
来源:张国斌
中国有堪称全球最复杂的路况,例如上图是去年投入使用的重庆黄桷湾立交桥上下共5层,共20条匝道,堪称中国最复杂立交桥之最,据称走错一个路口要在这里一日游,这样的立交桥如果让谷歌无人驾驶车上去可以绕出来吗?
我不相信,依靠现有的技术与,Waymo的车一定绕不出来,前几天,谷歌Waymo CEO克拉克(John Krafcik)在接受媒体采访时终于说实话了,他坦诚L5级自动驾驶不可能实现 甚至没必要!并说这个L5要实现太难了!太难了!所以,全球汽车业是不是都被谷歌带到沟里去了?要知道,谷歌是一家互联网公司,它可是不做产品的 ,曾经它的谷歌眼镜就把很多人带沟里,老张我看这回自动驾驶又带大家掉坑里了!哦,本土不是也有一些互联网公司号称造成L5自动驾驶车了吗?那就去那个立交桥上跑一圈遛遛看能出来不。
其实原因很简单,目前的道路交通系统都是给人类驾驶员准备的,要给自动驾驶车用必须构建一个新的交通系统。
与传统汽车发展路线不同,在即将到到来的智能驾驶时代,中国可能会构建一个不同于欧美但更适合自己国情的发展自动驾驶交通框架,想要进入中国智能驾驶领域的公司如果不了解这个方向,那可能真是把大把的钱扔进坑里连响都听不到!所以,搞自动驾驶的朋友请看过来。
提起未来智能汽车,很多人想到的是谷歌的自动驾车,特斯拉、百度等公司号称L4层级的智能车,但由于中国有特殊的行车场景和驾驶习惯,所以中国在这个技术上可能并不会跟随欧美的路子(尤其近日中美贸易战),反而会构建一个适合中国国情的智能交通与智能驾驶大框架系统,进而形成中国特色的智慧城市交通系统。
在今年7月芯原微电子主办的主题是自动驾驶的青城山中国IC生态高峰论坛上,很多嘉宾谈到了中国在构建的智能驾驶系统。工信部电子信息司系统处处长杨旭东博士强调汽车电子一个重要的方向是汽车智能化,智能化不仅将带来汽车产品形态的根本变化,更颠覆传统汽车技术体系和产业格局,也还将引发消费者出行和生活方式的变革,信息技术和通讯方式的变革,信息和交通基础设施的变革,甚至将极大的加速人类文明的进程。
他透露工信部电子信息司目前在围绕构建汽车智能计算架构这一核心任务,综合考虑计算通信控制安全服务等多任务需求,研究制订汽车智能计算架构的总框架,技术路线和标准体系,推动电子系统协同控制技术,高带宽信息通讯技术等关键技术,和高端传感器、智能芯片控制器的产品研发,形成产业生态体系,建设三类平台,积极推动建设共性技术创新平台,关键技术验证测试平台和智能汽车应用示范服务平台。
“我们要充分发挥大国大市场的优势,以我为主,为我所用,面向中国大众的智能汽车和智慧出行消费需求,提升国内企业的技术研发势力、市场引领能力和生态构建能力,与此同时我们还将积极做好顶层设计工作,加强对智能汽车、智慧交通、车联网发展的研究,编制汽车智能计算架构,以及汽车电子发展的相关指导性文件。”他强调。
一、中国智能驾驶系统的顶层设计

中国工程院院士、中国智能网联汽车产业技术联盟理事长、清华大学汽车工程系教授李骏则全面介绍了中国智能驾驶系统的的顶层设计。他在发言中指出:“今天出席这个会的身份是以中国智能网联汽车产业技术联盟理事长的身份来的,大家知道中国智能网联汽车产业联盟是由工信部指导的,2013年苗部长亲自揭牌知道的,是目前行业上最大的组织,而且是非常专业化的。虽然智能汽车有很多叫法,但是最终我们还是选择了ICV(智能网联汽车),现在看选得还是比较正确的。”
他指出未来汽车发展是四个方向就是“四化”:第一个叫绿色低碳化,所谓新能源汽车就是这个,我们签了巴黎协定,对二氧化碳做了承诺,对环保方面可谓是超级世界环保法规所以这个是最重要的方向。
第二个就是信息互联化。第三个方向就是智能驾驶,就是方向盘的革命。如果是新能源是智能网联是方向盘的革命。
第四个是共享化。
这个四化都跟汽车电子密切相关,总的来说在行业里可以分成两部分,一部分叫车载电子,一部分叫车控电子。绿色低碳化带来了新能源汽车的三电,电池、电机、整车控制。信息化带来了更加复杂的车载信息这样的电子。
智能网联需要更大的计算平台,共享就是结合在一起。
“这就是我今天想跟大家分享的叫中国的智慧城市、智能交通、智慧汽车未来重要发展方向。以及这个发展方向中的发展战略、系统架构和市场应用。”他强调。
第一部分:中国标准的ICV发展战略

