matlab版本有2015a 或更新的本
1.预先拍摄好多幅标定板图像
像这样:
分别将左右图像放在left和right文件夹中。
2.相机标定
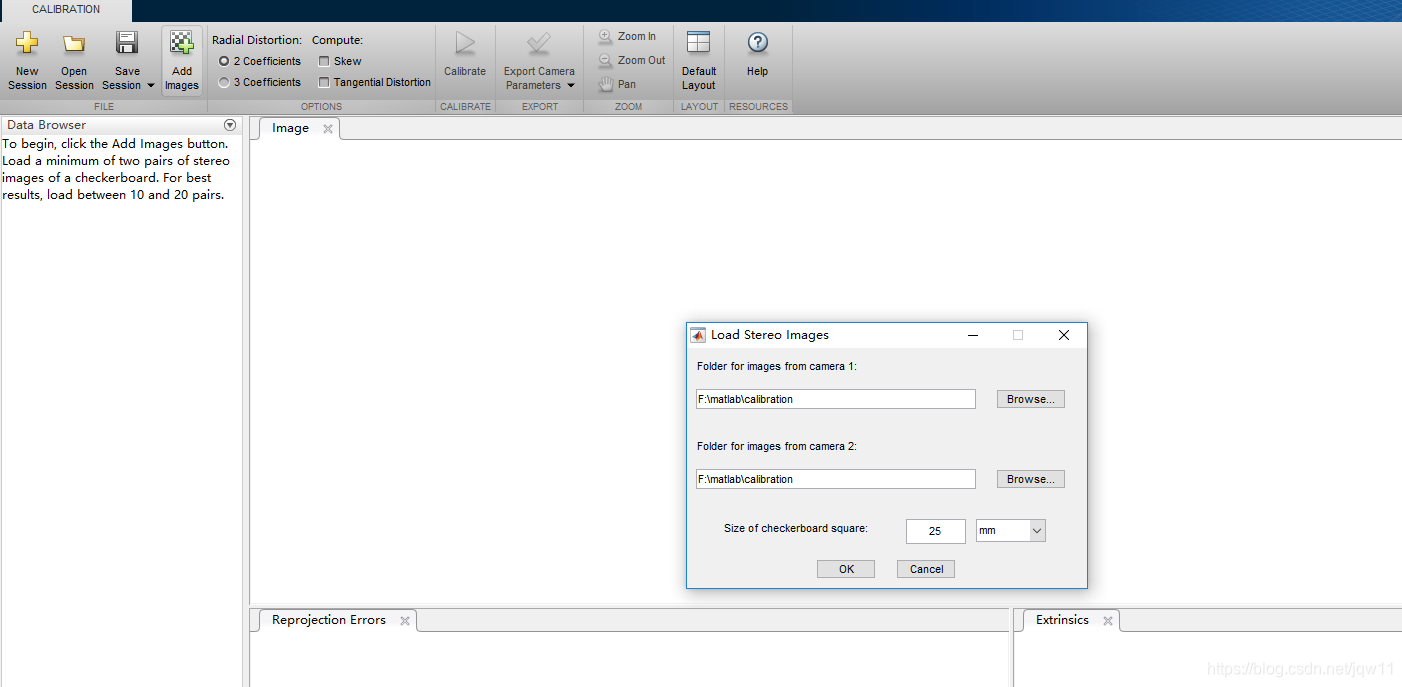
选择APPS,下拉菜单选择"stereo camera calibration"


