无人机的定义
无人驾驶航空器,是一架由遥控站管理(包括远程操纵或自主飞行)的航空器,也称遥控驾驶航空器,以下简称无人机。
无人机系统的定义
无人机系统,也称无人驾驶航空器系统,是指一架无人机、相关的遥控站、所需的指令与控制数据链路以及批准的型号设计规定的任何其他部件组成的系统。

无人机系统驾驶员的定义
无人机系统驾驶员,由运营人指派对无人机的运行负有必不可少职责并在飞行期间适时操纵飞行控制的人。无人机系统的机长,是指在系统运行时间内负责整个无人机系统运行和安全的驾驶员。

按用途分类
军用无人机可分为侦察无人机、诱饵无人机、电子对抗无人机、通信中继无人机、无人战斗机以及靶机等。民用无人机可分为巡查\监视无人机、农用无人机、气象无人机、勘探无人机以及测绘无人机等。

飞行性能
速度性能
最大平飞速度:飞机水平直线平衡飞行时,在一定飞行距离内(一般不小于3千米),发动机推力在最大状态下,飞机所能达到的最大飞行速度。
最小飞行速度:在一定高度上飞机能维持水平直线飞行的最小速度。
巡航飞行速度(远航速度,区别于久航速度):发动机每公里消耗燃油量最小情况下的飞行速度。
高度性能
理论静升限:飞机能水平直线飞行的最大高度。
实用静升限:飞机最大爬升率等于0.5m/s(亚声速飞机)或5m/s(超声速飞机)时所对应的飞行高度。
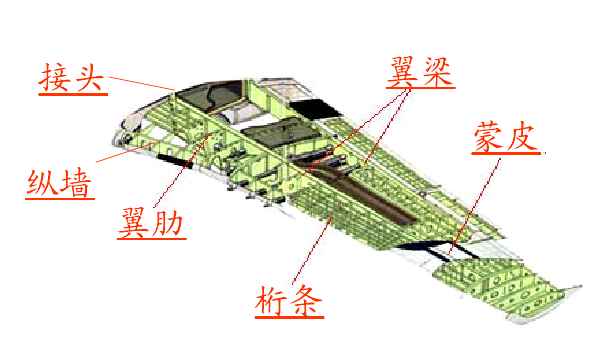
机翼结构名称
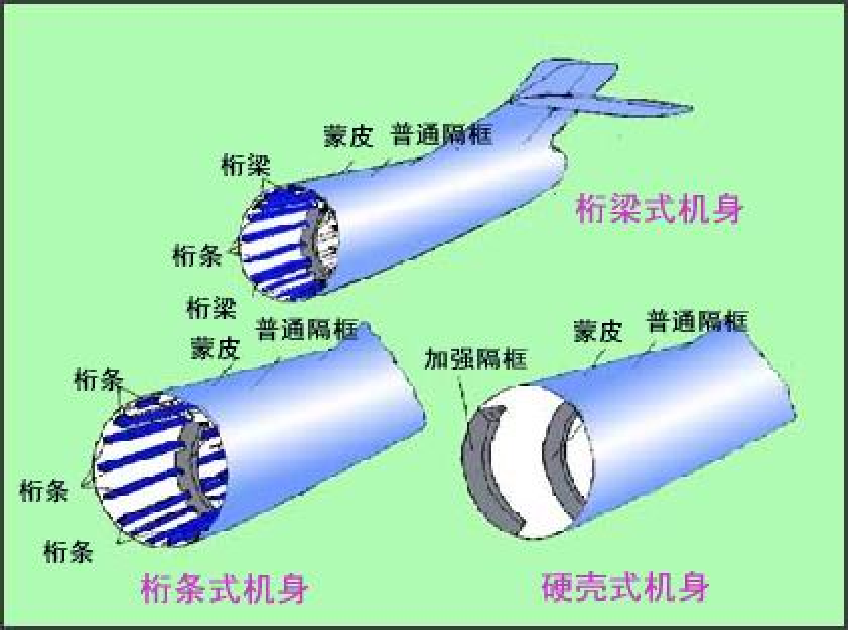
机身结构名称
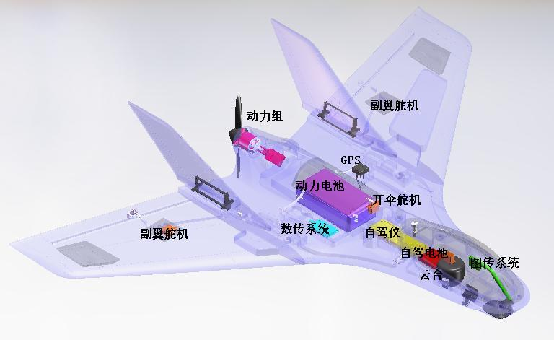
动力装置
无人机的发动机以及保证发动机正常工作所必需的系统和附件的总称。无人机使用的动力装置主要有活塞式发动机、涡喷发动机、涡扇发动机、涡桨发动机、涡轴发动机、冲压发动机、火箭发动机、电动机等。目前主流的民用无人机所采用的动力系统通常为活塞式发动机和电动机两种。
导航飞控系统---导航子系统
导航子系统功能:向无人机提供相对于所选定的参考坐标系的位置、速度、飞行姿态,引导无人机沿指定航线安全、准时、准确飞行。因此导航子系统之于无人机相当于领航员之于有人机。
获得必要的导航要素:高度、速度、姿态、航向;
给出满足精度要求的定位信息:经度、纬度;
引导飞机按规定计划飞行;
接收预定任务航线计划的装定、并对任务航线的执行进行动态管理;
接收控制站的导航模式控制指令并执行;并具有指令导航模式与预定航线飞行模式相互切换的功能;
具有接收并融合无人机其它设备的辅助导航定位信息的能力;
配合其它系统完成各种任务。
导航飞控系统---飞控子系统
飞控子系统是无人机完成起飞、空中飞行、执行任务、返场回收等整个飞行过程的核心系统,对无人机实现全权控制与管理,因此飞控子系统之于无人机相当于驾驶员之于有人机,是无人机执行任务的关键。
无人机姿态稳定与控制;
与导航子系统协调完成航迹控制;
无人机起飞(发射)与着陆(回收)控制;
无人机飞行管理;
无人机任务设备管理与控制;
应急控制;
信息收集与传递。
导航飞控系统---常用传感器
无人机导航飞控系统常用的传感器包括角速率传感器、姿态传感器、位置传感器、迎角侧滑角传感器、加速度传感器、高度传感器及空速传感器等,这些传感器构成无人机导航飞控系统设计的基础。