中国发展智能网联汽车它的愿景和使命是什么?就是如上所示。
从当前汽车所面临最大的问题,一个是交通死亡事故,还有一个就是堵塞,还有急事找车难停车难,这样的问题导向就是要产生四个当前汽车所没有的新的产品,这四个产品是什么呢?第一个就是智能安全驾驶的汽车,它的愿景就是零死亡,少伤害。第二个就是高效移动汽车。第三个就是智能共享汽车,目前中国千人拥车率是155辆,远远低于联合国的600,但很多城市都开始限购了,我希望成都永远不限购,但可能做不到。“我们开车是一种幸福,如果一辈子不幸运不走运抽不上号,那你的人生幸福就体现不了,那怎么办呢?就得靠未来的共享。”他指出。
最后一个就是智能汽车云管理系统,未来这个云管理系统是未来的发展市场方向。

他指出:未来中国标准的ICV是有一个战略的,这个战略是中国标准,这个就是中国的场景,中国的地图,中国的交通,中国的通讯和安全。这五个支柱下我们需要两个生态,一个是智慧城市生态,不能让车非常聪明,路很糟糕,环境很拥堵,另一个就是中国新一代的信息交通,叫智能驾驶。

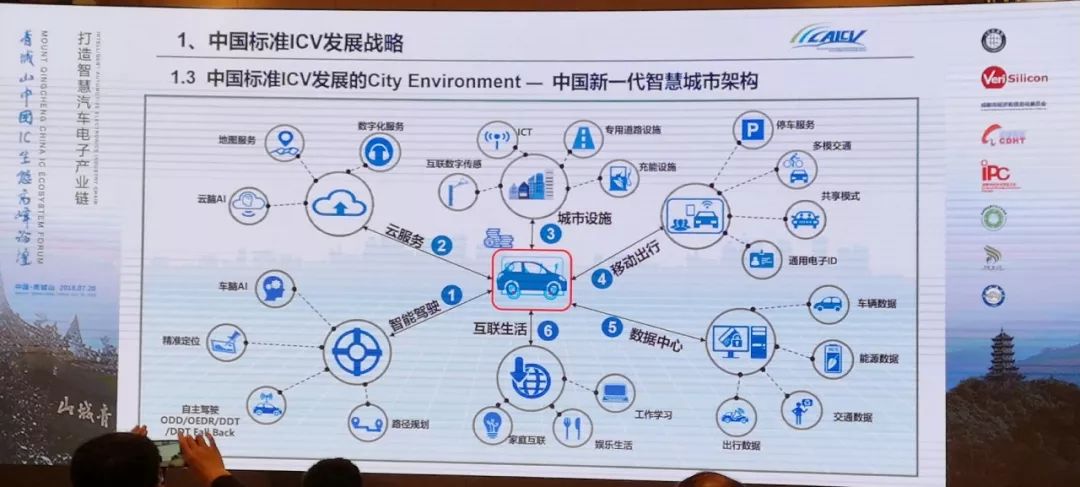
中国新一代的智慧城市架构就是把这六个大的元素联合在一起跟车紧密相联,现在的车是一个孤岛,未来的车就不能再做一个信息孤岛了。

未来智慧城市就是这样一个方向,现在欧洲、美国都在打造具有深度融合、综合信息管理系统,所以未来的城市结合这样的一个工业技术,会有相当大的变化。而我们国家的智慧城市发展是非常迅速的。

另外一个就是必须有新一代的智慧交通的架构,这是跟华为一起研究推进的,我们认为未来可能有三层架构,服务的架构、设施的架构和路边的架构。在架构上我们有许多创新。

上图就是欧盟它现在打造的这种架构,它包括服务、战略、战术和操控的架构,跟中国构思的是非常类似的。

最终重中之重的是要把城市交通和汽车融合,这种融合体现就是要依靠互联网、大数据、人工智能这种云平台,与汽车充分的进行信息物理融合,产生这种智慧城市、智能交通、智能汽车,就说我现在大家推进的,现在这个业界也非常接受的,就是SCSTSV,类似美国奥斯汀的智能交通架构。
二、SCSTSV的系统架构

