保存&加载地图:

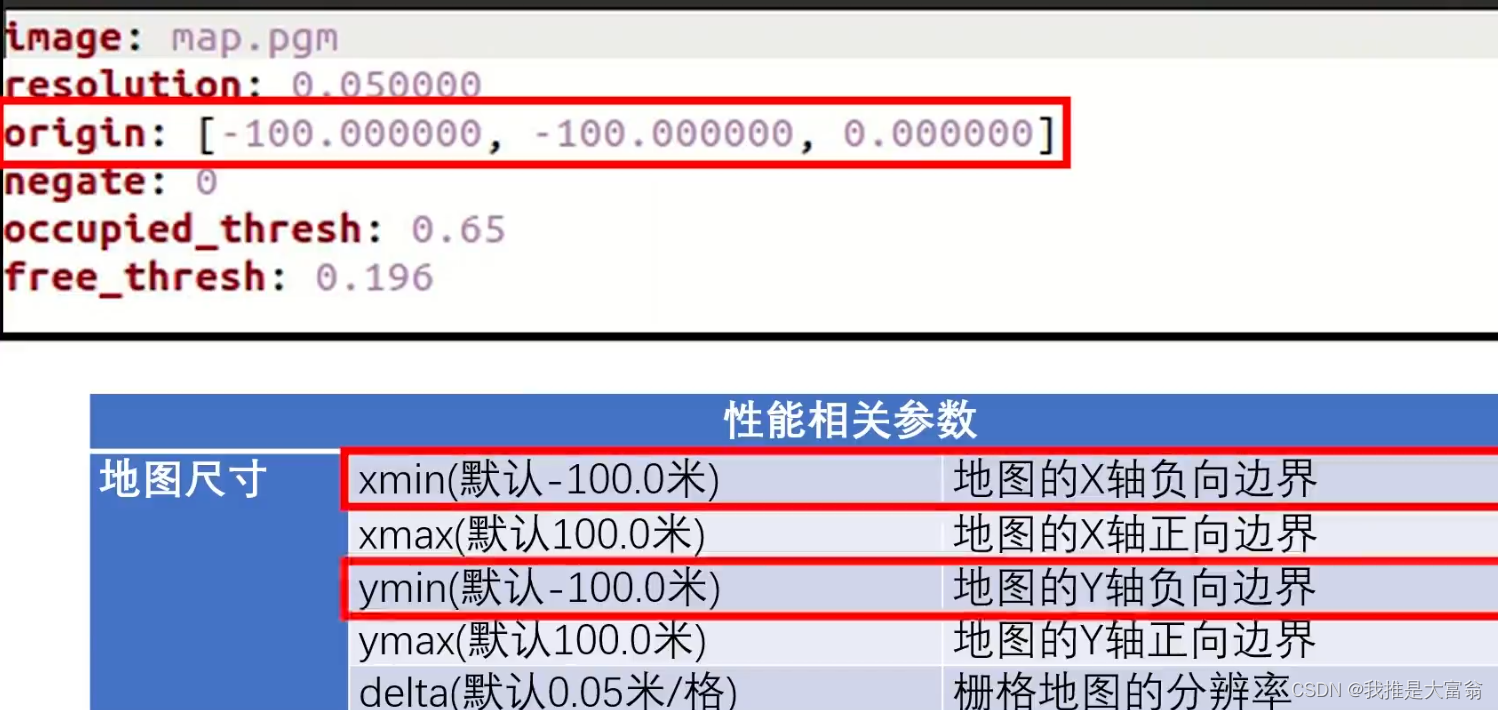
image:地图文件
resolution:地图分辨率(珊格地图)
origin:地图左下标 第三个参数是偏转角度

加载创建好的yaml文件:

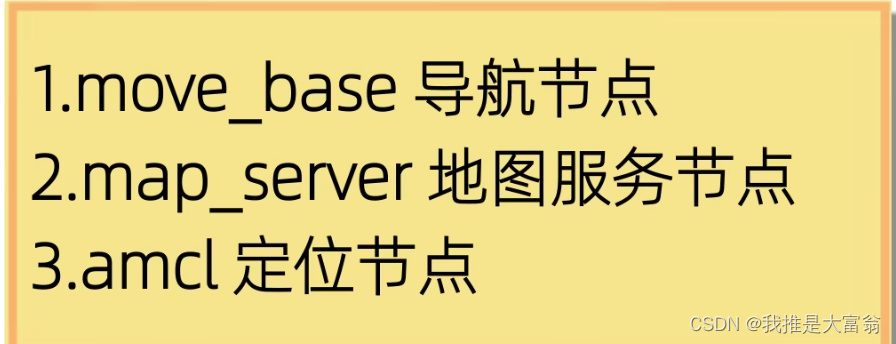
年轻人第一次导航:
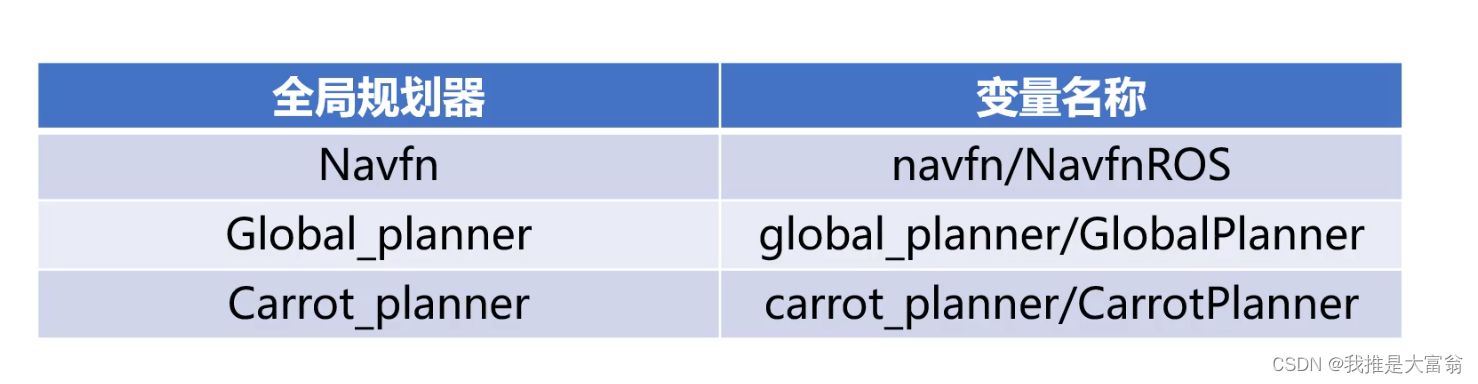
全局规划器:
代价地图设置参数:

