本节主要介绍以下内容:
一、CH395Q驱动库移植
二、源码分析
一、CH395Q驱动库移植
驱动库移植主要有两个途径,一个是南京沁恒官方网址,一个是通过正点原子官方,原子官方对沁横官方提供的驱动库进行了完善与修改。自用的话推荐原子官方。

原子与沁横官网相比主要有以下区别:
(1)在沁恒的基础上对格式进行了规范,并且条件编译相对较少
(2)统一了接口,并且添加了部分辅助功能。
1.1 移植流程
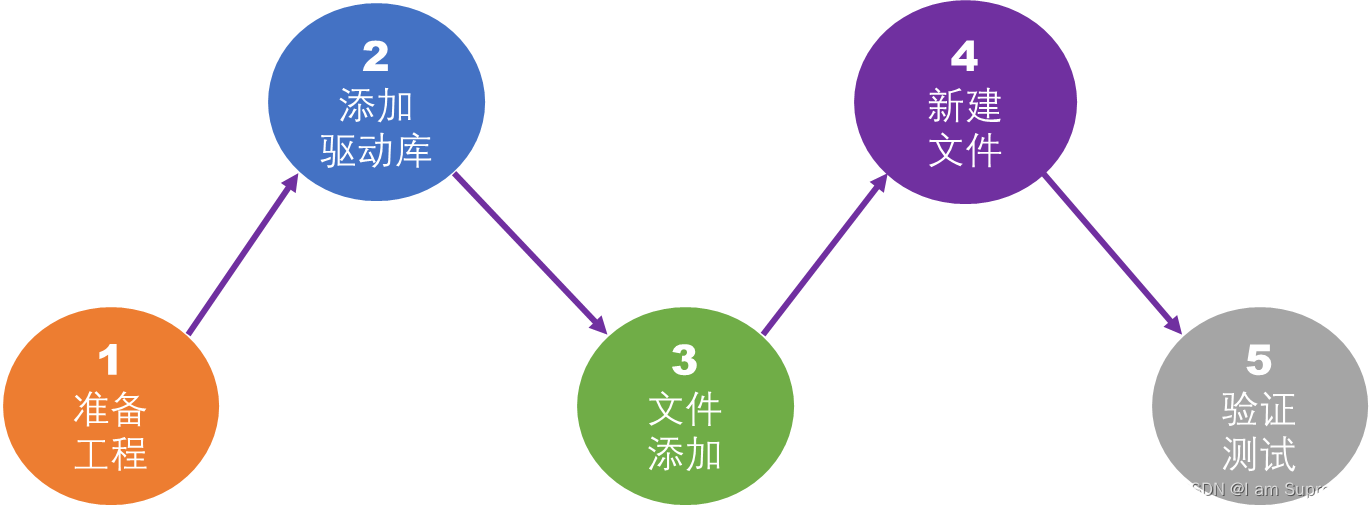
1.2 准备工程
在裸机例程中,以跑马灯实验作为移植基础工程
重命名工程为《网络实验1 CH395移植实验》
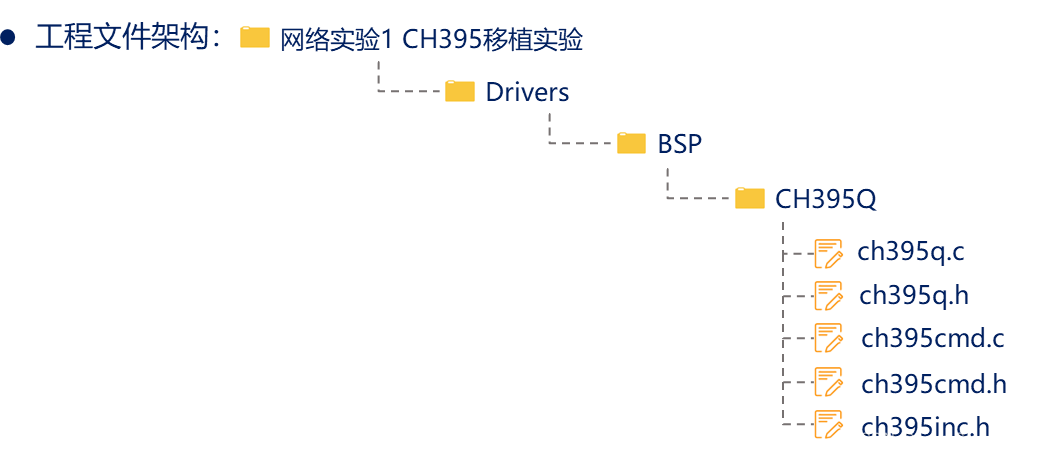
按照以下结构新建文件夹:
在原子的例程中拷贝ch395.c/.h、ch395cmd.c/.h和ch395inc.h到新工程的Drivers\BSP\CH395Q路径下
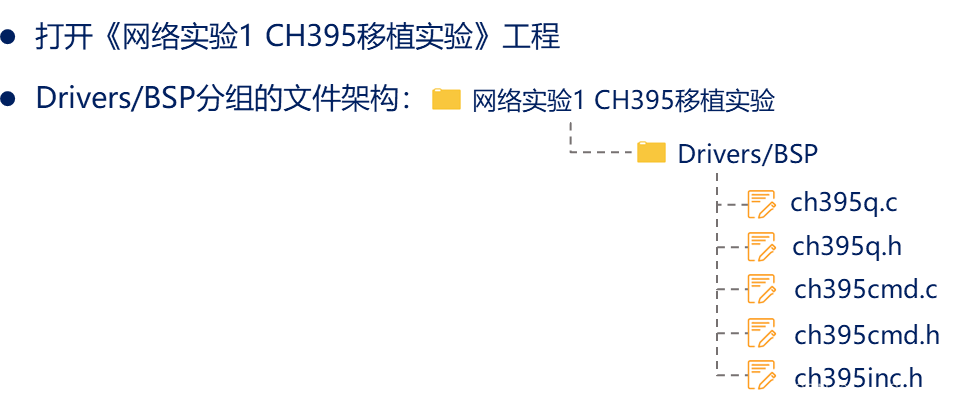
1.3 文件添加
打开工程,在Drivers/BSP分组下添加CH395Q驱动库
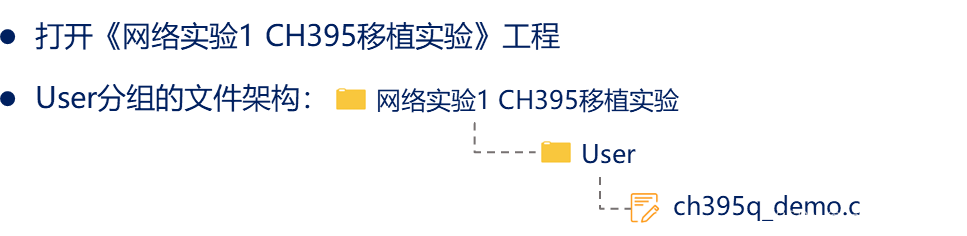
1.4 新建文件
新建ch395q_demo.c/,h文件,此文件用来编写测试代码。
1.5 验证测试
在ch395q_demo.c文件下编写以下测试代码
void ch395_demo(void)
{
do
{
if (ch395_int_pin_wire == 0)
{
ch395q_handler(); /* 中断处理函数 */
}
} while (g_ch395q_sta.dhcp_status == DHCP_STA); /* 获取DHCP */
while(1)
{
ch395q_handler();
}
}
mian.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
#include "./MALLOC/malloc.h"
#include "./BSP/SRAM/sram.h"
#include "./BSP/CH395Q/ch395.h"
#include "./APP/ch395_demo.h"int main(void)
{HAL_Init(); /* 初始化HAL库 */sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */delay_init(72); /* 延时初始化 */usart_init(115200); /* 串口初始化为115200 */led_init(); /* 初始化LED */lcd_init(); /* 初始化LCD */key_init(); /* 初始化按键 */sram_init(); /* 初始化外部SRAM */my_mem_init(SRAMIN); /* 初始化内部内存 */my_mem_init(SRAMEX); /* 初始化外部内存 */ch395_hardware_init(); /* ch395初始化 */ch395_demo(); /* 例程测试 */}
验证通过可按照上图对IP、网关掩码等进行打印。
接下来,对IP进行ping包,ping通则表示验证成功,则移植完毕。
二、驱动库分析
2.1 驱动文件介绍
| 文件 | 说明 |
| ch395inc.h | 定义CH395Q相关命令及类型 |
| ch395cmd.c | 定义CH395Q相关命令函数 |
| ch395cmd.h | 声明函数提供外部文件调用 |
| ch395.c | 实现UDP、TCP连接等相关功能 |
| ch395.h | 声明函数、结构体等信息 |
接下来分文件去介绍
ch395inc.h

ch395cmd.c/.h
ch395.h

ch395.c

2.2 代码分析
2.2.1 ch395_hardware_init();ch395初始化
我们go to 进去
*** @brief ch395_tcp初始化* @param 无* @retval 无*/
void ch395_hardware_init(void)
