目录
- 关键词
- 平台说明
- 一、背景
- 二、PDU转换
- 三、函数调用
关键词
嵌入式、C语言、autosar、OS、BSW
平台说明
| 项目 | Value |
|---|---|
| OS | autosar OS |
| autosar厂商 | vector , |
| 芯片厂商 | TI 英飞凌 |
| 编程语言 | C,C++ |
| 编译器 | HighTec (GCC) |
| autosar版本 | 4.3.X |

>>>>>回到总目录<<<<<<
一、背景
介绍了一个信号如何从应用层传输到CAN总线的函数调用。note:该报文类型为应用报文
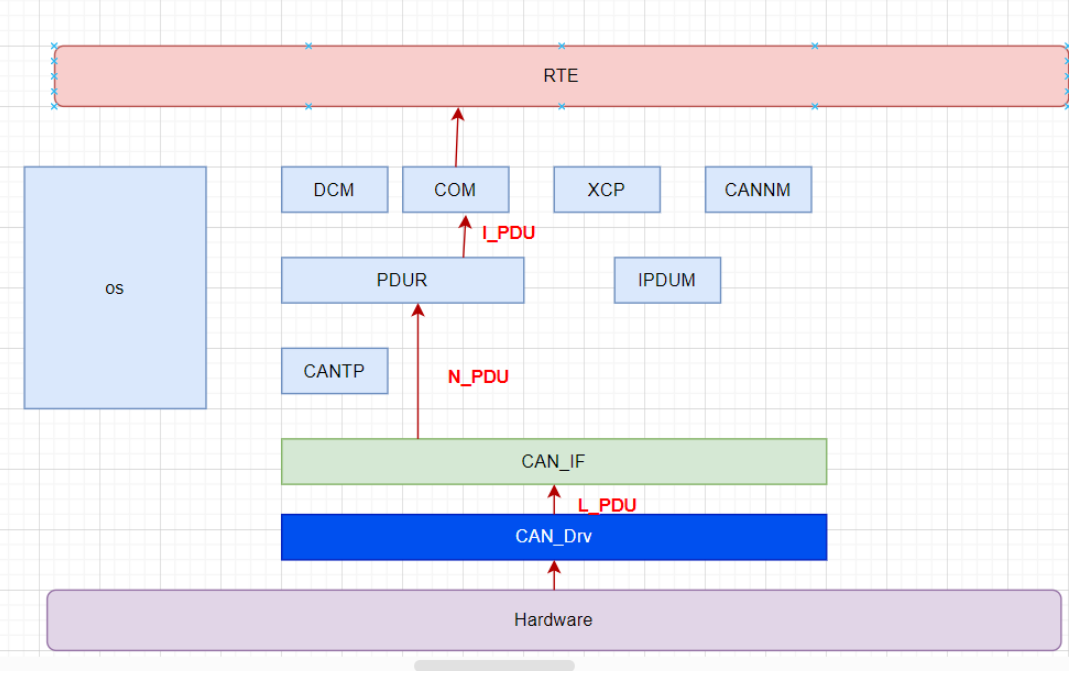
二、PDU转换
详情查看[AutoSar]BSW_Com 01 Can通信入门。
应用层将要发送的值通过Rte_Write_XX接口更新到COM 的I-PDU shadow buffer中,然后COM再向下一步一步传到 PduR—>CanIf–>CanDriver 最终到CAN总线上。
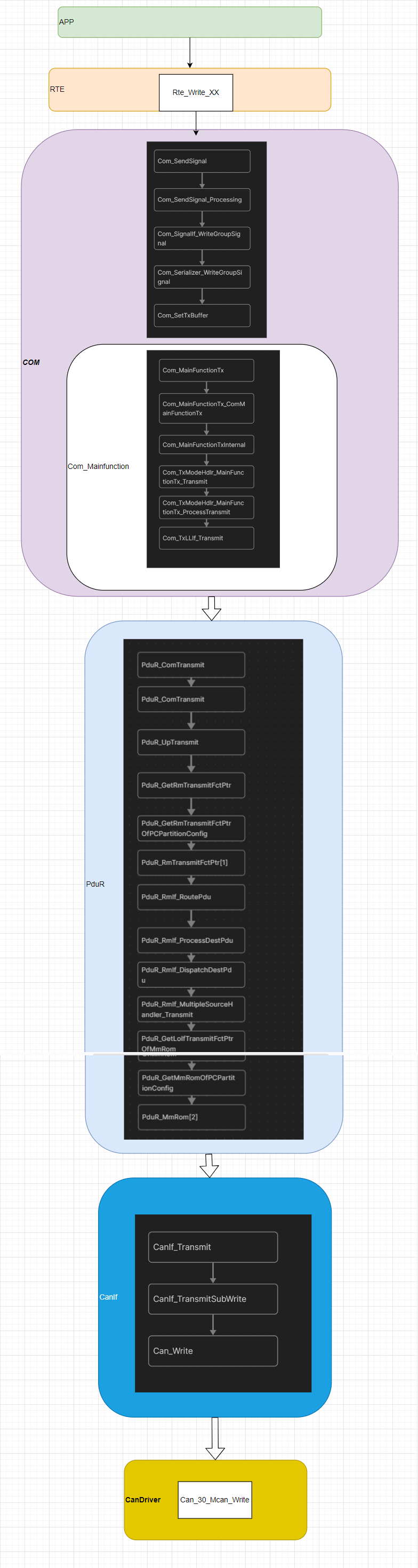
三、函数调用
typedef struct
{SduDataPtrType SduDataPtr;/*数据存放指针*/PduLengthType SduLength;/*DPU长度*/
} PduInfoType;
1.调用Com_SendSignal,后续函数会将值写入COM buffer。
2.Com_MainFunctionTx会在条件满足后将PDU传到PDUR上。
>>>>>回到总目录<<<<<<



)
详解)


)

>)









