1 原理
边缘检测是图像处理和计算机视觉中的基本问题,边缘检测的目的是标识数字图像中亮度变化明显的点。图像属性中的显著变化通常反映了属性的重要事件和变化。边缘的表现形式如下图所示:
图像边缘检测大幅度地减少了数据量,并且剔除了可以认为不相关的信息,保留了图像重要的结构属性。有许多方法用于边缘检测,它们的绝大部分可以划分为两类:基于搜索和基于零穿越。
-
基于搜索:通过寻找图像一阶导数中的最大值来检测边界,然后利用计算结果估计边缘的局部方向,通常采用梯度的方向,并利用此方向找到局部梯度模的最大值,代表算法是Sobel算子和Scharr算子。

-
基于零穿越:通过寻找图像二阶导数零穿越来寻找边界,代表算法是Laplacian算子。

2 Sobel检测算子
Sobel边缘检测算法比较简单,实际应用中效率比canny边缘检测效率要高,但是边缘不如Canny检测的准确,但是很多实际应用的场合,sobel边缘却是首选,Sobel算子是高斯平滑与微分操作的结合体,所以其抗噪声能力很强,用途较多。尤其是效率要求较高,而对细纹理不太关心的时候。
2.1 方法

假设要处理的图像为I,在两个方向求导:
-
水平变化: 将图像I与奇数大小的模版进行卷积,结果为Gx。比如,当模板大小为3时, Gx为:

-
垂直变化: 将图像I与奇数大小的模板进行卷积,结果为Gy。比如,当模板大小为3时, 则Gy为:
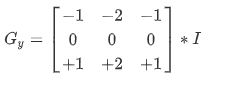
在图像的每一点,结合以上两个结果求出:
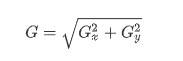
统计极大值所在的位置,就是图像的边缘。
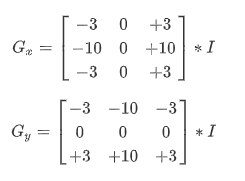
注意:当内核大小为3时, 以上Sobel内核可能产生比较明显的误差, 为解决这一问题,我们使用Scharr函数,但该函数仅作用于大小为3的内核。该函数的运算与Sobel函数一样快,但结果却更加精确,其计算方法为:
2.2 应用
利用OpenCV进行sobel边缘检测的API是:
Sobel_x_or_y = cv2.Sobel(src, ddepth, dx, dy, dst, ksize, scale, delta, borderType)参数:
-
src:传入的图像
-
ddepth: 图像的深度
-
dx和dy: 指求导的阶数,0表示这个方向上没有求导,取值为0、1。
-
ksize: 是Sobel算子的大小,即卷积核的大小,必须为奇数1、3、5、7,默认为3。
注意:如果ksize=-1,就演变成为3x3的Scharr算子。
-
scale:缩放导数的比例常数,默认情况为没有伸缩系数。
-
borderType:图像边界的模式,默认值为cv2.BORDER_DEFAULT。
Sobel函数求完导数后会有负值,还有会大于255的值。而原图像是uint8,即8位无符号数,所以Sobel建立的图像位数不够,会有截断。因此要使用16位有符号的数据类型,即cv2.CV_16S。
处理完图像后,再使用cv2.convertScaleAbs()函数将其转回原来的uint8格式,否则图像无法显示。
Sobel算子是在两个方向计算的,最后还需要用cv2.addWeighted( )函数将其组合起来
Scale_abs = cv2.convertScaleAbs(x) # 格式转换函数
result = cv2.addWeighted(src1, alpha, src2, beta) # 图像混合示例:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 读取图像
img = cv.imread('./image/horse.jpg',0)
# 2 计算Sobel卷积结果
x = cv.Sobel(img, cv.CV_16S, 1, 0)
y = cv.Sobel(img, cv.CV_16S, 0, 1)
# 3 将数据进行转换
Scale_absX = cv.convertScaleAbs(x) # convert 转换 scale 缩放
Scale_absY = cv.convertScaleAbs(y)
# 4 结果合成
result = cv.addWeighted(Scale_absX, 0.5, Scale_absY, 0.5, 0)
# 5 图像显示
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img,cmap=plt.cm.gray),plt.title('原图')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(result,cmap = plt.cm.gray),plt.title('Sobel滤波后结果')
plt.xticks([]), plt.yticks([])
plt.show()
将上述代码中计算sobel算子的部分中将ksize设为-1,就是利用Scharr进行边缘检测。
x = cv.Sobel(img, cv.CV_16S, 1, 0, ksize = -1)
y = cv.Sobel(img, cv.CV_16S, 0, 1, ksize = -1)
3 Laplacian算子
Laplacian是利用二阶导数来检测边缘 。 因为图像是二维 , 我们需要在两个方向求导,如下式所示:
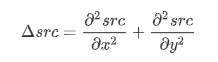
那不连续函数的二阶导数是:
![]()
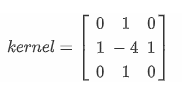
那使用的卷积核是:
API:
laplacian = cv2.Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]])参数:
-
Src: 需要处理的图像,
-
Ddepth: 图像的深度,-1表示采用的是原图像相同的深度,目标图像的深度必须大于等于原图像的深度;
-
ksize:算子的大小,即卷积核的大小,必须为1,3,5,7。
示例:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 读取图像
img = cv.imread('./image/horse.jpg',0)
# 2 laplacian转换
result = cv.Laplacian(img,cv.CV_16S)
Scale_abs = cv.convertScaleAbs(result)
# 3 图像展示
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img,cmap=plt.cm.gray),plt.title('原图')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(Scale_abs,cmap = plt.cm.gray),plt.title('Laplacian检测后结果')
plt.xticks([]), plt.yticks([])
plt.show()
4 Canny边缘检测
Canny 边缘检测算法是一种非常流行的边缘检测算法,是 John F. Canny 于 1986年提出的,被认为是最优的边缘检测算法。
4.1 原理
Canny边缘检测算法是由4步构成,分别介绍如下:
-
第一步:噪声去除
由于边缘检测很容易受到噪声的影响,所以首先使用$5*5$高斯滤波器去除噪声,在图像平滑那一章节中已经介绍过。
-
第二步:计算图像梯度
对平滑后的图像使用 Sobel 算子计算水平方向和竖直方向的一阶导数(Gx 和 Gy)。根据得到的这两幅梯度图(Gx 和 Gy)找到边界的梯度和方向,公式如下:
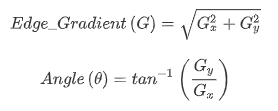
如果某个像素点是边缘,则其梯度方向总是垂直与边缘垂直。梯度方向被归为四类:垂直,水平,和两个对角线方向。
-
第三步:非极大值抑制
在获得梯度的方向和大小之后,对整幅图像进行扫描,去除那些非边界上的点。对每一个像素进行检查,看这个点的梯度是不是周围具有相同梯度方向的点中最大的。如下图所示:

