z);input_sync(sensor->input_dev);}return 0;
}
这样就实现了将X轴和Z轴数据对换后再进行input上报的功能。
2.luncher主界面不旋转
在luncher主界面下不能旋转,但在其他应用中可以旋转(比如“资源管理器”“设置”“计算器”)。
可参考如下修改:
$SDK/frameworks/base# git diff
diff --git a/core/res/res/values/config.xml b/core/res/res/values/config.xml
index 970e63b11f37..398e1ea3c6df 100644
--- a/core/res/res/values/config.xml
+++ b/core/res/res/values/config.xml
@@ -570,7 +570,7 @@<!-- If true, the screen can be rotated via the accelerometer in all 4rotations as the default behavior. -->
- <bool name="config_allowAllRotations">false</bool>
+ <bool name="config_allowAllRotations">true</bool><!-- If true, the direction rotation is applied to get to an application's requestedorientation is reversed. Normally, the model is that landscape is






)




)







