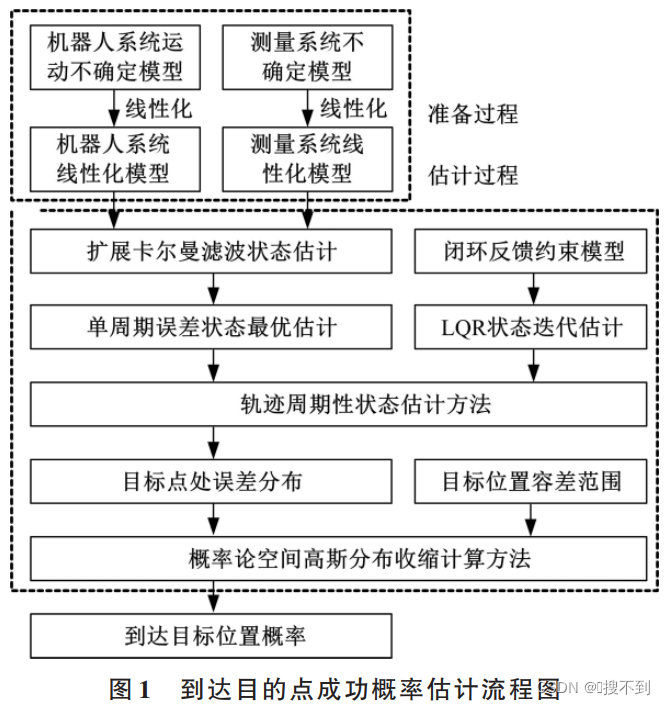
基于概率量度的机械臂视觉伺服目标捕获运动规划方法
目录
- 基于概率量度的机械臂视觉伺服目标捕获运动规划方法
- 期望轨迹序列
- 状态转移函数
- 系统测量值
- 模型线性化
- 卡尔曼滤波状态估计
- 代价函数-闭环反馈
- 轨迹误差方差
- 误差几何化表示
- 到达概率计算
参考文献:《[1]祁若龙,邵健铎,张珂等.基于概率量度的机械臂视觉伺服目标捕获运动规划方法[J].吉林大学学报(工学版),2020,50(06):2044-2054.DOI:10.13229/j.cnki.jdxbgxb20190720.》
期望轨迹序列
机器人轨迹 Π序列表示为系统预定义状态、控制输入:

其中 l l l为整条预定义轨迹的周期数,
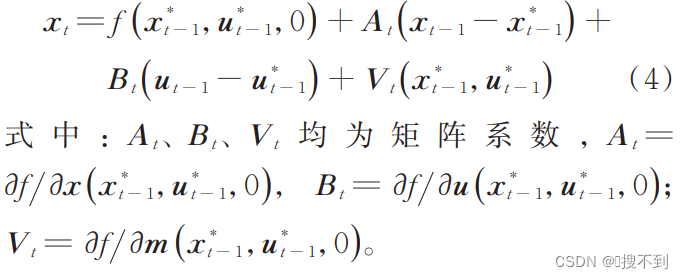
状态转移函数
下个周期的系统状态是当前系统状态、指令输入和运动误差的函数:

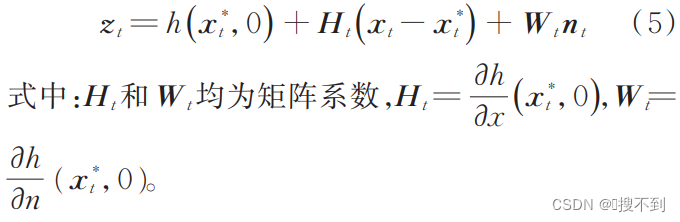
系统测量值
当机器人运动系统存在过程噪声,希望通过外部测量或机器人自身携带的传感器形成运动反馈时,测量值只与两个因素相关:一个是机器人系统状态;另一个是测量系统本身的观测噪声。写成函数的形式为:


