一、最优化与深度学习
1.1、训练误差与泛化误差

1.2、经验风险

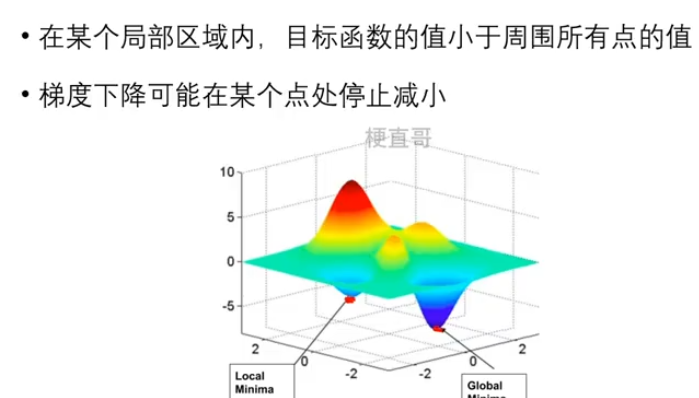
1.3、优化中的挑战

1.3.1、局部最小值
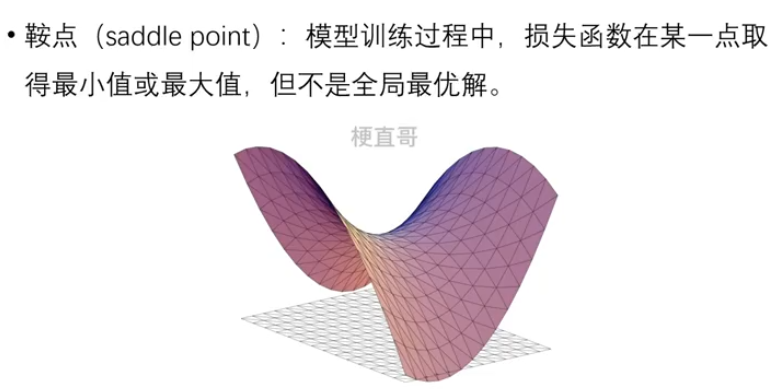
1.3.2、 鞍点
经常是由于模型复杂度过高或者训练样本数据过少造成的 —— Overfitting
1.3.3、悬崖

