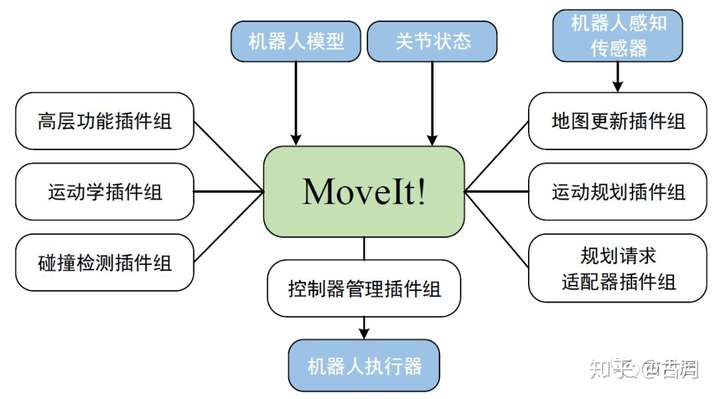
MoveIt!是ROS中一个重要的集成化开发平台,由一系列移动操作的功能包组成,提供运动规划、操作控制、3D感知、运动学等功能模块,是ROS社区中使用度排名前三的功能包,目前已经支持众多机器人硬件平台。
MoveIt!中的众多功能都使用插件机制集成,其中有一个重要的功能模块——运动学插件。
今天我们就来聊下MoveIt!中的运动学求解器。
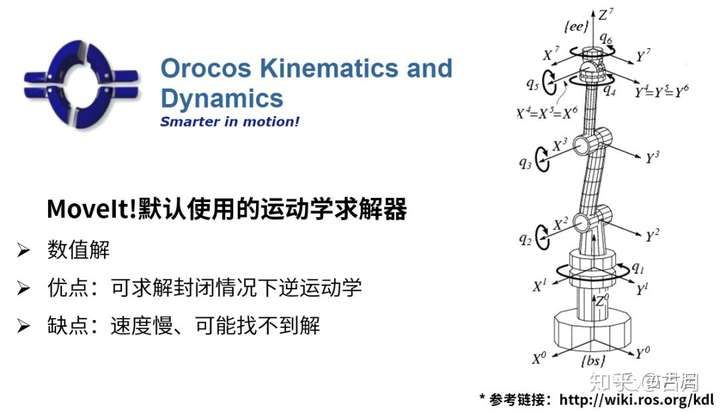
一、KDL
Kinematics and Dynamics Library (KDL)是MoveIt!中的默认运动学插件,在使用MoveIt! Setup Assistant进行模型配置时,可以进行配置。

