余秀玲 余秀娟
摘 要:随着科技的高速发展,人们对生活质量的要求越来越高,无人驾驶汽车已经被广为研发和试用,由此智能小车的快速发展也是在情理之中。通过对基于单片机的智能小车的硬件及软件设计分析,实现红外避障循迹功能,并给出程序系统框图加以分析,最后通过实践证明这一设计的可行性和可靠性。
关键词:AT89S52 单片机;智能小车;系统框图;红外避障;循迹
1 系统总体设计
2 系统的硬件设计与制作
在智能小车红外避障循迹系統的设计上,其硬件设计主要在电机模块和传感器模块等这两个部分的内容。
2.1 硬件的设计
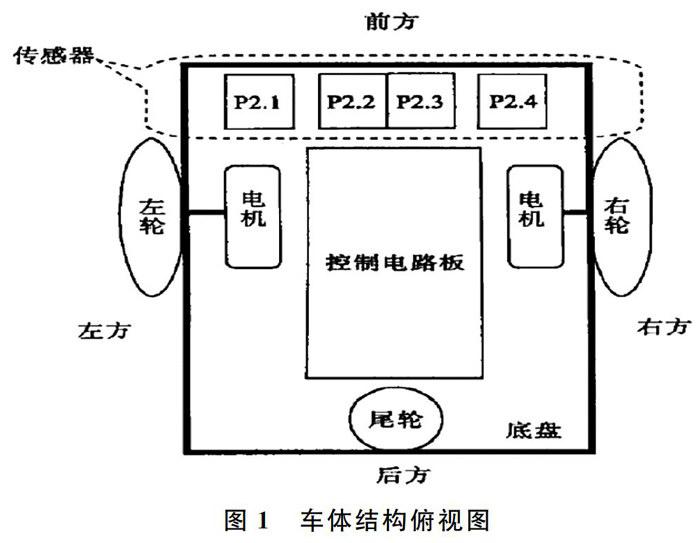
硬件的设计主要体现在电机和传感器的选择上,在电机设计上采取360度伺服舵机,可以实现连续的速度与位移控制,且其本身存在分别负责伺服舵机的电源、接地、信号控制的红、黑、白三条输入线,还存在基准电路及比较器。这一结构可以更好地实现智能小车的控制。传感器的设计上选择了QTI红外传感器,通过接受不同的反射光强度 ,实现对不同颜色物体的探测 ,且探测QTI传感器能够自动输出不同的电平信号,为智能小车避障的实现提供了有力的保障。
2.2 硬件的制作
硬件的制作主要介绍电路板的焊制及焊制方法,为智能小车的功能实现提供坚实的基础。
2.2.1 电路板的焊制
电路板的焊制优劣直接影响到成果的效果展示,电路板的焊接内容主要是焊接电阻、电容、发光二极管、晶振、三极管、STM32、USB、三端稳压、电机驱动。
2.2.2 元件的焊制方法
按照先焊一边再焊另一边的方法,先把焊锡丝放在焊盘的中间,放上电烙铁,焊锡丝融化后立马拿开焊锡丝,再拿开电烙铁,一定要注意焊锡的量不能过多也不能过少,一只手用镊子把贴片元件放平夹着,另一只手用电烙铁把焊盘上的焊锡融化,马上把贴片元件的一端推到焊锡处,再把元件的另一端焊盘焊上少量焊锡,推到元件的一端处。由于元件种类较多,一般按照元件的大小从小到大的顺序焊接。焊接完成后就可以进行组装,组装完毕后,组装过程中,要注意电源的正负极,不可接反。
3 系统软件的设计
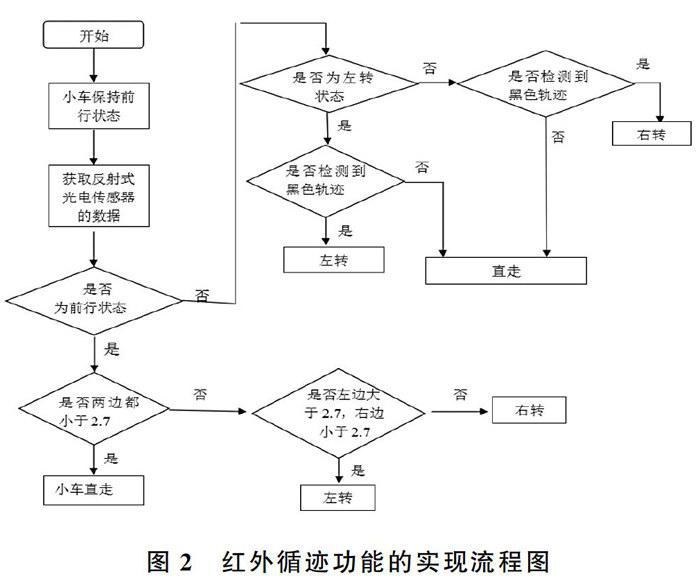
智能小车软件的设计也是系统设计的重要组成部分,主要由C语言实现,通过编程实现避障与循迹功能。在此,用系统框图的形式介绍软件的设计。
3.1 红外循迹功能的实现
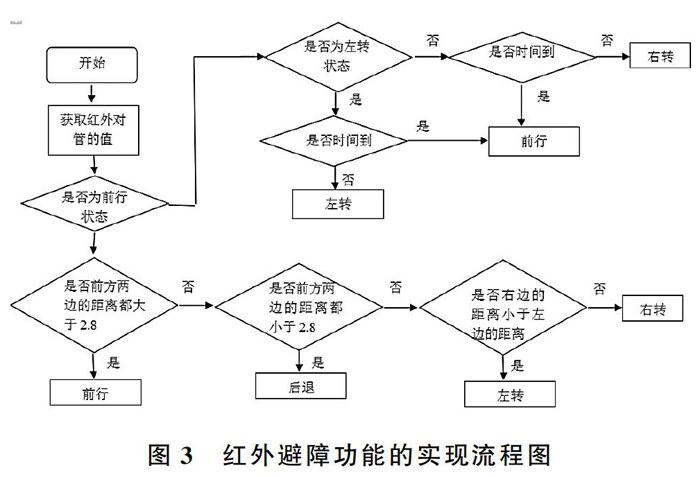
3.2 红外避障功能的实现
4 结论
本文论述了基于单片机的智能小车的硬件制作设计及软件的设计分析,这一设计在实践中取得了较为理想的结果,小车运行灵活,稳定可靠,识别能力较强,完美的实现了避障循迹功能,但也存在一些问题,小车转弯时会出现抖动比较厉害的情况,应该适当改变程序中的参数或适当改变QTI传感器的安装高度,所以仍然需要继续创新与实践!
参考文献
[1]陈海洋,李东京.基于单片机的智能循迹避障机器人小车设计[J].科技风,2014.
[2]钱栢霆,李娟.基于单片机的循迹避障智能小车系统的设计[J].电子制作,2015.
[3]寸巧萍.基于Mega16单片机的智能小车循迹避障设计方案[J].电子技术与软件工程,2015.
[4]周生远,王浩,于汇鑫.基于单片机的智能小车避障循迹系统设计[J].科技传播,2017.

(C语言))


》——第1章 搜索:反映认知、连接商务)



布局+实现篇)







)