{uint8_t i;ch395_gpio_init();spi1_init();g_ch395q_sta.ch395_error = ch395_error;g_ch395q_sta.ch395_phy_cb = ch395_phy_status;g_ch395q_sta.ch395_reconnection = ch395_reconnection;g_ch395q_sta.dhcp_status = DHCP_STA;i = ch395_cmd_check_exist(0x65); /* 测试命令,用于测试硬件以及接口通讯 */if (i != 0x9a){g_ch395q_sta.ch395_error(i); /* ch395q检测错误 */}ch395_cmd_reset(); /* 对ch395q复位 */delay_ms(100); /* 这里必须等待100以上延时 */g_ch395q_sta.ch395_error(ch395_cmd_init()); /* 初始化ch395q命令 */ch395_socket_r_s_buf_modify(); /* 设置socket接口的接收与发送缓冲区*/
// ch395_set_tcpmss(536);
// ch395_set_start_para(FUN_PARA_FLAG_TCP_SERVER | SOCK_CTRL_FLAG_SOCKET_CLOSE);do{g_ch395q_sta.phy_status = ch395_cmd_get_phy_status(); /* 获取PHY状态 */ g_ch395q_sta.ch395_phy_cb(g_ch395q_sta.phy_status); /* 判断双工和网速模式 */ }while(g_ch395q_sta.phy_status == PHY_DISCONN);g_ch395q_sta.version = ch395_cmd_get_ver(); /* 获取版本 */printf("CH395VER : %2x\r\n", (uint16_t)g_ch395q_sta.version);i = ch395_dhcp_enable(1); /* 开启DHCP */g_ch395q_sta.ch395_error(i); /* ch395q检测错误 */delay_ms(1000); /* ch395q初始化延时 */
}接下来对该函数进行逐行解读,首先是ch395_gpio_init
/*** @brief ch395_gpio初始化* @param 无* @retval 无*/
void ch395_gpio_init( void )
{GPIO_InitTypeDef gpio_init_struct;CH395_SCS_GPIO_CLK_ENABLE(); /* 使能SCS时钟 */CH395_INT_GPIO_CLK_ENABLE(); /* 使能INT时钟 */CH395_RST_GPIO_CLK_ENABLE(); /* 使能RST时钟 *//* SCS */gpio_init_struct.Pin = CH395_SCS_GPIO_PIN;gpio_init_struct.Speed = GPIO_SPEED_FREQ_MEDIUM;gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推拉输出 */HAL_GPIO_Init( CH395_SCS_GPIO_PORT, &gpio_init_struct );/* 初始化中断引脚 */gpio_init_struct.Pin = CH395_INT_GPIO_PIN;gpio_init_struct.Mode = GPIO_MODE_INPUT; /* 输入 */gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */HAL_GPIO_Init( CH395_INT_GPIO_PORT, &gpio_init_struct );gpio_init_struct.Pin = CH395_RST_GPIO_PIN;gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 输出 */gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */HAL_GPIO_Init( CH395_RST_GPIO_PORT, &gpio_init_struct );HAL_GPIO_WritePin(CH395_RST_GPIO_PORT, CH395_RST_GPIO_PIN, GPIO_PIN_SET);delay_ms(20);
}这部分没什么说的,就是对GPIO进行配置,注意模式就行
接下来是spi1_init();
/*** @brief SPI初始化代码* @note 主机模式,8位数据,禁止硬件片选* @param 无* @retval 无*/
void spi1_init(void)