他指出未来智能汽车重要场景就是高速公路Highway,城市中心地带或者卫星城Urban地区等,但是中国人的驾驶习惯和国外有很大不同,因此中国搞智能汽车是比国外要复杂得多。
基于这样的背景,中国需要考虑自己的新架构,这样才能解决非常复杂的交通场景。另外,通过新架构来要规范驾驶,中国很多司机喜欢超车、随意变线等,这样很危险,希望在智能网联汽车时代可以规范这样的驾驶行为。
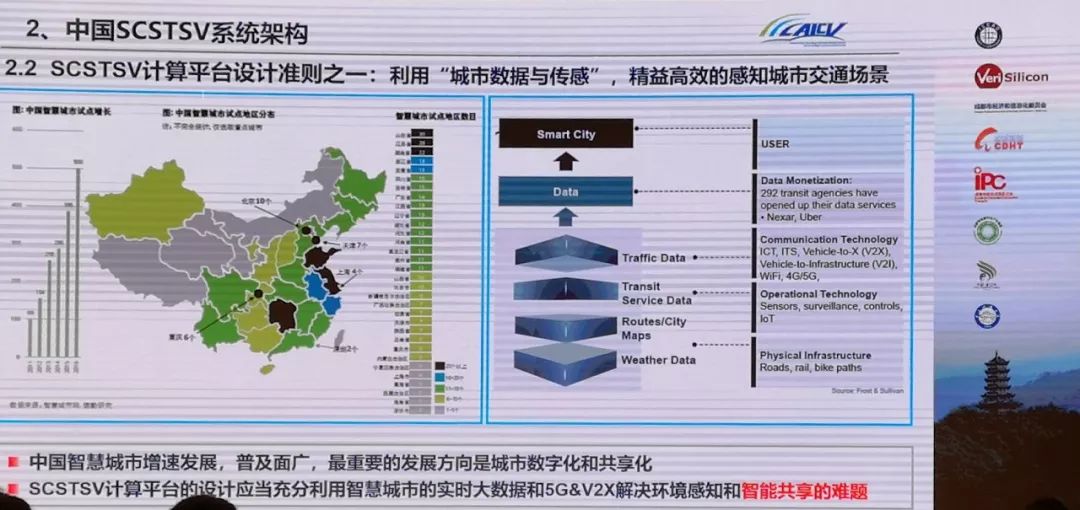
这样的架构有若干个设计原则,这里抛出三个。第一个重要性原则,就是要依靠城市数据和城市传感,不能什么东西都放在车身,什么叫城市数据,这个图给出了城市数据,特别是城市在物流、地图、天气,特别是跟天气有非常大的关系数据。 我们国家智慧城市发展非常快,在2011年只有99个城市,到2017年已经发展到555个!城市的基础架构对智能汽车帮助很大,这样我们可以搞一个创新设计,基于城市数据和城市传感这样的计算平台架构,把SC作为传感期设计进来,再把ST作为传感器设计进来,在包括车上的传感器SV,这样的话我们就会得到新的计算平台的架构。
第二个非常重要的是我们搞智能汽车有三个目的。一个是智能汽车达到安全性,这个是美国DOT在2016年公布美国交通部公布的数据显示交通事故的94%是由人驾驶所造成的,因此必须解决这种安全性问题。

但是智能汽车出现了之后,它出现了一种新的不安全性,就是不可知的不安全性,类似今年特斯拉、Uber发生的事故,这个车并没有坏都是正常的,但把人撞死了。这个国际上叫做预期功能性安全问题(SOTIF)。


这种SOTIF在平台上怎么解决?目前我们整体计算平台架构就是三层:环境感知、定位规划和决策控制。未来应该建立四层架构,当环境感知、定位规划告警的时候不能立即开车,我们人开车遇到风险的时候还要按喇叭,还要打双闪,智能汽车怎么弄呢?所以它需要一个机制,需要对于这个周围的环境进行互联和警示,然后才能驾驶。中国要根据自己的特色去做,不能完全采取通常的这种架构。

第三个非常重要的原则,就是设计敏感性,国际上叫RSS,必须跟周围保持规范的距离。另外非常重要的就是不能因为你避免一个事故而产生另一个事故,这种驾驶的规范性,特别是当你的驾驶存在着遮挡性的时候,你必须谨慎驾驶。
这在设计上怎么办?这就是需要在设计上,不光有智商强大,互相之间比cut in ,cut off,我们还必须有情商。情商就是对于行为控制的能力,同时我们还需要有逆情商,就是当你做不了的时候必须很文明的保持你的规范性。