<launch><node pkg="move_base" type="move_base" name="move_base"><rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="global_costmap" /><rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="local_costmap" /><rosparam file="$(find wpb_home_tutorials)/nav_lidar/global_costmap_params.yaml" command="load" /><rosparam file="$(find wpb_home_tutorials)/nav_lidar/local_costmap_params.yaml" command="load" /><param name="base_global_planner" value="global_planner/GlobalPlanner" /> <param name="base_local_planner" value="wpbh_local_planner/WpbhLocalPlanner" />
</node>
<node pkg="map_server" type="map_server" name="map_server" args="$(find wpr_simulation)/maps/map.yaml"/>
<node pkg="amcl" type="amcl" name="amcl" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find nav_pkg)/rviz/nav.rviz" /></launch> 添加相机: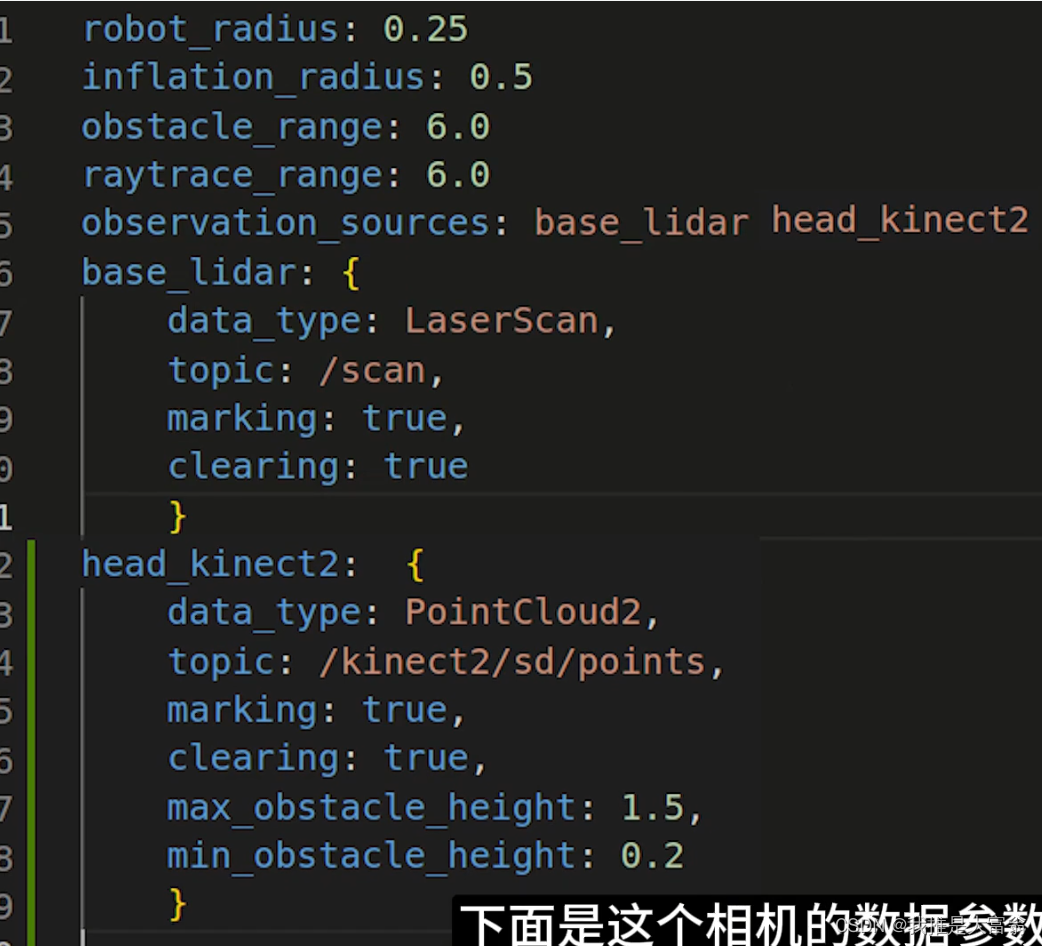


)

)









_kaic)

进行组合约束建模)


![[机缘参悟-190] - 《道家-水木然人间清醒1》读书笔记 -13- 关系界限 - IT人学会欣赏自己、与自己孤独相处,向内求](http://pic.xiahunao.cn/[机缘参悟-190] - 《道家-水木然人间清醒1》读书笔记 -13- 关系界限 - IT人学会欣赏自己、与自己孤独相处,向内求)