{SPI1_SPI_CLK_ENABLE(); /* SPI1时钟使能 */g_spi1_handler.Instance = SPI1_SPI; /* SPI1 */g_spi1_handler.Init.Mode = SPI_MODE_MASTER; /* 设置SPI工作模式,设置为主模式 */g_spi1_handler.Init.Direction = SPI_DIRECTION_2LINES; /* 设置SPI单向或者双向的数据模式:SPI设置为双线模式 */g_spi1_handler.Init.DataSize = SPI_DATASIZE_8BIT; /* 设置SPI的数据大小:SPI发送接收8位帧结构 */g_spi1_handler.Init.CLKPolarity = SPI_POLARITY_HIGH; /* 串行同步时钟的空闲状态为高电平 */g_spi1_handler.Init.CLKPhase = SPI_PHASE_2EDGE; /* 串行同步时钟的第二个跳变沿(上升或下降)数据被采样 */g_spi1_handler.Init.NSS = SPI_NSS_SOFT; /* NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制 */g_spi1_handler.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_256; /* 定义波特率预分频的值:波特率预分频值为256 */g_spi1_handler.Init.FirstBit = SPI_FIRSTBIT_MSB; /* 指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始 */g_spi1_handler.Init.TIMode = SPI_TIMODE_DISABLE; /* 关闭TI模式 */g_spi1_handler.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE; /* 关闭硬件CRC校验 */g_spi1_handler.Init.CRCPolynomial = 7; /* CRC值计算的多项式 */HAL_SPI_Init(&g_spi1_handler); /* 初始化 */spi1_set_speed(SPI_BAUDRATEPRESCALER_2);__HAL_SPI_ENABLE(&g_spi1_handler); /* 使能SPI2 */spi1_read_write_byte(0Xff); /* 启动传输, 实际上就是产生8个时钟脉冲, 达到清空DR的作用, 非必需 */
}对SPI进行配置和使能,这块也没什么要改的,SPI一般都这样配置
g_ch395q_sta.ch395_error = ch395_error;g_ch395q_sta.ch395_phy_cb = ch395_phy_status;g_ch395q_sta.ch395_reconnection = ch395_reconnection;g_ch395q_sta.dhcp_status = DHCP_STA;这块是对结构体成员函数进行赋值,g_ch395q_sta是一个结构体
struct ch395q_t g_ch395q_sta;
结构体定义如下:
struct ch395q_t
{uint8_t version; /* 版本信息 */uint8_t phy_status; /* PHY状态 */uint8_t dhcp_status; /* DHCP状态 */uint8_t ipinf_buf[20]; /* 获取IP信息 */struct{ch395_socket config; /* 配置信息 */} socket[8]; /* Socket状态 */void (*ch395_error)(uint8_t i); /* ch395q错误检测函数 */void (*ch395_phy_cb)(uint8_t phy_status); /* ch395q phy状态回调函数 */void (*ch395_reconnection)(void); /* ch395q 重新连接函数 */
};接下来首先是是对CH395进行检测,该命令前面讲过,传入0x65,返回值按位取反得到0x9a,如果不是0x9a,则利用以下代码对错误码进行打印。
/*** @brief 调试使用,显示错误代码,并停机* @param ierror 检测命令* @retval 无*/