模型线性化
针对离散化周期系统,对模型型(2、3)利用一阶 Taylor展开。
在式(2)的预定义轨迹点( x t − 1 ∗ x_{t-1}^{*} xt−1∗, u t − 1 ∗ u_{t-1}^{*} ut−1∗)处进行线性化, m t m_t mt在0处展开,则有:
在式(3)的预定义轨迹点( x t ∗ x_{t}^{*} xt∗)处进行线性化, n t n_t nt在0处展开,则有:
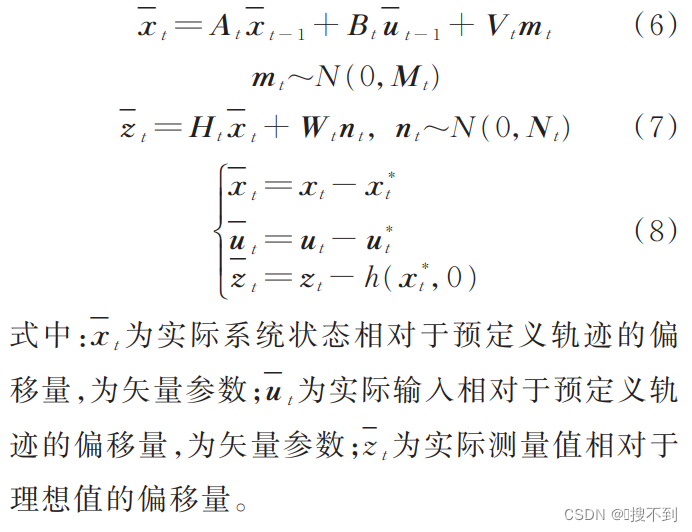
对上式整理可以得到:
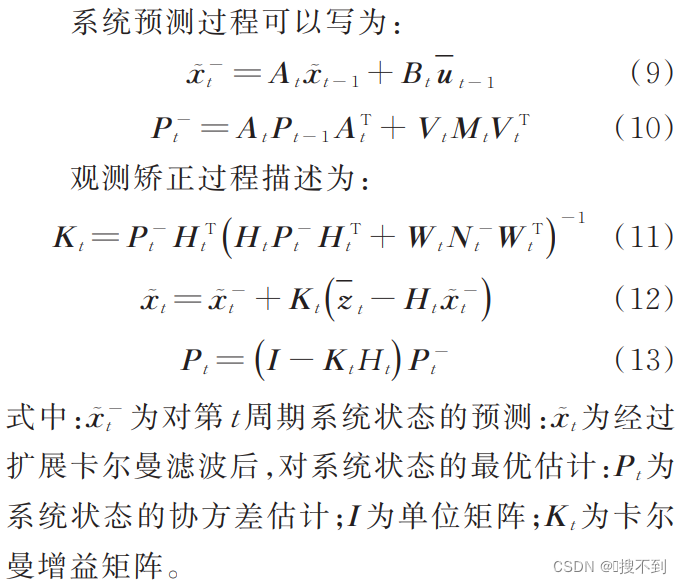
卡尔曼滤波状态估计
代价函数-闭环反馈
闭环反馈的目的是使实际轨迹与预定义轨迹之间的偏移量最小:
线性二次型(LQR)最优解具备求解过程的规范化,可简单地采用状态线性反馈控制律构成闭环最优控制系统,兼顾系统状态和输入指标。求解过程可以表示为:

轨迹误差方差
结合式(8)和(17),可得:
u t = L t x ~ t + u t ∗ x t = x ‾ t + x t ∗ u_{t}=L_{t}\tilde{x}_{t}+u_{t}^{*} \\ x_{t}= \overline{x}_{t}+x_{t}^{*} ut=Ltx~t+ut∗xt=xt+xt∗
进一步可整理为:
通过式(21)~(23)对整个轨迹过程的各中断周期内的系统状态进行估计。
将式(9、17)代入式(12),得到:

将式(6、7、9)代入式(24),转化为:
将式(17)代入式(6)得:
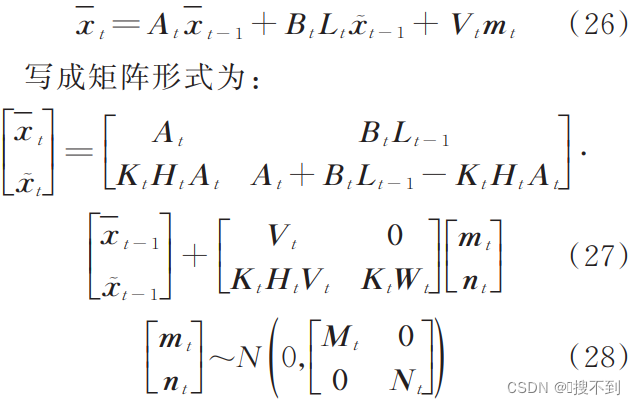
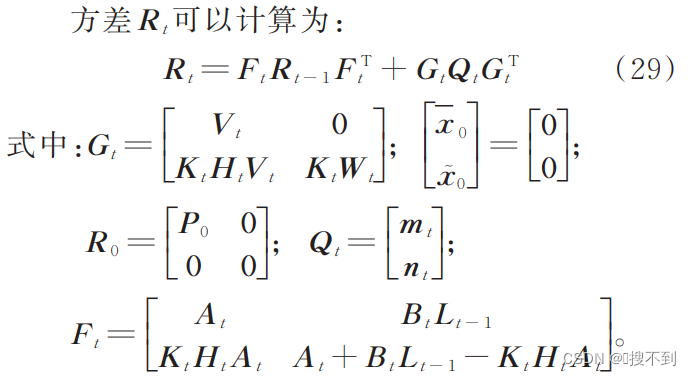
系统状态的初始方差 R 0 R_0 R0 可以设置为一个较大的初始值,这个初始值会随着系统状态估计迅速收敛到正常的估计值范围。
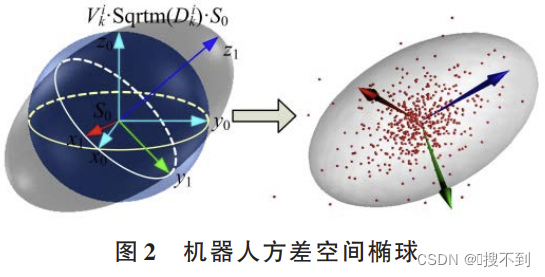
误差几何化表示
为了得到机械臂关节、末端的误差分布,将关节空间的协方差向笛卡尔空间映射,得到机械臂在笛卡尔空间下的误差特性。
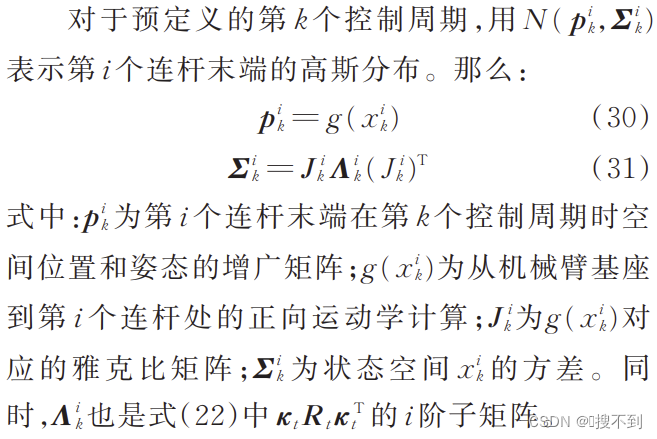