1.3.4、长期依赖问题

二、损失函数
2.1、损失函数的起源
- 损失函数(loss function):衡量预测值和真实值之间差异的函数
- 损失函数的起源可以追溯到统计学和最小二乘法
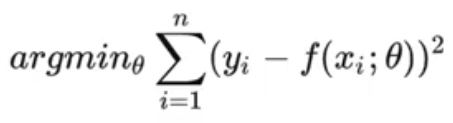
2.2、基础
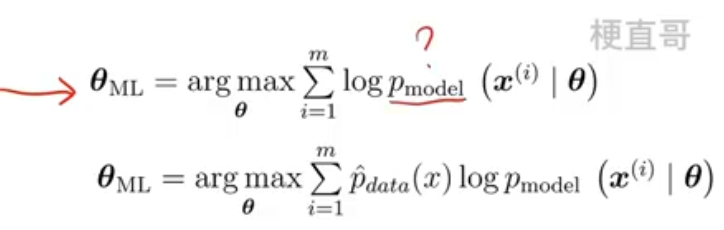
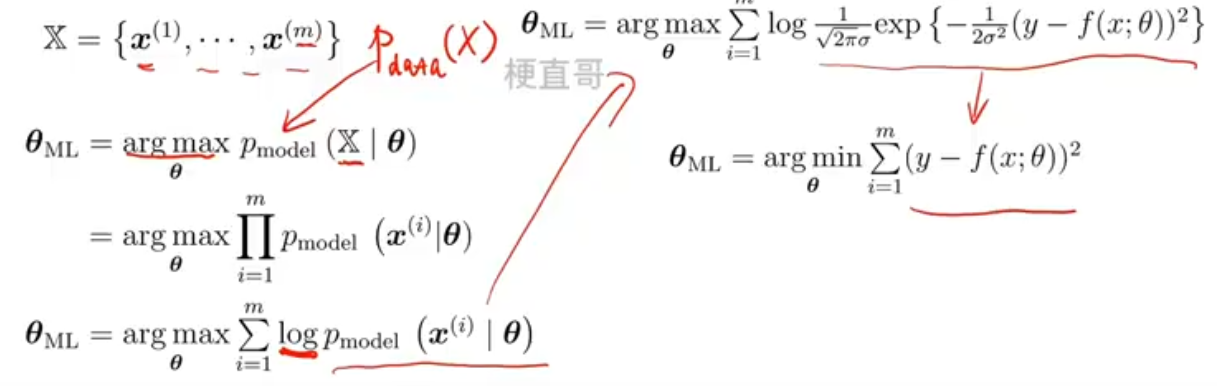
- 最大似然估计 Maximum Likelihood Estimation,MLE
- 假定X服从p model
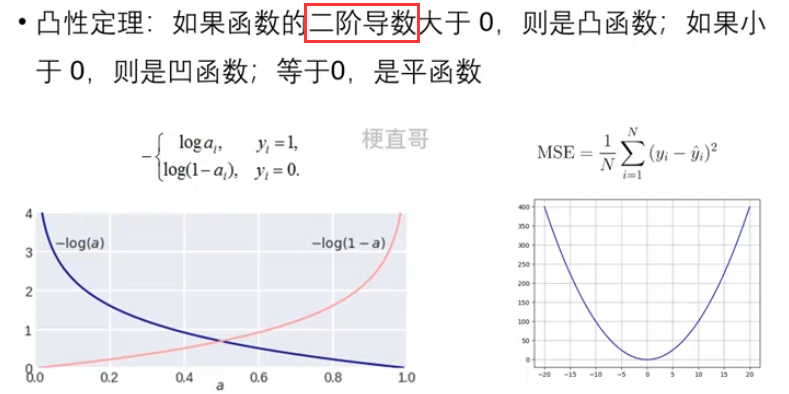
- 若p(似然函数)为高斯分布,MLE即为最小化均方误差MSE
- 交叉嫡损失概率分布解释 Cross Entropy
- 交叉嫡损失从概率分布角度来说,也是最大似然估计MLE
- 若我们不知道p model或者他不是高斯分布,此时我们可以通过训练样本的出现概率来估计,相当于缩放了上面的函数,此公式即交叉熵损失的定义
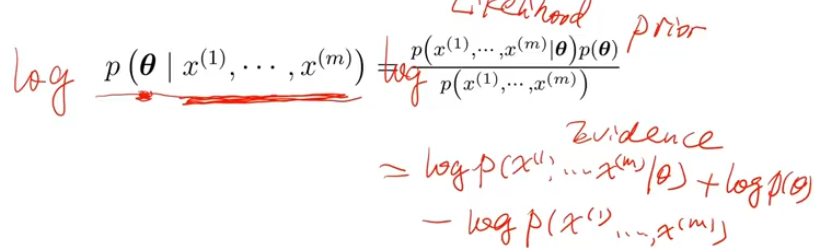
- 最大化后验 Maximum A Posteriori
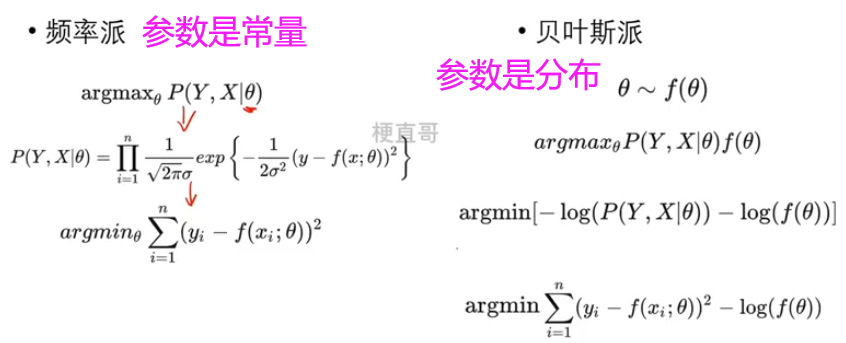
- L2正则化 —— 先验为高斯分布
- L1正则化 —— 先验为拉普拉斯分布
- 贝叶斯估计 Bayesian Estimation
- 频率派的人认为数据是含有参数的随机变量
- 贝叶斯派认为数据是被直接观测到的,因此不是随机的
2.3、损失函数的性质
- 可微性(differentiability) ︰函数在任意一点处都有一个导数
- 可导性(continuity) ︰函数有连续的导函数
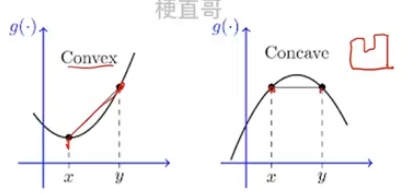
- 凸函数保证损失函数有全局最小值,可以用较简单优化算法
- 凹函数则需要使用更复杂的优化算法找最小值
- 如何判断函数凸性?
- 凸约束和凸优化