void ch395_error(uint8_t ierror)
{if (ierror == CMD_ERR_SUCCESS){return; /* 操作成功 */}printf("Error: %02X\r\n", (uint16_t)ierror); /* 显示错误 */while ( 1 ){delay_ms(200);delay_ms(200);}
}接下来CH395进行复位,为硬件复位
/*** @brief 复位ch395芯片* @param 无* @retval 无*/
void ch395_cmd_reset(void)
{ch395_write_cmd(CMD00_RESET_ALL);ch395_scs_hign;
}
该命令使CH395执行硬件复位。通常情况下,硬件复位在50mS 时间之内完成。所以我们此处在初始化后面延时了100ms,保证初始化完成。
如果初始化失败,对错误码进行打印,这个上面说过,此处不作赘述。
g_ch395q_sta.ch395_error(ch395_cmd_init());
接下来对ch395_socket_r_s_buf_modify(); 函数进行讲解,该函数对socket接口的接收与发送缓冲区大小进行设置,一共0-7,8个socket,将24K内存分成0-47,48块,每块为512K字节。比如说设置socket0的recv_buf,第一个参数是0,就是设置socket0的recv_buf,第二个参数是0,表示从块的0索引值开始,最后一个参数是4,表示分配4块,4*512= 2k,也就是说recv_buf分配了2k内存。send_buf同理,设置socket0的send_buff从4索引值开始,分配2块内存。
*** @brief 设置socket接口的接收与发送缓冲区* @param 无* @retval 无* 0-47块 每块为512K字节*/
void ch395_socket_r_s_buf_modify(void)
{ch395_set_socket_recv_buf(0,0,4); /* Socket 0 ,接收缓冲区4*512 = 2K,发送缓冲区2*512 = 1K*/ch395_set_socket_send_buf(0,4,2); ch395_set_socket_recv_buf(1,6,4); /* Socket 1 */ch395_set_socket_send_buf(1,10,2); ch395_set_socket_recv_buf(2,12,4); /* Socket 2 */ch395_set_socket_send_buf(2,16,2); ch395_set_socket_recv_buf(3,18,4); /* Socket 3 */ch395_set_socket_send_buf(3,22,2); ch395_set_socket_recv_buf(4,24,4); /* Socket 4 */ch395_set_socket_send_buf(4,28,2); ch395_set_socket_recv_buf(5,30,4); /* Socket 5 */ch395_set_socket_send_buf(5,34,2);ch395_set_socket_recv_buf(6,36,4); /* Socket 6 */ch395_set_socket_send_buf(6,40,2); ch395_set_socket_recv_buf(7,42,4); /* Socket 7 */ch395_set_socket_send_buf(7,46,2); }/*** @brief 设置socket接收缓冲区* @param sockindex socket索引,址,blknum* @param startblk 起始地* @param 单位缓冲区个数 ,单位为512字节* @retval 无*/
void ch395_set_socket_recv_buf(uint8_t sockindex, uint8_t startblk, uint8_t blknum)
{ch395_write_cmd(CMD30_SET_RECV_BUF);ch395_write_data(sockindex);ch395_write_data(startblk);ch395_write_data(blknum);
}/*** @brief 设置socket发送缓冲区* @param sockindex socket索引* @param startblk 起始地址* @param blknum 单位缓冲区个数* @retval 无*/
