项目简介
汽车的日益普及在给人们带来极大便利的同时,也导致了拥堵的交通路况,以及更为频发的交通事故。而自动驾驶技术的出现可以有效的缓解了此类问题,减少交通事故,提升出行效率。
国内外检测车道线的方法主要有两类:一类是基于模型的检测方法,还有一类是基于特征的检测方法。
基于模型的检测方法是将车道赋予一种合适的数学模型,并基于该模型对车道线进行拟合,原理就是在结构化的道路上根据车道线的几何特征为车道线匹配合适的曲线模型,在采用最小二乘法,Hough变换等方法对车道线进行拟合。常用的数学模型有直线型、抛物线模型以及样条曲线模型。这种方法对噪声抗干扰能力强。但也存在弊端,即一种车道线模型不能同时适应多种道路场景。
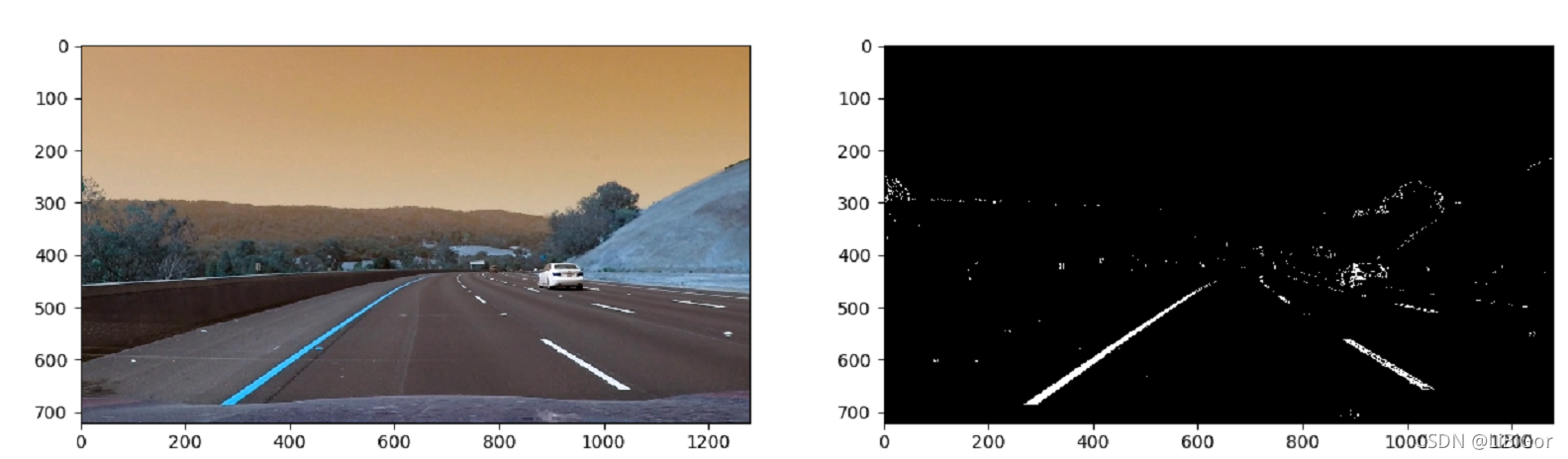