- 凸约束可以将非凸问题转化成凸优化问题。
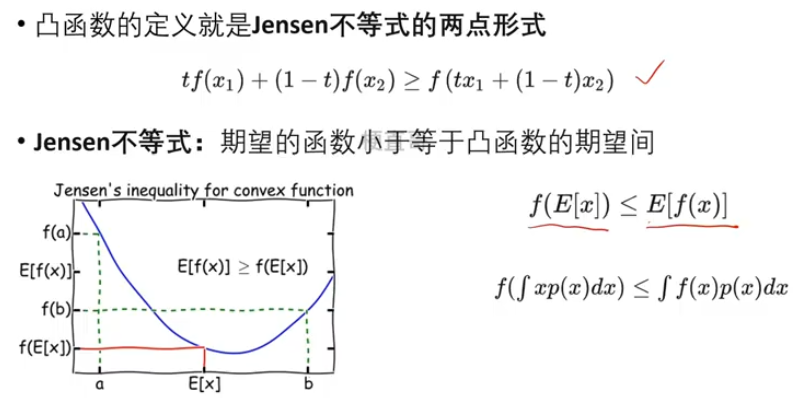
- Jensen不等式

三、梯度下降
3.1、搜索逼近策略
先确定方向:梯度 再确定步长:学习率

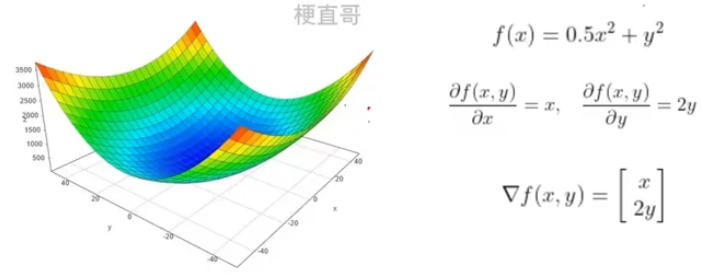
3.2、梯度
梯度就是函数曲面的陡度,偏导数是某个具体方向上的陡度
梯度就等于所有方向上偏导数的向量和
3.3、学习率
学习率太小,收敛慢
学习率太大,不收敛
3.4、梯度下降法 —— 初始值、梯度、学习率
① 确定起始点
②计算![]()
③控制好油门 (学习率)~
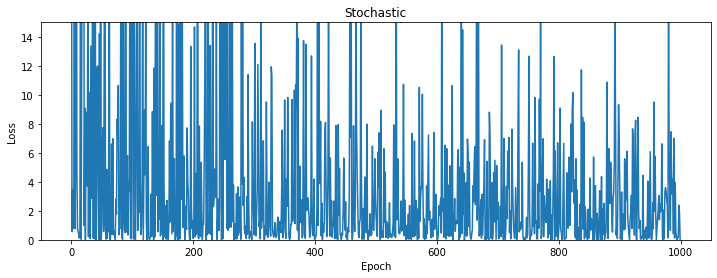
四、随机梯度下降法(Stochastic Gradient Descent)
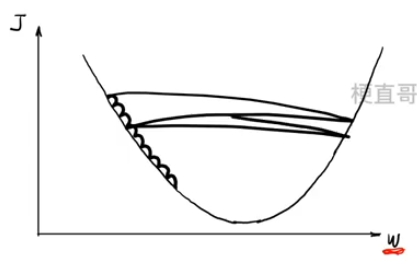
4.1、梯度下降法的问题
- ·不能保证被优化函数达到全局最优解
- ·全部训练数据上最小化损失,计算时间太长
- ·如果函数形态复杂,可能会在局部最小值附近来回震荡·对于初始值的选择非常敏感