void ch395_set_socket_send_buf(uint8_t sockindex, uint8_t startblk, uint8_t blknum)
{ch395_write_cmd(CMD30_SET_SEND_BUF);ch395_write_data(sockindex);ch395_write_data(startblk);ch395_write_data(blknum);
} do{g_ch395q_sta.phy_status = ch395_cmd_get_phy_status(); /* 获取PHY状态 */ g_ch395q_sta.ch395_phy_cb(g_ch395q_sta.phy_status); /* 判断双工和网速模式 */ }while(g_ch395q_sta.phy_status == PHY_DISCONN);首先对phy的状态进行获取,接下来phy状态回调函数检测phy的状态,如果断开就一致检测
g_ch395q_sta.version = ch395_cmd_get_ver(); /* 获取版本 */printf("CH395VER : %2x\r\n", (uint16_t)g_ch395q_sta.version);连接成功就对395Q的固件库版本进行检测并进行打印。
i = ch395_dhcp_enable(1); /* 开启DHCP */g_ch395q_sta.ch395_error(i); /*** @brief 启动/停止dhcp* @param flag:0 / 1, 具体含义如下:* @arg 1:启动dhcp* @arg 0:停止dhcp* @retval 执行状态*/
uint8_t ch395_dhcp_enable(uint8_t flag)
{uint8_t i = 0;uint8_t s;ch395_write_cmd(CMD10_DHCP_ENABLE);ch395_write_data(flag);ch395_scs_hign;while (1){delay_ms(20);s = ch395_get_cmd_status(); /* 不能过于频繁查询 */if (s != CH395_ERR_BUSY){break; /* 如果ch395芯片返回忙状态 */}if (i++ > 200){return CH395_ERR_UNKNOW; /* 超时退出 */}}return s;
}
启动dhcp,如果启动失败就对错误值进行打印。
2.2.3 void ch395_demo(void) 例程测试
接下来对测试例程进行分析
/*** @brief 例程测试* @param 无* @retval 无*/
void ch395_demo(void)
{ch395_show_mesg(); /* 显示信息 */do{if (ch395_int_pin_wire == 0) /*判断INT这个引脚是否处于低 低则有异常状态发生*/{ch395q_handler(); /* 中断处理函数 */}}while (g_ch395q_sta.dhcp_status == DHCP_STA); /* 获取DHCP */while(1){ch395q_handler();}
}第一句是加了个打印这个不看
下来进来先判断int的引脚,判断INT这个引脚是否处于低 低则有异常状态发生,则进入ch395q_handler()函数,该函数为CH395全局管理函数,该函数实现为
/*** @brief CH395全局管理函数* @param 无* @retval 无*/
void ch395q_handler(void)
{if (ch395_int_pin_wire == 0){ch395_interrupt_handler(); /* 中断处理函数 */}g_ch395q_sta.ch395_reconnection(); /* 检测PHY状态,并重新连接 */
}首先是又判断了一下int引脚,如果为低,则进入异常中断处理函数ch395_interrupt_handler(); 该函数实现为
/*** @brief CH395全局中断函数* @param 无* @retval 无*/
void ch395_interrupt_handler(void)