进入一下界面,点击“add image”,分别设置camera1 (left)和camera2(right)的拍摄的图像,需要设置棋盘格的大小单位为毫米。
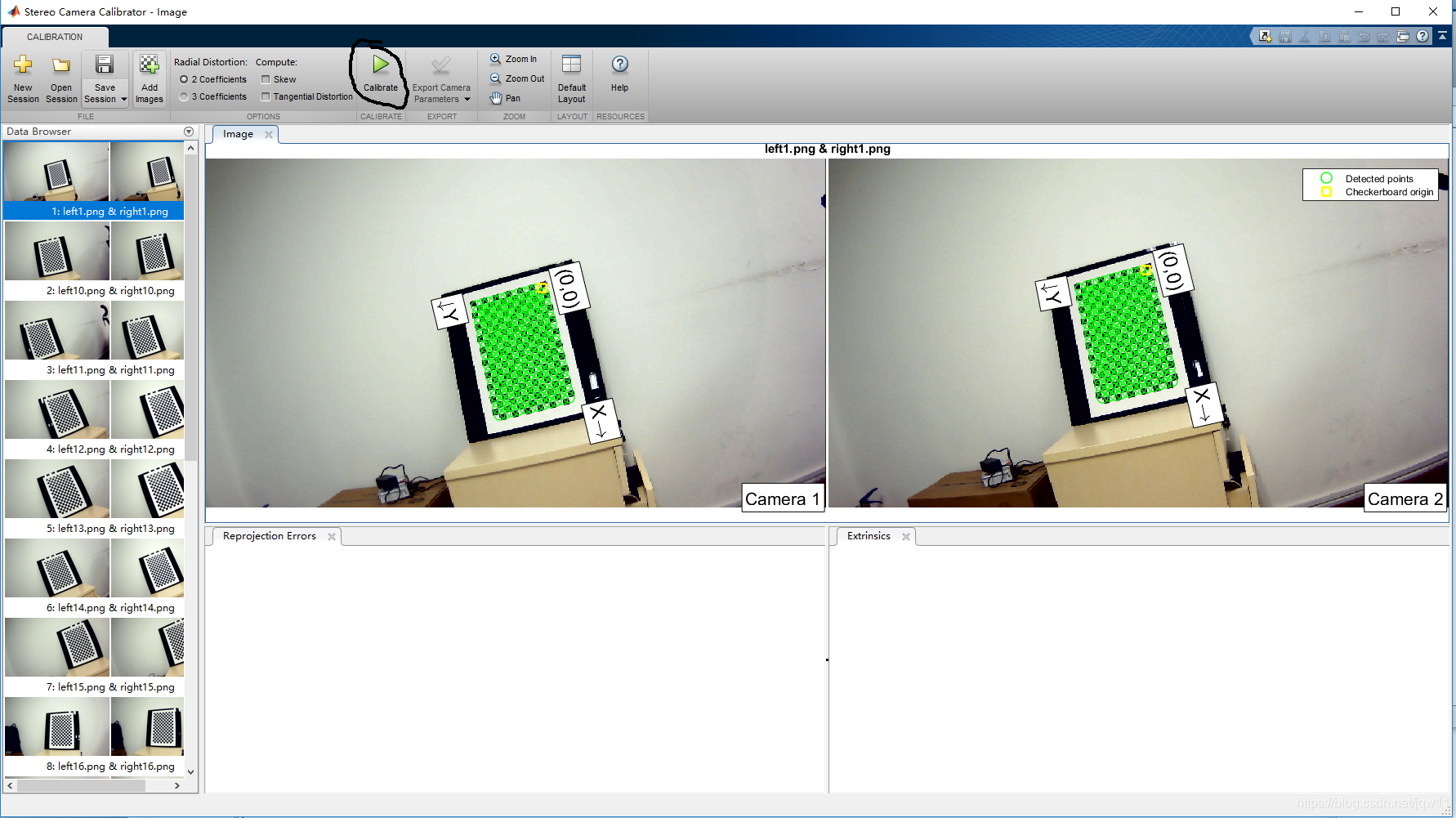
设置完进入一下界面,点击“calibrate”
点击export camera parameters 输出标定参数
在命令行输入以下命令保存参数:
save stereoParams
3.利用标定的参数矫正图像
load stereoParams_uvc
mkdir indoor_r
figure
for i = 1:100fprintf('processing: %d\n',i)leftname = ['./indoorScene/left', num2str(i), '.png'];rightname = ['./indoorScene/right', num2str(i), '.png'];I1 = imread(leftname);I2 = imread(rightname);[J1, J2] = rectifyStereoImages(I1, I2, stereoParams_uvc);leftname_r = ['./indoor_r/left',num2str(i),'.png'];rightname_r = ['./indoor_r/right', num2str(i), '.png'];imwrite(J1,leftname_r);imwrite(J2,rightname_r );imshow(stereoAnaglyph(J1,J2));
end



)


 异常解决)




 from device: CUDA_ERROR_OUT_OF_MEMORY: out of memory)







