这次我们将学会怎么使用pcl::MomentOfInertiaEstimation 这个类来获取以惯性矩和偏心距为基础的描述器。这个类也能提取坐标对称和定向包围的方形盒子。但是记住导出的OBB不是最小可能性的盒子。
下面介绍了该种方法的特征提取方式。第一次先算出点云矩阵的协方差,计算它的特征值和特征向量。然后把特征向量进行归一化处理,并把它组成右手坐标系。每一步都会迭代一次。每一次迭代特征向量都会旋转。选转的顺序总是一样的,总是被别的特征向量执行。这提供了选择不变性。我们把这个旋转的主向量作为当前的坐标系。
对于每一个惯性矩都会被计算。此外,当前的坐标系还被用于偏心距的计算。出于这个原因,当前的向量被当成一个平面的法线向量同时点云被投射到这个向量上。对于这个投射,偏心距会被计算。
完成上述实现的类还提供了方法来获得AABB和OBB。旋转的方形盒子被当做AABB和特征向量一起计算。
下面是一段代码
#include <pcl/features/moment_of_inertia_estimation.h> #include <vector> #include <pcl/io/pcd_io.h> #include <pcl/point_types.h> #include <pcl/visualization/cloud_viewer.h> #include <boost/thread/thread.hpp> int main (int argc, char** argv) { if (argc != 2) return (0);boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("3D Viewer")); viewer->setBackgroundColor (0, 0, 0); viewer->addCoordinateSystem (1.0); viewer->initCameraParameters (); viewer->addPointCloud<pcl::PointXYZ> (cloud, "sample cloud"); viewer->addCube (min_point_AABB.x, max_point_AABB.x, min_point_AABB.y, max_point_AABB.y, min_point_AABB.z, max_point_AABB.z, 1.0, 1.0, 0.0, "AABB");pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ> ()); if (pcl::io::loadPCDFile (argv[1], *cloud) == -1) return (-1); pcl::MomentOfInertiaEstimation <pcl::PointXYZ> feature_extractor; feature_extractor.setInputCloud (cloud); feature_extractor.compute (); std::vector <float> moment_of_inertia; std::vector <float> eccentricity; pcl::PointXYZ min_point_AABB; pcl::PointXYZ max_point_AABB; pcl::PointXYZ min_point_OBB; pcl::PointXYZ max_point_OBB; pcl::PointXYZ position_OBB; Eigen::Matrix3f rotational_matrix_OBB; float major_value, middle_value, minor_value; Eigen::Vector3f major_vector, middle_vector, minor_vector; Eigen::Vector3f mass_center; feature_extractor.getMomentOfInertia (moment_of_inertia); feature_extractor.getEccentricity (eccentricity); feature_extractor.getAABB (min_point_AABB, max_point_AABB); feature_extractor.getOBB (min_point_OBB, max_point_OBB, position_OBB, rotational_matrix_OBB); feature_extractor.getEigenValues (major_value, middle_value, minor_value); feature_extractor.getEigenVectors (major_vector, middle_vector, minor_vector); feature_extractor.getMassCenter (mass_center); boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("3D Viewer")); viewer->setBackgroundColor (0, 0, 0); viewer->addCoordinateSystem (1.0); viewer->initCameraParameters (); viewer->addPointCloud<pcl::PointXYZ> (cloud, "sample cloud"); viewer->addCube (min_point_AABB.x, max_point_AABB.x, min_point_AABB.y, max_point_AABB.y, min_point_AABB.z, max_point_AABB.z, 