{uint16_t init_status;uint8_t i;init_status = ch395_cmd_get_glob_int_status_all();if (init_status & GINT_STAT_UNREACH) /* 不可达中断,读取不可达信息 */{ch395_cmd_get_unreachippt(g_ch395q_sta.ipinf_buf);}if (init_status & GINT_STAT_IP_CONFLI) /* 产生IP冲突中断,建议重新修改CH395的 IP,并初始化CH395 */{}if (init_status & GINT_STAT_PHY_CHANGE) /* 产生PHY改变中断 */{g_ch395q_sta.phy_status = ch395_cmd_get_phy_status(); /* 获取PHY状态 */}if (init_status & GINT_STAT_DHCP) /* 处理DHCP中断 */{i = ch395_get_dhcp_status();switch (i){case DHCP_UP:ch395_get_ipinf(g_ch395q_sta.ipinf_buf);printf("IP:%02d.%02d.%02d.%02d\r\n", (uint16_t)g_ch395q_sta.ipinf_buf[0], (uint16_t)g_ch395q_sta.ipinf_buf[1], (uint16_t)g_ch395q_sta.ipinf_buf[2], (uint16_t)g_ch395q_sta.ipinf_buf[3]);printf("GWIP:%02d.%02d.%02d.%02d\r\n", (uint16_t)g_ch395q_sta.ipinf_buf[4], (uint16_t)g_ch395q_sta.ipinf_buf[5], (uint16_t)g_ch395q_sta.ipinf_buf[6], (uint16_t)g_ch395q_sta.ipinf_buf[7]);printf("Mask:%02d.%02d.%02d.%02d\r\n", (uint16_t)g_ch395q_sta.ipinf_buf[8], (uint16_t)g_ch395q_sta.ipinf_buf[9], (uint16_t)g_ch395q_sta.ipinf_buf[10], (uint16_t)g_ch395q_sta.ipinf_buf[11]);printf("DNS1:%02d.%02d.%02d.%02d\r\n", (uint16_t)g_ch395q_sta.ipinf_buf[12], (uint16_t)g_ch395q_sta.ipinf_buf[13], (uint16_t)g_ch395q_sta.ipinf_buf[14], (uint16_t)g_ch395q_sta.ipinf_buf[15]);printf("DNS2:%02d.%02d.%02d.%02d\r\n", (uint16_t)g_ch395q_sta.ipinf_buf[16], (uint16_t)g_ch395q_sta.ipinf_buf[17], (uint16_t)g_ch395q_sta.ipinf_buf[18], (uint16_t)g_ch395q_sta.ipinf_buf[19]);g_ch395q_sta.dhcp_status = DHCP_UP;break;default:g_ch395q_sta.dhcp_status = DHCP_DOWN;/* 设置默认IP地址信息 */printf("静态IP信息.....................................\r\n");break;}}if (init_status & GINT_STAT_SOCK0){ch395_socket_interrupt(CH395Q_SOCKET_0); /* 处理socket 0中断 */}if (init_status & GINT_STAT_SOCK1){ch395_socket_interrupt(CH395Q_SOCKET_1); /* 处理socket 1中断 */}if (init_status & GINT_STAT_SOCK2){ch395_socket_interrupt(CH395Q_SOCKET_2); /* 处理socket 2中断 */}if (init_status & GINT_STAT_SOCK3){ch395_socket_interrupt(CH395Q_SOCKET_3); /* 处理socket 3中断 */}if (init_status & GINT_STAT_SOCK4){ch395_socket_interrupt(CH395Q_SOCKET_4); /* 处理socket 4中断 */}if (init_status & GINT_STAT_SOCK5){ch395_socket_interrupt(CH395Q_SOCKET_5); /* 处理socket 5中断 */}if (init_status & GINT_STAT_SOCK6){ch395_socket_interrupt(CH395Q_SOCKET_6); /* 处理socket 6中断 */}if (init_status & GINT_STAT_SOCK7){ch395_socket_interrupt(CH395Q_SOCKET_7); /* 处理socket 7中断 */}