A点位于图像的边缘,在其梯度变化方向,选择像素点B和C,用来检验A点的梯度是否为极大值,若为极大值,则进行保留,否则A点被抑制,最终的结果是具有“细边”的二进制图像。
-
第四步:滞后阈值
现在要确定真正的边界。 我们设置两个阈值: minVal 和 maxVal。 当图像的灰度梯度高于 maxVal 时被认为是真的边界, 低于 minVal 的边界会被抛弃。如果介于两者之间的话,就要看这个点是否与某个被确定为真正的边界点相连,如果是就认为它也是边界点,如果不是就抛弃。如下图:
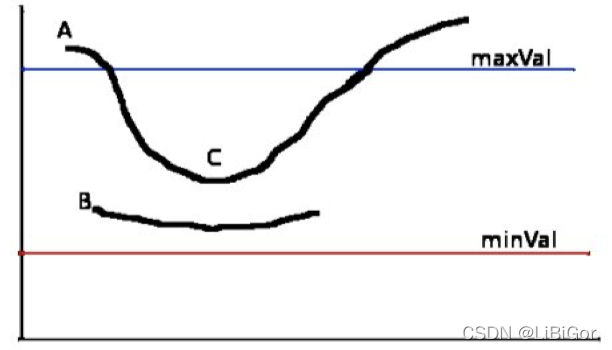
如上图所示,A 高于阈值 maxVal 所以是真正的边界点,C 虽然低于 maxVal 但高于 minVal 并且与 A 相连,所以也被认为是真正的边界点。而 B 就会被抛弃,因为低于 maxVal 而且不与真正的边界点相连。所以选择合适的 maxVal 和 minVal 对于能否得到好的结果非常重要。
4.2 应用
在OpenCV中要实现Canny检测使用的API:
canny = cv2.Canny(image, threshold1, threshold2) 参数:
-
image:灰度图,
-
threshold1: minval,较小的阈值将间断的边缘连接起来
-
threshold2: maxval,较大的阈值检测图像中明显的边缘
示例:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 图像读取
img = cv.imread('./image/horse.jpg',0)
# 2 Canny边缘检测
lowThreshold = 0
max_lowThreshold = 100
canny = cv.Canny(img, lowThreshold, max_lowThreshold)
# 3 图像展示
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img,cmap=plt.cm.gray),plt.title('原图')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(canny,cmap = plt.cm.gray),plt.title('Canny检测后结果')
plt.xticks([]), plt.yticks([])
plt.show()
总结
-
边缘检测的原理
-
基于搜索:利用一阶导数的最大值获取边界
-
基于零穿越:利用二阶导数为0获取边界
-
-
Sobel算子
基于搜索的方法获取边界
cv.sobel()
cv.convertScaleAbs()
cv.addweights()
-
Laplacian算子
基于零穿越获取边界
cv.Laplacian()
-
Canny算法
流程:
-
噪声去除:高斯滤波
-
计算图像梯度:sobel算子,计算梯度大小和方向
-
非极大值抑制:利用梯度方向像素来判断当前像素是否为边界点
-
滞后阈值:设置两个阈值,确定最终的边界
-
5 算子比较



)













+分水岭算法+GraphCut+GrabCut)


