概念
工具坐标系是把机器人腕部法兰盘所握工具的有效方向定为Z轴,把坐标定义在工具尖端点,所以工具坐标的方向随腕部的移动而发生变化。
工具坐标的移动,以工具的有效方向为基准,与机器人的位置、姿势无关,所以进行相对于工件不改变工具姿势的平行移动操作时最为适宜。
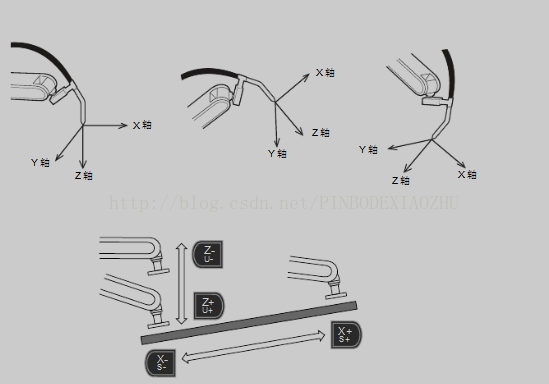
建立了工具坐标系后,机器人的控制点也转移到了工具的尖端点上,这样示教时可以利用控制点不变的操作方便地调整工具姿态,并可使插补运算时轨迹更为精确。所以,不管是什么机型的机器人,用于什么用途,只要安装的工具有个尖端,在示教程序前务必要准确地建立工具坐标系。
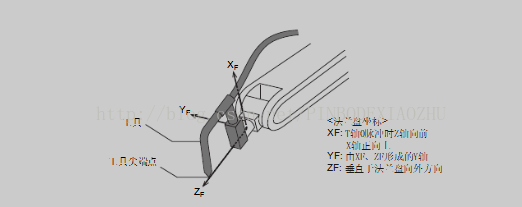
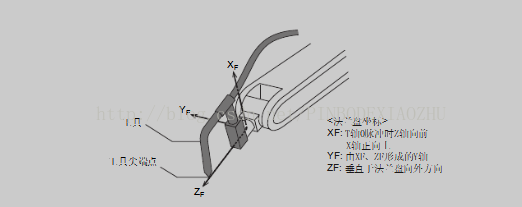
位置数据
位置数据是指工具尖端点在法兰盘坐标系下的坐标值。
位置数据的创建方法有两种。
1 直接输入法(不推荐使用)
如果已知工具的具体尺寸,可直接输入具体数值。
2 工具校验(常用)
进行工具校验,需以控制点为基准示教5个不同的姿态(TC1至 5)。根据这5个数据自动算出工具尺寸。应把各点的姿态设定为任意方向的姿态。若采用偏向某一方向的姿态,可能出现精度不准的情况。
)



)


测试工具http_load、webbench、ab、Siege、autobench简单使用教程(转)...)
)



)



![[SceneKit专题]11-Reference-Nodes引用节点](http://pic.xiahunao.cn/[SceneKit专题]11-Reference-Nodes引用节点)