1.0, 1.0, 0.0, "AABB"); Eigen::Vector3f position (position_OBB.x, position_OBB.y, position_OBB.z); Eigen::Quaternionf quat (rotational_matrix_OBB); viewer->addCube (position, quat, max_point_OBB.x - min_point_OBB.x, max_point_OBB.y - min_point_OBB.y, max_point_OBB.z - min_point_OBB.z, "OBB"); pcl::PointXYZ center (mass_center (0), mass_center (1), mass_center (2)); pcl::PointXYZ x_axis (major_vector (0) + mass_center (0), major_vector (1) + mass_center (1), major_vector (2) + mass_center (2)); pcl::PointXYZ y_axis (middle_vector (0) + mass_center (0), middle_vector (1) + mass_center (1), middle_vector (2) + mass_center (2)); pcl::PointXYZ z_axis (minor_vector (0) + mass_center (0), minor_vector (1) + mass_center (1), minor_vector (2) + mass_center (2)); viewer->addLine (center, x_axis, 1.0f, 0.0f, 0.0f, "major eigen vector"); viewer->addLine (center, y_axis, 0.0f, 1.0f, 0.0f, "middle eigen vector"); viewer->addLine (center, z_axis, 0.0f, 0.0f, 1.0f, "minor eigen vector"); //Eigen::Vector3f p1 (min_point_OBB.x, min_point_OBB.y, min_point_OBB.z); //Eigen::Vector3f p2 (min_point_OBB.x, min_point_OBB.y, max_point_OBB.z); //Eigen::Vector3f p3 (max_point_OBB.x, min_point_OBB.y, max_point_OBB.z); //Eigen::Vector3f p4 (max_point_OBB.x, min_point_OBB.y, min_point_OBB.z); //Eigen::Vector3f p5 (min_point_OBB.x, max_point_OBB.y, min_point_OBB.z); //Eigen::Vector3f p6 (min_point_OBB.x, max_point_OBB.y, max_point_OBB.z); //Eigen::Vector3f p7 (max_point_OBB.x, max_point_OBB.y, max_point_OBB.z); //Eigen::Vector3f p8 (max_point_OBB.x, max_point_OBB.y, min_point_OBB.z); //p1 = rotational_matrix_OBB * p1 + position; //p2 = rotational_matrix_OBB * p2 + position; //p3 = rotational_matrix_OBB * p3 + position; //p4 = rotational_matrix_OBB * p4 + position; //p5 = rotational_matrix_OBB * p5 + position; //p6 = rotational_matrix_OBB * p6 + position; //p7 = rotational_matrix_OBB * p7 + position; //p8 = rotational_matrix_OBB * p8 + position; //pcl::PointXYZ pt1 (p1 (0), p1 (1), p1 (2)); //pcl::PointXYZ pt2 (p2 (0), p2 (1), p2 (2)); //pcl::PointXYZ pt3 (p3 (0), p3 (1), p3 (2)); //pcl::PointXYZ pt4 (p4 (0), p4 (1), p4 (2)); //pcl::PointXYZ pt5 (p5 (0), p5 (1), p5 (2)); //pcl::PointXYZ pt6 (p6 (0), p6 (1), p6 (2)); //pcl::PointXYZ pt7 (p7 (0), p7 (1), p7 (2)); //pcl::PointXYZ pt8 (p8 (0), p8 (1), p8 (2)); //viewer->addLine (pt1, pt2, 1.0, 0.0, 0.0, "1 edge"); //viewer->addLine (pt1, pt4, 1.0, 0.0, 0.0, "2 edge"); //viewer->addLine (pt1, pt5, 1.0, 0.0, 0.0, "3 edge"); //viewer->addLine (pt5, pt6, 1.0, 0.0, 0.0, "4 edge"); //viewer->addLine (pt5, pt8, 1.0, 0.0, 0.0, "5 edge"); //viewer->addLine (pt2, pt6, 1.0, 0.0, 0.0, "6 edge"); //viewer->addLine (pt6, pt7, 1.0, 0.0, 0.0, "7 edge"); //viewer->addLine (pt7, pt8, 1.0, 0.0, 0.0, "8 edge"); //viewer->addLine (pt2, pt3, 1.0, 0.0, 0.0, "9 edge"); //viewer->addLine (pt4, pt8, 1.0, 0.0, 0.0, "10 edge"); //viewer->addLine (pt3, pt4, 1.0, 0.0, 0.0, "11 edge"); //viewer->addLine (pt3, pt7, 1.0, 0.0, 0.0, "12 edge"); while(!viewer->wasStopped()) { viewer->spinOnce (100); boost::this_thread::sleep (boost::posix_time::microseconds (100000)); } return (0);}
让我们来对此解释一下
pcl::MomentOfInertiaEstimation <pcl::PointXYZ> feature_extractor; feature_extractor.setInputCloud (cloud); feature_extractor.compute ();
上面的代码加载了点云文件
std::vector <float> moment_of_inertia; std::vector <float> eccentricity; pcl::PointXYZ min_point_AABB; pcl::PointXYZ max_point_AABB; pcl::PointXYZ min_point_OBB; pcl::PointXYZ max_point_OBB; pcl::PointXYZ position_OBB; Eigen::Matrix3f rotational_matrix_OBB; float major_value, middle_value, minor_value; Eigen::Vector3f major_vector, middle_vector, minor_vector; Eigen::Vector3f mass_center;
上面是 pcl::MomentOfInertiaEstimation这个类实例化的代码。
feature_extractor.getMomentOfInertia (moment_of_inertia); feature_extractor.getEccentricity (eccentricity); feature_extractor.getAABB (min_point_AABB, max_point_AABB); feature_extractor.getOBB (min_point_OBB, max_point_OBB, position_OBB, rotational_matrix_OBB); feature_extractor.getEigenValues (major_value, middle_value, minor_value); feature_extractor.getEigenVectors (major_vector, middle_vector, minor_vector); feature_extractor.getMassCenter (mass_center);
上面是我们声明所有需要用来存储描述器和方形盒子的变量。
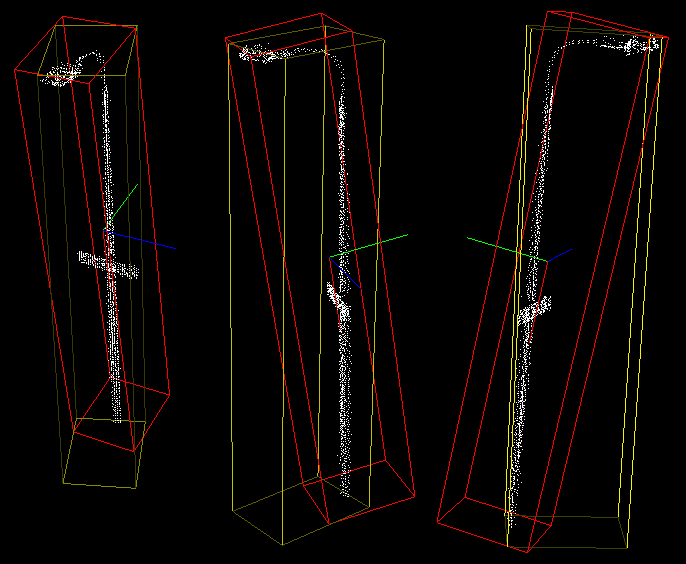
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("3D Viewer")); viewer->setBackgroundColor (0, 0, 0); viewer->addCoordinateSystem (1.0); viewer->initCameraParameters (); viewer->addPointCloud<pcl::PointXYZ> (cloud, "sample cloud"); viewer->addCube (min_point_AABB.x, max_point_AABB.x, min_point_AABB.y, max_point_AABB.y, min_point_AABB.z, max_point_AABB.z, 1.0, 1.0, 0.0, "AABB");
上面展示了怎么获取描述器和其它特征。
pcl::PointXYZ center (mass_center (0), mass_center (1), mass_center (2)); pcl::PointXYZ x_axis (major_vector (0) + mass_center (0), major_vector (1) + mass_center (1), major_vector (2) + mass_center (2)); pcl::PointXYZ y_axis (middle_vector (0) + mass_center (0), middle_vector (1) + mass_center (1), middle_vector (2) + mass_center (2)); pcl::PointXYZ z_axis (minor_vector (0) + mass_center (0), minor_vector (1) + mass_center (1), minor_vector (2) + mass_center (2)); viewer->addLine (center, x_axis, 1.0f, 0.0f, 0.0f, "major eigen vector"); viewer->addLine (center, y_axis, 0.0f, 1.0f, 0.0f, "middle eigen vector"); viewer->addLine (center, z_axis, 0.0f, 0.0f, 1.0f, "minor eigen vector");