4.2、SGD基本思想
- ·每次迭代中仅使用一个样本来计算梯度
- ·根据梯度来调整参数的值


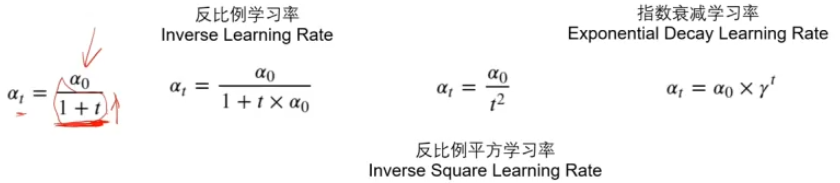
4.3、动态学习率
使用动态学习率可以帮助模型更快地收敛
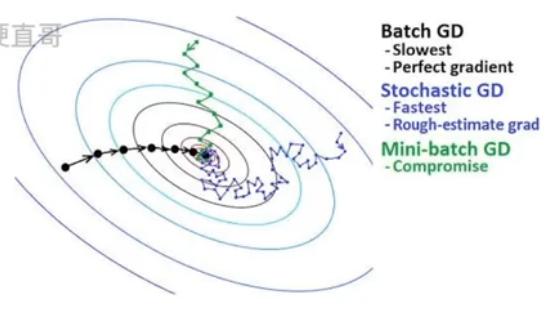
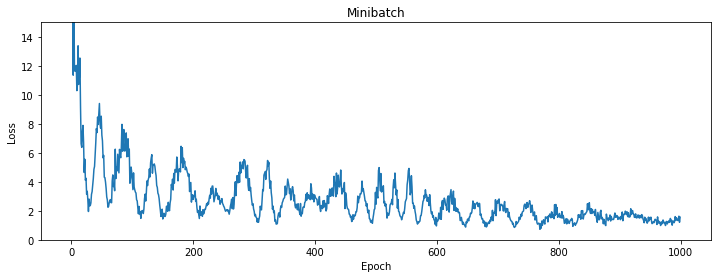
五、小批量梯度下降法(Mini-Batch Stochastic Gradient Descent)
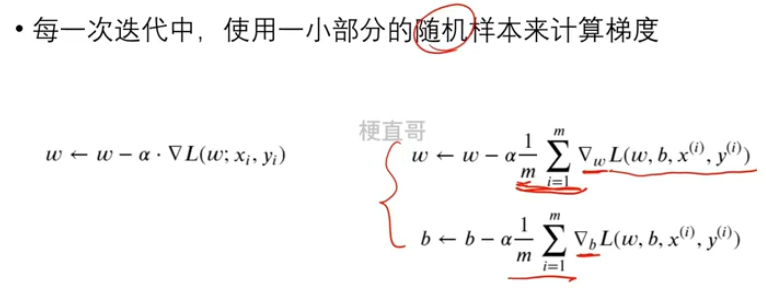