导航飞控系统---飞控计算机(自驾)
导航飞控计算机或简称飞控计算机是导航飞控系统的核心部件,飞控计算机应具备如下功能:
姿态稳定与控制;
导航与制导控制;
自主飞行控制;
自动起飞、着陆控制;
导航飞控系统---飞控计算机硬件
导航飞控计算机或简称飞控计算机是导航飞控系统的核心部件,飞控计算机应具备如下功能:
主处理控制器通用型处理器(MPU)、微处理器(MCU)、数字信号处理器(DSP)+可编程门阵列( FPGA )
二次电源5V、±15V等直流电源
模拟量输入/输出接口、离散量接口
通信接口RS232/RS422/RS485 ARINC429、1553B总线
余度管理信息交换电路,同步指示电路,通道故障逻辑综合电路及故障切换电路。
加温电路、检测接口、飞控计算机机箱。
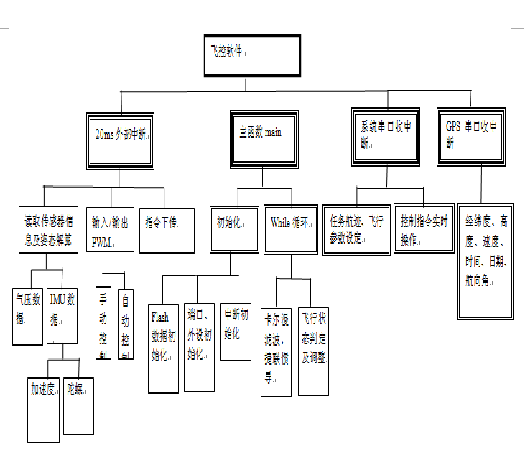
导航飞控系统---机载飞控软件
机载导航飞控软件或简称机载飞控软件是一种运行于飞控计算机上的嵌入式实时任务软件,不仅要求功能正确、性能好、效率高,而且要求其具有较好的质量保证、可靠性和可维护性。
硬件接口驱动模块;传感器数据处理模块;飞行控制律模块;导航与制导律模块;飞行任务管理模块;任务设备管理模块;余度管理模块;数据传输、记录模块;自检测模块;其它模块。
导航飞控系统---执行机构
无人机执行机构都是伺服作动设备,是导航飞控系统的重要组成部分。其主要功能是根据飞控计算机的指令,按规定的静态和动态要求,通过对无人机各控制舵面和发动机节风门等的控制,实现对无人机的飞行控制。
电动伺服执行机构 、电液伺服执行机构、气动伺服执行机构。
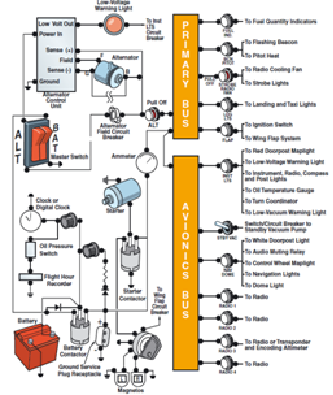
电气系统
无人机电气系统可分为机载电气系统和地面供电系统两部分。机载电气系统主要由主电源、应急电源、电气设备的控制与保护装置及辅助设备组成。
电气系统一般包括电源、配电系统、用电设备3个部分,电源和配电两者组合统称为供电系统。供电系统的功能是向无人机各用电系统或设备提供满足预定设计要求的电能。
任务设备
按任务设备用途,可以分为侦查搜索设备、测绘设备、军用专用设备、民用专用设备等。侦搜设备常用的有光电平台、SRA雷达、激光测距仪等,测绘设备则是测绘雷达、航拍相机等。
控制站---介绍
无人机地面站也称控制站、遥控站或任务规划与控制站。在规模较大的无人机系统中,可以有若干个控制站,这些不同功能的控制站通过通信设备连接起来,构成无人机地面站系统
指挥调度功能主要包括上级指令接收、系统之间联络、系统内部调度;
任务规划功能主要包括飞行航路规划与重规划、任务载荷工作规划与重规划;
操作控制功能主要包括起降操纵、飞行控制操作、任务载荷操作、数据链控制;
显示记录功能主要包括飞行状态参数显示与记录、航迹显示与记录、任务载荷信息显示与记录等。