配置完成后,就可以运行demo.launch控制虚拟机械臂进行运动规划了。但是KDL有自己的优缺点:
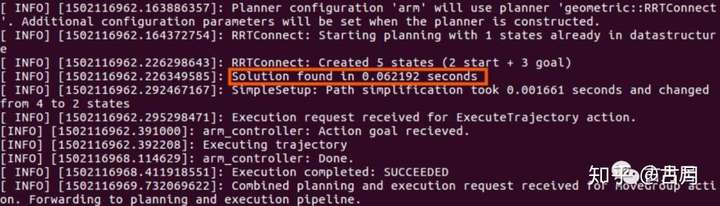
比如一次逆解的求解时间:0.062192秒。。。
很多时候我们在做运动规划的时候,MoveIt!经常会提示规划失败、求解失败等错误,很多都是因为KDL这款运动学插件导致的,那么问题就来了——能不能更换一个运动学插件?
当然可以,以下介绍两个用的最多的运动学插件:TRAC-IK和IKFAST。
二、TRAC-IK
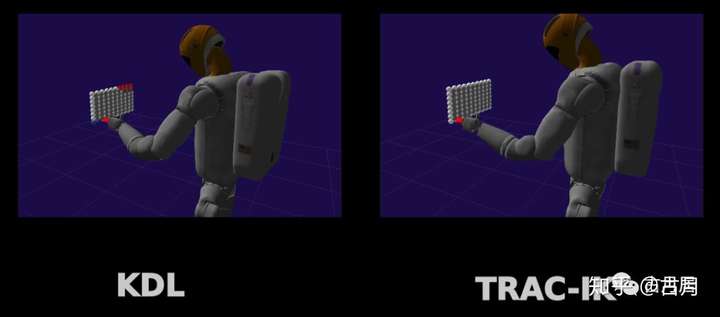
TRAC-IK和KDL类似,也是一种基于数值解的运动学插件,但是在算法层面上进行了很多改进,求解效率高了很多。比如在下边这张图中,左侧的红点是KDL无法求解的姿态点,但是在右侧使用TRAC-IK是可以求解的。
那么如何将KDL更换成TRAC-IK呢,方法很简单,ROS的软件源中已经集成了TRAC-IK的安装包,可以直接使用以下命令安装:
sudo apt-get install ros-kinetic-trac-ik-kinematics-plugin然后修改机械臂MoveIt!配置功能包下的kinematics.yaml文件就可以使用啦:
arm:kinematics_solver: tarc_ik_kinematics_plugin/trac_ikKinematicsPluginkinematics_solver_attempts: 3kinematics_solver_search_resolution: 0.005kinematics_solver_timeout: 0.05接下来再次运行demo.launch,默认加载的就是TRAC-IK运动学插件了,试试规划求解的效率是不是高了很多!
但是TRAC-IK也有问题,它是一种数值算法,每次求解得到的关节位置不一定相同。
三、IKFAST
IKFAST是一种基于解析算法的运动学插件,可以保证每次求解的一致性。