}
udp只有前面三个中断,后面时针对TCP/IP的,如果插拔网线之类的,就会进入产生PHY改变中断,那么 会获取PHY状态, 检测PHY状态,执行ch395_reconnection()并重新连接
/*** @brief 检测PHY状态,并重新连接* @param 无* @retval 无*/
void ch395_reconnection(void)
{for (uint8_t socket_index = CH395Q_SOCKET_0 ; socket_index <= CH395Q_SOCKET_7 ; socket_index ++ ){if (g_ch395q_sta.phy_status == PHY_DISCONN && (g_ch395q_sta.dhcp_status == DHCP_UP || g_ch395q_sta.dhcp_status == DHCP_DOWN || g_ch395q_sta.dhcp_status == DHCP_STA)){if (g_ch395q_sta.socket[socket_index].config.socket_enable == CH395Q_ENABLE){ch395_close_socket(g_ch395q_sta.socket[socket_index].config.socket_index); /*关闭socker接口*/g_ch395q_sta.ch395_error(ch395_dhcp_enable(0)); /*对DHCP进行失能*/ /* ch395q检测错误 */g_ch395q_sta.socket[socket_index].config.socket_enable = CH395Q_DISABLE; /*socket失能*/g_ch395q_sta.dhcp_status = DHCP_STA;/*这里可以加打印 比如网络断开等*/}}else/*下面是重连机制 比如网线重连*/{if (g_ch395q_sta.phy_status != PHY_DISCONN && g_ch395q_sta.socket[socket_index].config.socket_enable == CH395Q_DISABLE){if (g_ch395q_sta.dhcp_status == DHCP_STA) /*DHCP是否处于开启状态*/{ch395_cmd_reset(); /* 对ch395q复位 */delay_ms(100); /* 这里必须等待100以上延时 */ch395_cmd_init();delay_ms(100); /* 这里必须等待100以上延时 */ch395_socket_r_s_buf_modify();
// ch395_set_tcpmss(536);
// ch395_set_start_para(FUN_PARA_FLAG_TCP_SERVER | SOCK_CTRL_FLAG_SOCKET_CLOSE);g_ch395q_sta.ch395_error(ch395_dhcp_enable(1)); /* 开启DHCP */}do{if (ch395_int_pin_wire == 0){ch395_interrupt_handler(); /* 中断处理函数 */}}while (g_ch395q_sta.dhcp_status == DHCP_STA); /* 获取DHCP */switch(g_ch395q_sta.socket[socket_index].config.proto){case CH395Q_SOCKET_UDP:/* socket 为UDP模式 */ch395_set_socket_desip(socket_index, g_ch395q_sta.socket[socket_index].config.des_ip); /* 设置socket 0目标IP地址 */ch395_set_socket_prot_type(socket_index, PROTO_TYPE_UDP); /* 