
软件大小: 3.56 MB
软件版本: 3.3.30.180
软件类型:
系统补丁
查看详情
直接下载
win10系统是我们现在都在使用的系统,下面小编为大家在win10系统中无法启动defender防御软件的解决方法,希望可以帮助到你们。
解决方法:
1、根据该错误提示信息,我们首先怀疑的就是Windows Defender服务所对应的应用程序被第三方安全应用篡改。通过使用“Windows徽标键+R”打开运行窗口,输入“services.msc”;或者在命令提示符窗口中使用“tasklist /svc”命令,都可以查询到Windows Defender服务所实际对应的应用程序。
经过查询后我们可以看到,该服务所对应的应用程序路径为“C:Program FilesWindows DefenderMsMpEng.exe”,也无法通过点击启动来开启该服务,或者点击后显示运行,但仍不能正常使用,错误依旧。如图1所示

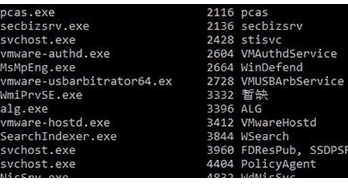
2、在“Windows Defender Service”服务项正常的电脑中,我们通过在命令提示符下使用“tasklist /svc”命令,查看服务以及程序对应项情况如下。其服务PID进程号为2664,对应的正是“MsMpEng.exe”文件。如图2所示
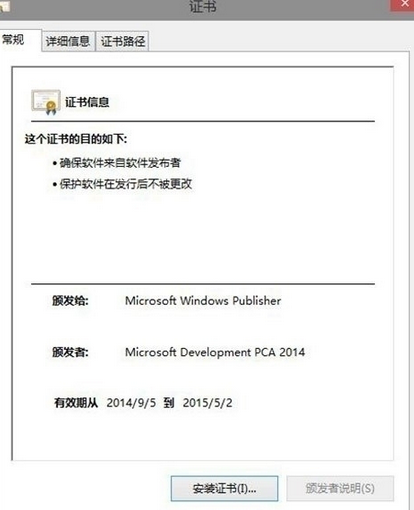
3、在找到对应的应用程序后,我们通过比对其与正常“MsMpEng.exe”文件的证书后,发现其并没有被篡改。如图3所示
4、Windows Defender原始文件没问题,却给出这样的错误提示,也无法通过正常的服务管理页面开启该服务。该问题很有可能就是目前Windows10操作系统的一个Bug。要解决该问题,请在“开始按钮”上单击鼠标右键,然后选择其中的“命令提示符(管理员)”,输入下列命令,然后按下“回车键”。如图4所示
“sc start WinDefend Enable” (不包含两侧的引号)

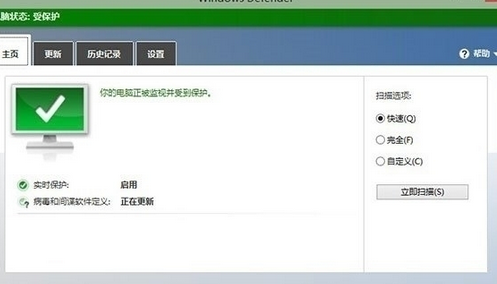
5、然后,再来看看之前提示错误的Windows Defender,已经可以正常开启了。如图5所示
以上就是在win10系统中无法启动defender防御软件的解决方法了,大家都学会了吗?
)

)


)




)