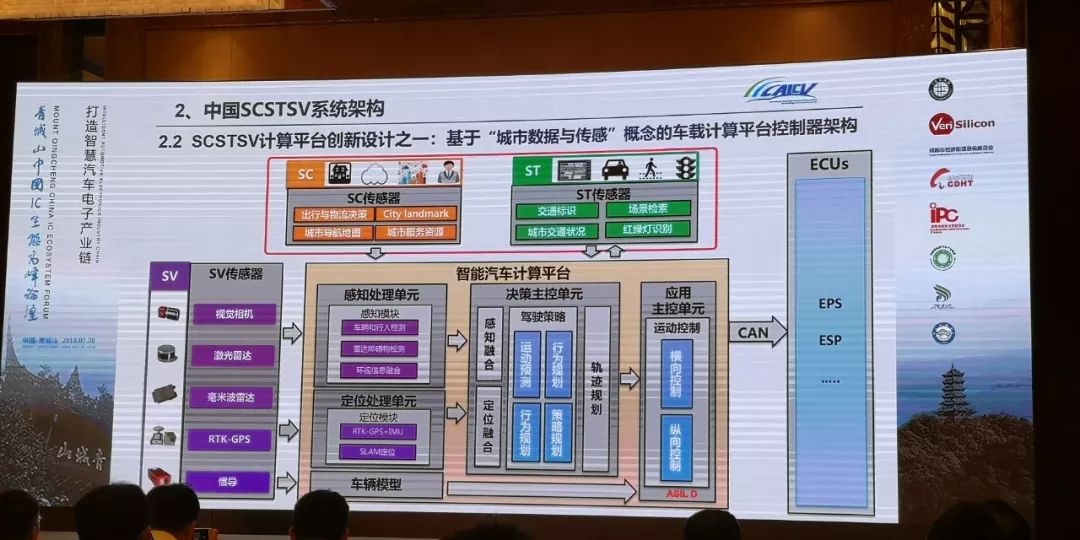
这样的话就会得到基于精益高效、安全可靠和适应中国城市交通场景的SCSTSV的架构,这个架构包括了情商智商理念。

“在这样的架构下会规划控制器的架构,在新的控制器架构里,就可以勾画芯片架构,这种芯片架构的特点就是因为借助了城市的数据和传感,可以减轻在汽车上GPU的超级计算,可以降低成本。这个是我觉得未来是希望汽车界和半导体界能够相互进行研讨和切磋的。”他指出。

他表示中国汽车工程协会去年和滴滴做了一个市场调查,调查了全国大城市出行趋势,得出三个结论:
第一个非常重要的结论,就是中国未来共享出行会成增加的趋势,希望共享的原因有11个,这11个中有4个是非常重要,一个是不开车可以节省时间和精力。
第二个是出行便捷灵活。
第三个是降低出行成本。
第四个是停车没有顾虑。
从上图的曲线来看,2013年到2017年汽车共享出行的里程从1.4%增加到18%,私家车出行从20%减少到3.8%,所以未来共享出行将是一个非常重要的方式。在共享出行中能够接受新能源汽车的比例非常大,达到了60%,能够接受智能化的程度达到了83.1%,特别是对于人工智能、共享出行、无人驾驶都非常热爱。

另一个是中国汽车工业协会和德勤我们合作研究中国智慧城市的发展,未来中国智慧城市会有六个大的方向,其中最主要的就是智能出行,智能出行就是共享出行、智能驾驶、动态定价、物联网、高级的分析能力使得人与物能够更快更安全更经济更便捷的,这是未来非常重要的趋势。

还有一个很重要的,就是大家熟悉的雄安,雄安现在在规划一个非常重要的城市,就是要搞智慧城市,智能交通,智能汽车。雄安绿色交通体系已经规范了智能共享出行比例和私家车的出行比例,它规划的私家车出行的比例更少,更多的是鼓励市民去用智能共享汽车。为此它把智能交通,城市空间的组织,就类似新加坡上下两层,智能技术、智能运载工具都布局在雄安里,产生雄安模式,雄安场景,雄安技术和雄安路线。“我觉得如果这个雄安市成功的话,对中国其他智慧城市是一个非常大的复制作用。”他表示。
三、结论