其中 V k i V_k^i Vki是特征值, D k i D_k^i Dki是特征矢量。

到达概率计算
在定义机器人运动的目标位置时会给出到达目的点的允许误差,例如:x_{goal} ± h。其中,x_{goal} 为目标位置,h 为允许的误差范围。
在三维空间中,机器人运动的目标区域范围可以看作是立方体,需要计算立方体的 6 个面与空间方差椭球之间的相关关系。
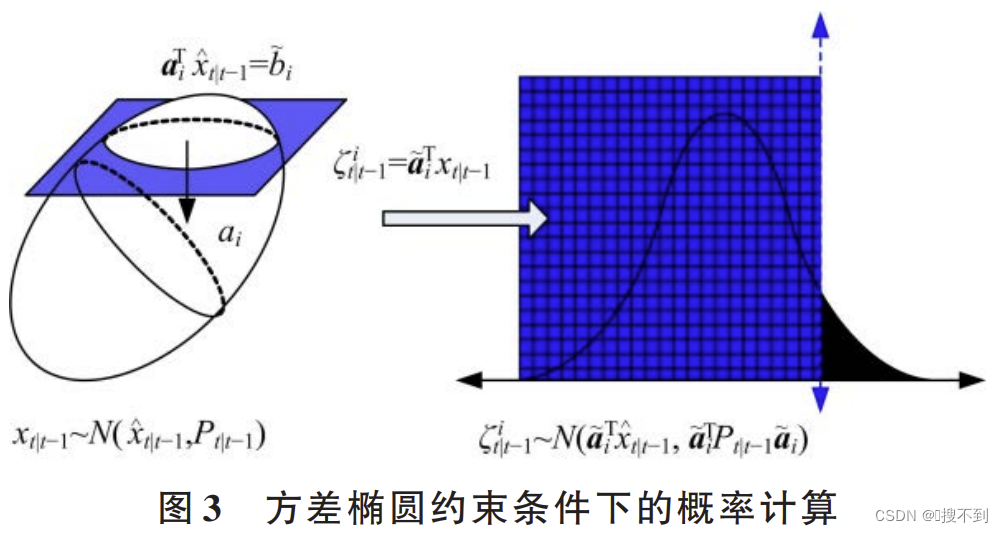
首先,只考虑概率分布 x t ∣ t − 1 x_{t|t - 1} xt∣t−1与第一个立方体平面约束 S_1 方程 a 1 T x < b 1 a_1^T x < b_1 a1Tx<b1范围内的概率分布和方差椭球缩放情况。
平面方程写成向量形式为 a 1 T x = b 1 a_1^T x = b_1 a1Tx=b1,其中 a 1 a_1 a1 为首个约束平面的法向单位矢量, b 1 b_1 b1 为平面方程的常量参数。
为了能将三维概率椭球投影到一维空间进行正态分布概率计算,逐个采用约束平面,对分布为 x t ∣ t − 1 ∼ N ( x ^ k ∣ k − 1 , P k ∣ k − 1 ) x_{t|t - 1} \sim N(\hat{x}_{k|k - 1},P_{k|k - 1}) xt∣t−1∼N(x^k∣k−1,Pk∣k−1)的概率椭圆(或椭球)进行剖分,并向一维空间投影得到正态分布,从而在一维空间下,进行满足限定约束条件的正态分布的概率计算,其计算方法示意图如图 3 所示。



)










)

)