基于特征的检测方法是根据车道线自身的特征信息,通过边缘检测或者阈值分割将车道线的特征信息从路面区域中提取出来。该方法对车道线的边缘特征要求较高,在边缘特征明显的情况下可获得较好的结果,但对噪声很敏感,鲁棒性较差。
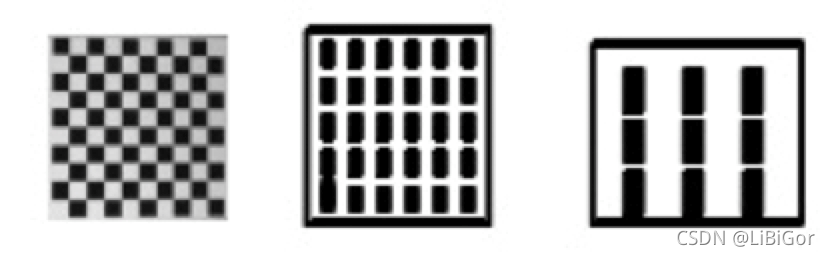
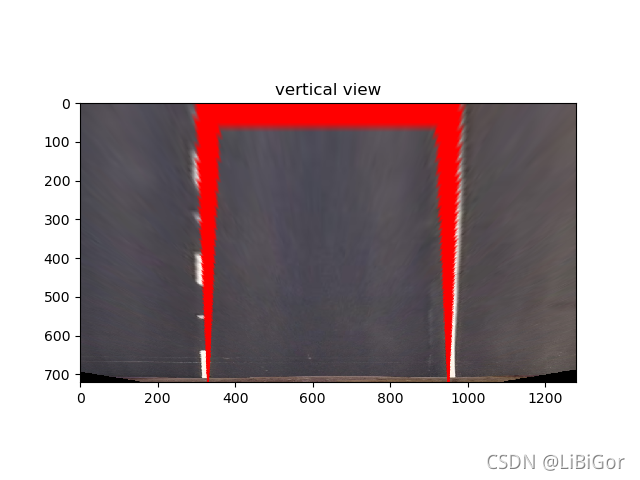
本项目针对车载相机获得的道路图像进行提取,主要是对图像进行校正,利用边缘提取和颜色阈值的方法提取车道线,利用透视变换将图像转换为鸟瞰图,利用直方图统计的方法确定左右车道位置,并利用最小二乘法拟合车道线,并利用透视变换将检测结果绘制在图像上,最后计算车道线的曲率及车辆偏离车道中央的距离。流程如下图所示:
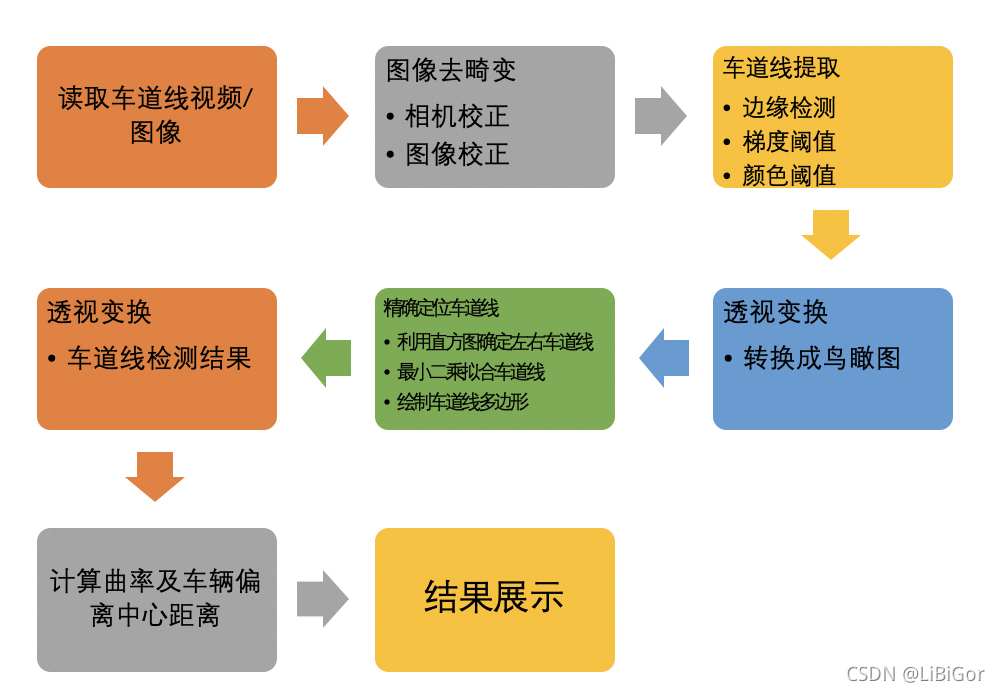
截图: