0. 简介
在上一章中我们详细介绍了ROS与Matlab链接的基础用法。这一章我们将来学习如何使用Matlab当中的Simulink来完成。Simulink对机器人操作系统(ROS)的支持使我们能够创建与ROS网络一起工作的Simulink模型。ROS是一个通信层,允许机器人系统的不同组件以消息的形式交换信息。组件通过将消息发布到特定的主题(如/odometry)来发送消息。其他组件通过订阅该主题来接收消息。本文内容基于慕羽★大佬文章进行了增删。同时由于Simulink的使用在ROS1和ROS2中没有太多的改动,所以我们就仅对ROS1完成了介绍
对ROS的Simulink支持包括一个Simulink块库,用于为指定的主题发送和接收消息。当您模拟模型时,Simulink连接到ROS网络,该网络可以与Simulink在同一台机器上运行,也可以在远程系统上运行。一旦建立了这个连接,Simulink就会与ROS网络交换消息,直到模拟结束。如果安装了Simulink Coder,还可以从Simulink模型为独立ROS组件或节点生成c++代码。
同时ROS1的Simulink和ROS2的Simulink支持不太一样。ROS工具箱不支持Simulink中的以下ROS功能:ROSService服务端、ROS的行为以及TF树。
如果应用程序需要这些特性,就需要使用MATLAB的ROS功能。您可以使用MATLAB编写ROS节点,该节点可以将Service服务端、行为以及TF树作为ROS消息发布到主题。然后,Simulink可以订阅该主题来处理这些消息。在MATLAB中使用以下函数来处理这些特征:
ROS服务服务器:rosservice、rosvcserver
ROS动作:rosaction, rosactionclient
转换树:rostf, transform, getTransform
对于ROS 2, Simulink只支持发布和订阅这两个功能
要查看Simulink中ROS支持的完整列表,请参见Simulink-ROS。
1. 初始化ROS并创立链接
- 在终端输入以下命令查看本机地址
ifconfig
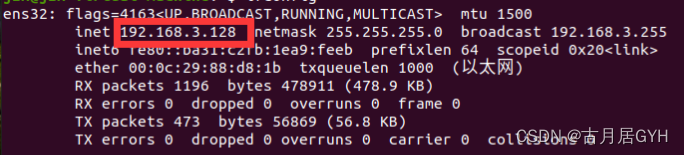
- 将本机IP写入到.bashrc文件。打开home文件夹,按Ctrl+h显示隐藏的文件,选择.bashrc并打开打开后在最后加入以下命令(后面的IP改为你的电脑的IP),然后保存退出
export ROS_IP=192.168.3.128
编辑

编辑
- 启动roscore,并获取ROS输出的IP。 在终端输入roscore启动,可以发现此时roscore会输出一个IP如下图所示:
编辑
编辑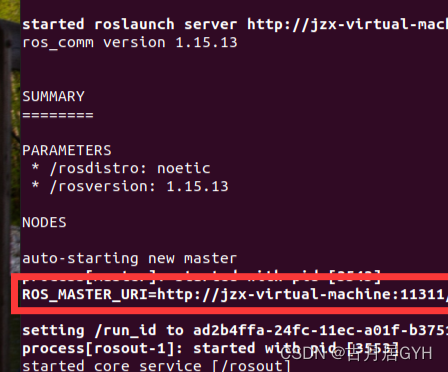
- 打开MATLAB,建立与ROS的连接。 在MATLAB的命令行窗口输入以下语句,后半部分就是我们上一步得到的ROS输出的IP
setenv('ROS_MASTER_URI','http://jzx-virtual-machine:11311')
rosinit
编辑 编辑
编辑
2. 创建一个Publisher
配置一个block,并向/location的节点发送一条geometry_msgs/Point类型的消息。需要做到以下几个步骤
- 在MATLAB工具条中,选择Home>Simulink来打开Simulink的起始页。
- 在Simulink开始页,单击空白模型创建并打开一个新的Simulink模型。
- 在Simulink工具条中,选择Simulation > Library Browser打开Simulink库浏览器。单击ROS工具箱选项卡(也可以在MATLAB命令窗口中输入roslib)。选择ROS库。
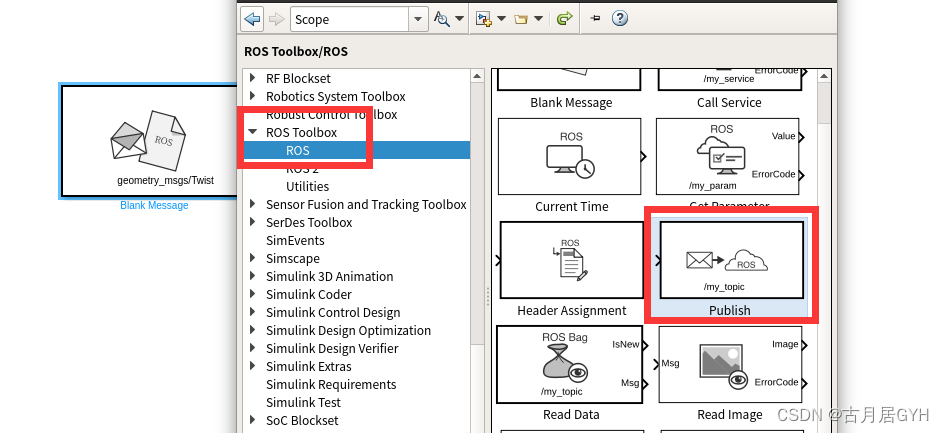
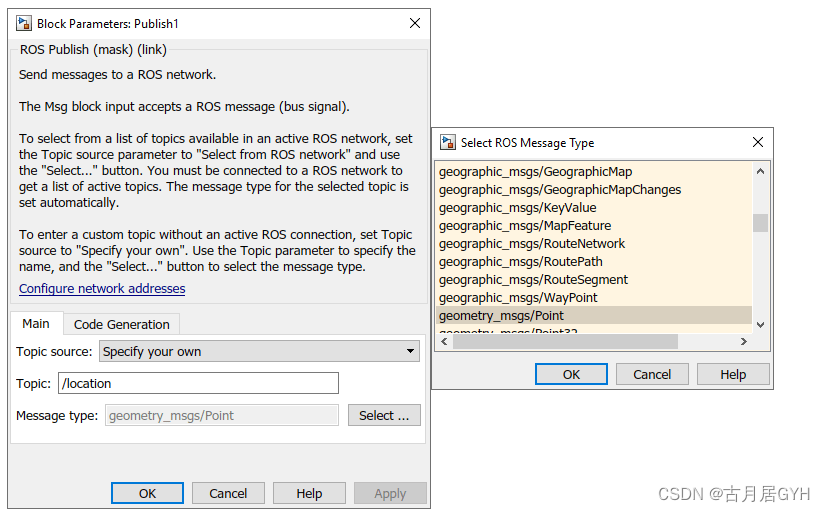
- 将Publish块拖到模型中。双击该块以配置主题和消息类型。
- 为Topic源选择Specify your own,并在Topic中输入/location。
- 单击 Message type后的Select 按钮。将出现一个弹出窗口。选择geometry_msgs/Point,单击OK关闭弹出窗口。
-
3. 创建一个Message
创建一个空白ROS消息,并用机器人路径的X和Y位置填充它。然后将更新后的ROS消息发布到ROS网络。
简单介绍一下Blank Message模块的作用:Blank Message模块用指定的消息或服务类型创建一个空白消息。Msg块的输出是一个空白的ROS消息(总线信号)。设置Class参数来选择ROS消息、服务请求和服务响应消息。这里我们使用的是ROS消息(总线信号)。可以使用总线分配块来修改总线信号中的特定字段。总线信号被初始化为零值(接地)。

具体操作如下:
- 在库浏览器中单击ROS工具箱选项卡,或在MATLAB命令行中键入roslib,选择ROS库。
- 将Blank Message块拖到模型中。双击该块以打开block的信息。
- 单击Message类型框旁边的Select,并从结果弹出窗口中选择geometry_msgs/Twist。

点击Matlab与ROS(1/2)---Simulink(二) - 古月居 可查看全文
)


 : subQUBO讲解和python实现)

、filter()详解)





)





)
)
不仅仅是展示这么简单)