最后,从世界范围来看,欧洲提出了这样的口号:汽车改变我们的城市生活,L4L3首先是在一些特定区域实现。
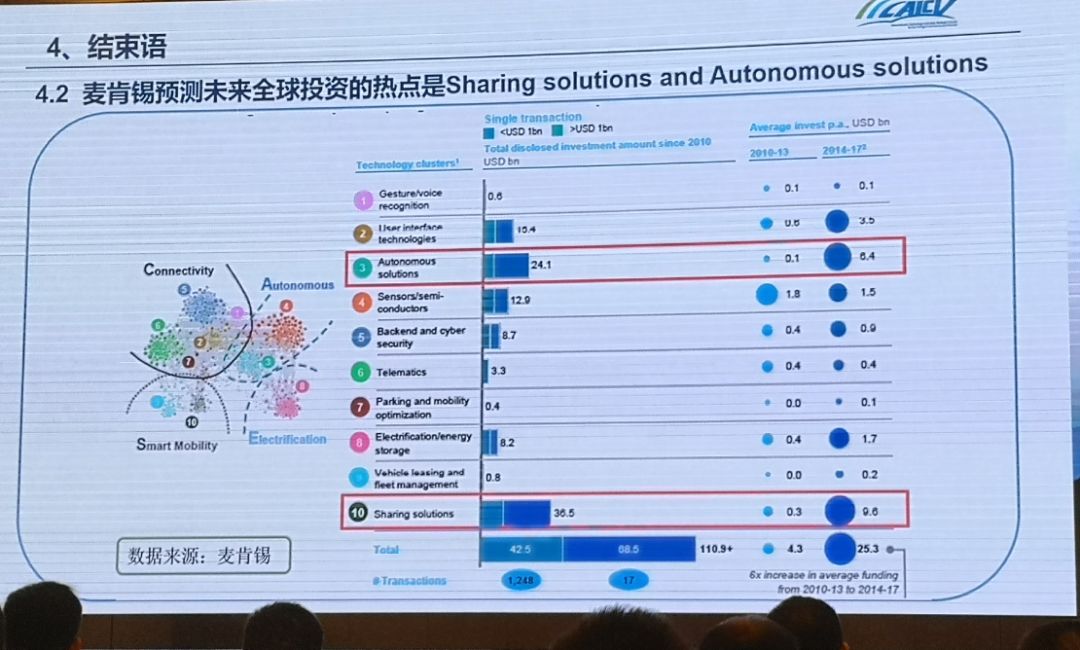
第二看看麦肯锡的全球投资热点分析,未来在汽车上有四个大的投资领域,在这四个大的领域中有10个投资具体的投资点,在具体投资点中3和10,就是自动驾驶解决方案和共享解决方案。

最后他谈到芯片路线图,目前世界上有三种路线图,一个是英伟达的DRIVE PX 2 平台,DRIVE PX 2 是一个开放式人工智能车辆计算平台,对于车厂和一级供应商来说,可以根据这个平台做快速的、自主定制化的自动驾驶车辆研发。它提供三个功能递进的平台,分别是 AUTOCRUISE、AUTOCHAUFFEUR 和 FULLY AUTONOMOUS DRIVING(全自动驾驶)。
一个是zFAS(中央驾驶辅助控制系统)路线;
还有一个是EOCM模块,他指出汽车工业协会比较倾向于这一种路线图。

最后他分享了三个重要结论 一个是与中国新一代智慧城市智能交通深度融合的中国ICV这样的发展战略是一个正确的选择,第二个智慧城市智能交通智能汽车这样的产品是一个探索性的有中国特色的创新产品。第三个是中国未来智慧城市发展,80%的汽车还是在城市里,可为这种产品是提供了广泛的应用场景。
四、编后记
最近经常跟华登国际的金总等产业人士交流自动驾驶,我的感触是,关于自动驾驶确实是要根据中国的国情来发展,谷歌为什么搞自动驾驶?是因为美国司机收入高,一个纽约的出租出司机一个月收入1万美元, 美国巴士司机平均年薪是3万美元,美国货车司机平均收入7.3万美元,美国发展自动驾驶是要用自动驾驶汽车取代这些司机,而中国呢,司机收入远低于他们,所以国情很大不同。
基于以上的分析,大家可以想想未来自动驾驶汽车市场到底有多大?值得那么多公司挤破头进入吗?老张我看很多公司挤破头进去其实是为了融资,真正的产品能卖出去吗?就像国内某些号称搞汽车AI芯片的公司,其芯片让传统车厂嗤之以鼻,他们说:“我的汽车数据比你多多少倍,我不能自己开一款汽车AI芯片吗?我凭什么用你的?”所以,不用想就知道它的芯片能不能卖出去了。
本来这篇文章该7月写的,但是当时想是不是该给自动驾驶泼泼冷水,所以就搁置了,现在谷歌的Waymo老大都自己说L5难以实现了,可见他们确实遇到了很大的麻烦,而且这个坑越挖越大,估计谷歌都怕了,所以搞自动驾驶的弟兄们是该冷静想想了,最起码,你们要仔细看看李院士的演讲,看看中国是怎么规划的,围绕中国这个顶层设计来搞智能驾驶,否则,最后 ,,,,一定是死路一条。
这里是李院士的演讲视频
未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”




















)