相比KDL和TRAC-IK,IKFAST的安装过程就比较复杂了,不过就笔者的使用经验来讲,IKFAST的效果还是很推荐的,所以不妨一试,以下就是IKFAST的安装配置过程。
- 安装程序:
sudo apt-get install cmake g++ git ipython minizip python-dev python-h5py python-numpy python-scipy qt4-dev-tools- 安装依赖库:
sudo apt-get install libassimp-dev libavcodec-dev libavformat-dev libavformat-dev libboost-all-dev libboost-date-time-dev libbullet-dev libfaac-dev libglew-dev libgsm1-dev liblapack-dev liblog4cxx-dev libmpfr-dev libode-dev libogg-dev libpcrecpp0v5 libpcre3-dev libqhull-dev libqt4-dev libsoqt-dev-common libsoqt4-dev libswscale-dev libswscale-dev libvorbis-dev libx264-dev libxml2-dev libxvidcore-dev- 安装OpenSceneGraph-3.4:
sudo apt-get install libcairo2-dev libjasper-dev libpoppler-glib-dev libsdl2-dev libtiff5-dev libxrandr-dev
git clone https://github.com/openscenegraph/OpenSceneGraph.git --branch OpenSceneGraph-3.4
cd OpenSceneGraph
mkdir build; cd build
cmake .. -DDESIRED_QT_VERSION=4
make -j$(nproc)
sudo make install- 安装sympy
pip install --upgrade --user sympy==0.7.1- 删除mpmath
sudo apt remove python-mpmath- 安装IKFast功能包
sudo apt-get install ros-kinetic-moveit-kinematics- 安装OpenRave
sudo apt-get install ros-kinetic-openrave- 创建collada文件
export MYROBOT_NAME="marm"
rosrun xacro xacro --inorder -o "$MYROBOT_NAME".urdf "$MYROBOT_NAME".xacro
rosrun collada_urdf urdf_to_collada "$MYROBOT_NAME".urdf "$MYROBOT_NAME".dae
- 创建dae文件
export IKFAST_PRECISION="5"
cp "$MYROBOT_NAME".dae "$MYROBOT_NAME".backup.dae # create a backup of your full precision dae.
rosrun moveit_kinematics round_collada_numbers.py "$MYROBOT_NAME".dae "$MYROBOT_NAME".dae "$IKFAST_PRECISION"- 查看生成的模型
openrave-robot.py "$MYROBOT_NAME".dae --info links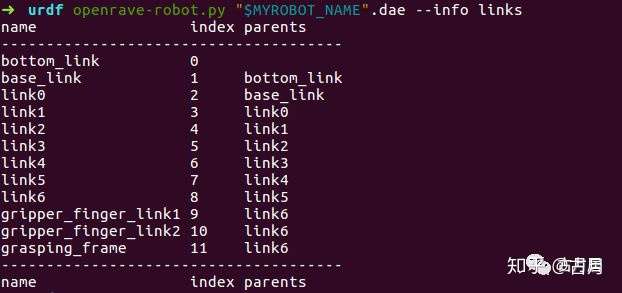
openrave "$MYROBOT_NAME".dae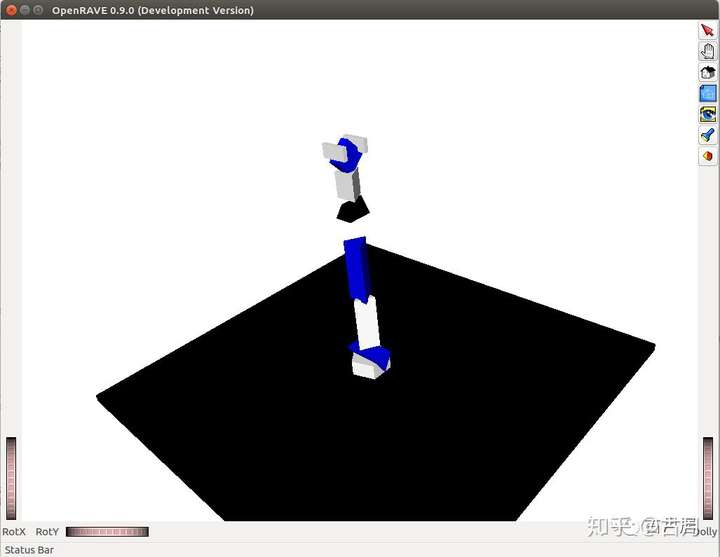
- 生成六轴机器人配置
$ export PLANNING_GROUP="arm"
$ export BASE_LINK="1"
$ export EEF_LINK="11"
$ export IKFAST_OUTPUT_PATH=`pwd`/ikfast61_"$PLANNING_GROUP".cpp
$ python `openrave-config --python-dir`/openravepy/_openravepy_/ikfast.py --robot="$MYROBOT_NAME".dae --iktype=transform6d --baselink="$BASE_LINK" --eelink="$EEF_LINK" --savefile="$IKFAST_OUTPUT_PATH"- 创建插件
export MOVEIT_IK_PLUGIN_PKG="$MYROBOT_NAME"_ikfast_"$PLANNING_GROUP"_plugincd ~/catkin_ws/src
catkin_create_pkg "$MOVEIT_IK_PLUGIN_PKG"
rosrun moveit_kinematics create_ikfast_moveit_plugin.py "$MYROBOT_NAME" "$PLANNING_GROUP" "$MOVEIT_IK_PLUGIN_PKG" "$IKFAST_OUTPUT_PATH"- 重新编译工作空间
catkin_make- 修改使用的插件
rosed "$MYROBOT_NAME"_moveit_config/config/kinematics.yaml<planning_group>:
kinematics_solver: <myrobot_name>_<planning_group>_kinematics/IKFastKinematicsPlugin
-INSTEAD OF-
kinematics_solver: kdl_kinematics_plugin/KDLKinematicsPlugin注意以上步骤中的机器人名称、运动规划组名称、坐标系序号等需要和自己所使用的机器人匹配,也可以参考官方教程配置:
http://docs.ros.org/kinetic/api/moveit_tutorials/html/doc/ikfast/ikfast_tutorial.html
现在运行demo.launch文件时,使用的运动学插件就是IKFAST了,快试一试效果是不是还不错!
机器学习基石笔记Lecture1:The Learning Problem)

)

)

)
- roslaunch 学习)

)


机器学习基石笔记Lecture2:Learning to Answer Yes/No)
)




)
下gcc-linaro-arm-linux-gnueabihf交叉编译环境安装)