设置socket 0协议类型 */ch395_set_socket_desport(socket_index, g_ch395q_sta.socket[socket_index].config.des_port); /* 设置socket 0目的端口 */ch395_set_socket_sourport(socket_index, g_ch395q_sta.socket[socket_index].config.sour_port); /* 设置socket 0源端口 */g_ch395q_sta.ch395_error(ch395_open_socket(socket_index)); /* 检查是否成功 */break;case CH395Q_SOCKET_TCP_CLIENT:/* socket 为TCPClient模式 */ch395_keeplive_set(); /* 保活设置 */ch395_set_socket_desip(socket_index, g_ch395q_sta.socket[socket_index].config.des_ip); /* 设置socket 0目标IP地址 */ch395_set_socket_prot_type(socket_index, PROTO_TYPE_TCP); /* 设置socket 0协议类型 */ch395_set_socket_desport(socket_index,g_ch395q_sta.socket[socket_index].config.des_port); /* 设置socket 0目的端口 */ch395_set_socket_sourport(socket_index,g_ch395q_sta.socket[socket_index].config.sour_port); /* 设置socket 0源端口 */g_ch395q_sta.ch395_error(ch395_open_socket(socket_index)); /* 检查sokect是否打开成功 */g_ch395q_sta.ch395_error(ch395_tcp_connect(socket_index)); /* 检查tcp连接是否成功 */break;case CH395Q_SOCKET_TCP_SERVER:/* socket 为TCPServer模式 */ch395_set_socket_desip(socket_index, g_ch395q_sta.socket[socket_index].config.des_ip); /* 设置socket 0目标IP地址 */ch395_set_socket_prot_type(socket_index, PROTO_TYPE_TCP); /* 设置socket 0协议类型 */ch395_set_socket_sourport(socket_index, g_ch395q_sta.socket[socket_index].config.sour_port); /* 设置socket 0源端口 */g_ch395q_sta.ch395_error(ch395_open_socket(socket_index)); /* 检查sokect是否打开成功 */g_ch395q_sta.ch395_error(ch395_tcp_listen(socket_index)); /* 监听tcp连接 */break;case CH395Q_SOCKET_MAC_RAW:ch395_set_socket_prot_type(socket_index, PROTO_TYPE_MAC_RAW); /* 设置socket 0协议类型 */g_ch395q_sta.ch395_error(ch395_open_socket(socket_index)); /* 检查sokect是否打开成功 */break;default:ch395_set_socket_prot_type(socket_index, PROTO_TYPE_TCP);ch395_set_socket_sourport(socket_index, 8080); /* 设置socket 1~7源端口 */break;}g_ch395q_sta.socket[socket_index].config.socket_enable = CH395Q_ENABLE;}}}
}里面也比较简单,注释都在后面写着大家可以参考~
)



)

RDD基础、RDD常见算子)
-聚合函数的应用)
)

上)
学习笔记(四))

——Python文件操作)
)
)
)


)