上面简单的创建了PCLVisualizer这个类,并把点云和AABB加入到可视化里面。
//Eigen::Vector3f p1 (min_point_OBB.x, min_point_OBB.y, min_point_OBB.z); //Eigen::Vector3f p2 (min_point_OBB.x, min_point_OBB.y, max_point_OBB.z); //Eigen::Vector3f p3 (max_point_OBB.x, min_point_OBB.y, max_point_OBB.z); //Eigen::Vector3f p4 (max_point_OBB.x, min_point_OBB.y, min_point_OBB.z); //Eigen::Vector3f p5 (min_point_OBB.x, max_point_OBB.y, min_point_OBB.z); //Eigen::Vector3f p6 (min_point_OBB.x, max_point_OBB.y, max_point_OBB.z); //Eigen::Vector3f p7 (max_point_OBB.x, max_point_OBB.y, max_point_OBB.z); //Eigen::Vector3f p8 (max_point_OBB.x, max_point_OBB.y, min_point_OBB.z); //p1 = rotational_matrix_OBB * p1 + position; //p2 = rotational_matrix_OBB * p2 + position; //p3 = rotational_matrix_OBB * p3 + position; //p4 = rotational_matrix_OBB * p4 + position; //p5 = rotational_matrix_OBB * p5 + position; //p6 = rotational_matrix_OBB * p6 + position; //p7 = rotational_matrix_OBB * p7 + position; //p8 = rotational_matrix_OBB * p8 + position; //pcl::PointXYZ pt1 (p1 (0), p1 (1), p1 (2)); //pcl::PointXYZ pt2 (p2 (0), p2 (1), p2 (2)); //pcl::PointXYZ pt3 (p3 (0), p3 (1), p3 (2)); //pcl::PointXYZ pt4 (p4 (0), p4 (1), p4 (2)); //pcl::PointXYZ pt5 (p5 (0), p5 (1), p5 (2)); //pcl::PointXYZ pt6 (p6 (0), p6 (1), p6 (2)); //pcl::PointXYZ pt7 (p7 (0), p7 (1), p7 (2)); //pcl::PointXYZ pt8 (p8 (0), p8 (1), p8 (2)); //viewer->addLine (pt1, pt2, 1.0, 0.0, 0.0, "1 edge"); //viewer->addLine (pt1, pt4, 1.0, 0.0, 0.0, "2 edge"); //viewer->addLine (pt1, pt5, 1.0, 0.0, 0.0, "3 edge"); //viewer->addLine (pt5, pt6, 1.0, 0.0, 0.0, "4 edge"); //viewer->addLine (pt5, pt8, 1.0, 0.0, 0.0, "5 edge"); //viewer->addLine (pt2, pt6, 1.0, 0.0, 0.0, "6 edge"); //viewer->addLine (pt6, pt7, 1.0, 0.0, 0.0, "7 edge"); //viewer->addLine (pt7, pt8, 1.0, 0.0, 0.0, "8 edge"); //viewer->addLine (pt2, pt3, 1.0, 0.0, 0.0, "9 edge"); //viewer->addLine (pt4, pt8, 1.0, 0.0, 0.0, "10 edge"); //viewer->addLine (pt3, pt4, 1.0, 0.0, 0.0, "11 edge"); //viewer->addLine (pt3, pt7, 1.0, 0.0, 0.0, "12 edge");
上面是可以用来显示特征向量的代码。
这些大量的代码展示了选择的方形盒子是怎么工作的。记住你需要旋转OBB的每一个顶点。这个代码和PCLViser::addCube()方法一样。
然后运行代码
./moment_of_inertia lamppost.pcd

)

