控制站---系统组成
四类硬件:
数据链路控制、飞行控制、载荷控制、载荷数据处理等四类硬件设备机柜或机箱构成。
三类不同功能控制站模块:
指挥处理中心:制定任务、完成载荷数据的处理和应用,一般都是通过无人机控制站等间接地实现对无人机的控制和数据接收;
无人机控制站:飞行操纵、任务载荷控制、数据链路控制和通信指挥。
载荷控制站:载荷控制站与无人机控制站的功能类似,但载荷控制站只能控制无人机的机载任务设备,不能进行无人机的飞行控制。
控制站
地面控制站内的飞行控制席位、任务设备控制席位、数据链管理席位都设有相应分系统的显示装置,因此需综合规划,确定所显示的内容、方式、范围。
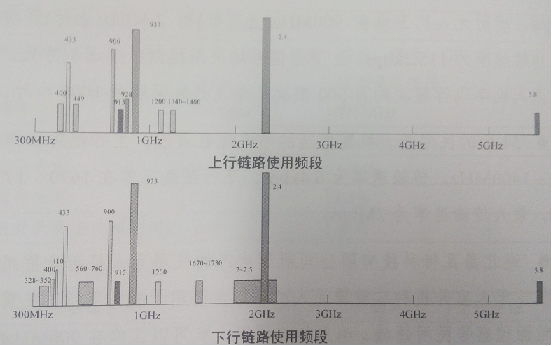
通讯链路
无人机通讯链路:主要用于无人机系统传输控制、无载荷通讯、载荷通讯三部分信息的无线电链路。
根据ITU-R M.2171报告给出的无人机系统通讯链路是指控制和无载荷链路,主要包括:指挥与控制(C&C),空中交通管制(ATC),感知和规避(S&A)三种链路。

使用docker搭建springBoot/springCloud服务)

字符串前N个字符或者从第几个字符开始取几个字符)
【2024 C卷|100分】)




128.最长连续序列(c++详细解释)DAY8)
{Image tutorial}·{Python语言})







 - 剪辑时如何找到合适的音乐?!)