决定批量大小的因素
- 过大的批量虽然使得梯度估计更精确,但回报小
- 太小的批量难以充分利用多核架构
- 并行处理下,内存消耗和批量大小成正比
- 2的幂次方在使用GPU时可以提高效率,故取值32-256之间
- 注意:随机抽取
差别:
代码实现:
import torch
import torch.nn as nn
import numpy as np
import matplotlib.pyplot as plt
from tqdm import *# 定义模型和损失函数
class Model(nn.Module):def __init__(self):super().__init__()self.hidden1 = nn.Linear(1, 32)self.hidden2 = nn.Linear(32, 32)self.output = nn.Linear(32, 1)def forward(self, x):x = torch.relu(self.hidden1(x))x = torch.relu(self.hidden2(x))return self.output(x)
loss_fn = nn.MSELoss()# 生成随机数据
np.random.seed(0)
n_samples = 1000
x = np.linspace(-5, 5, n_samples)
y = 0.3 * (x ** 2) + np.random.randn(n_samples)# 转换为Tensor
x = torch.unsqueeze(torch.from_numpy(x).float(), 1)
y = torch.unsqueeze(torch.from_numpy(y).float(), 1)# 将数据封装为数据集
dataset = torch.utils.data.TensorDataset(x, y)names = ["Batch", "Stochastic", "Minibatch"] # 批量梯度下降法、随机梯度下降法、小批量梯度下降法
batch_size = [n_samples, 1, 128]
momentum= [1,0,1]
losses = [[], [], []]# 超参数
learning_rate = 0.0001
n_epochs = 1000# 分别训练
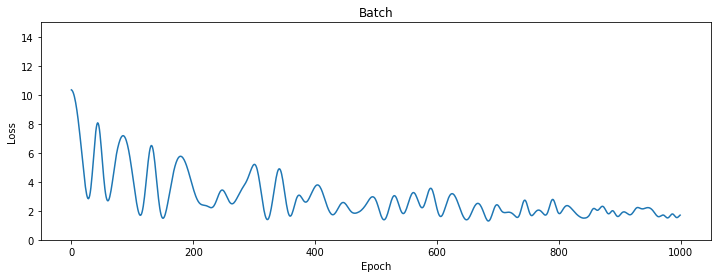
for i in range(3):model = Model()optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate, momentum=momentum[i])dataloader = torch.utils.data.DataLoader(dataset, batch_size=batch_size[i], shuffle=True)for epoch in tqdm(range(n_epochs), desc=names[i], leave=True, unit=' epoch'):x, y = next(iter(dataloader))optimizer.zero_grad()out = model(x)loss = loss_fn(out, y)loss.backward()optimizer.step()losses[i].append(loss.item())# 使用 Matplotlib 绘制损失值的变化趋势
for i, loss_list in enumerate(losses):plt.figure(figsize=(12, 4))plt.plot(loss_list)plt.ylim((0, 15))plt.xlabel('Epoch')plt.ylabel('Loss')plt.title(names[i])plt.show()Batch: 100%|██████████| 1000/1000 [00:07<00:00, 129.91 epoch/s] Stochastic: 100%|██████████| 1000/1000 [00:00<00:00, 2397.32 epoch/s] Minibatch: 100%|██████████| 1000/1000 [00:01<00:00, 780.15 epoch/s]
六、动量法
6.1、物理学中的动量
动量指的是这个物体在它运动方向上保持运动的趋势。
动量是一个向量。
动量守恒定律:

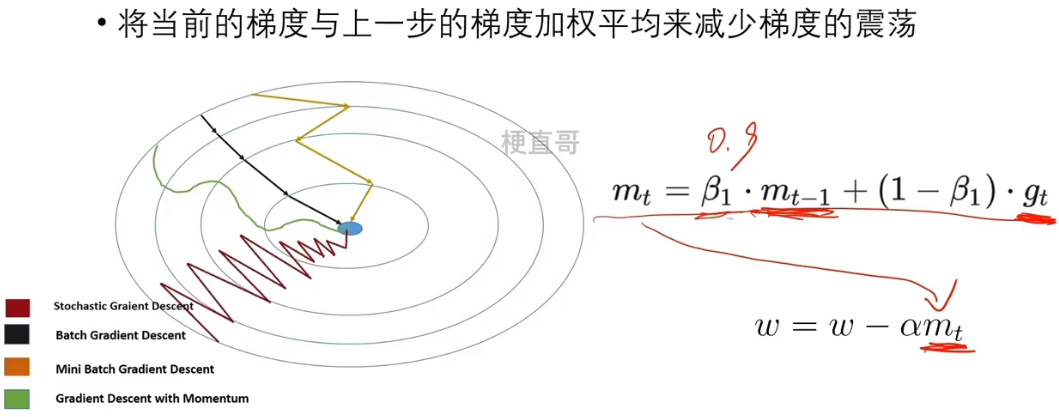
6.2、深度学习中的动量
一阶动量:过去各个时刻梯度的线性组合。
![]()
二阶动量:过去各个时刻梯度的平方的线性组合。

6.3、基本思想
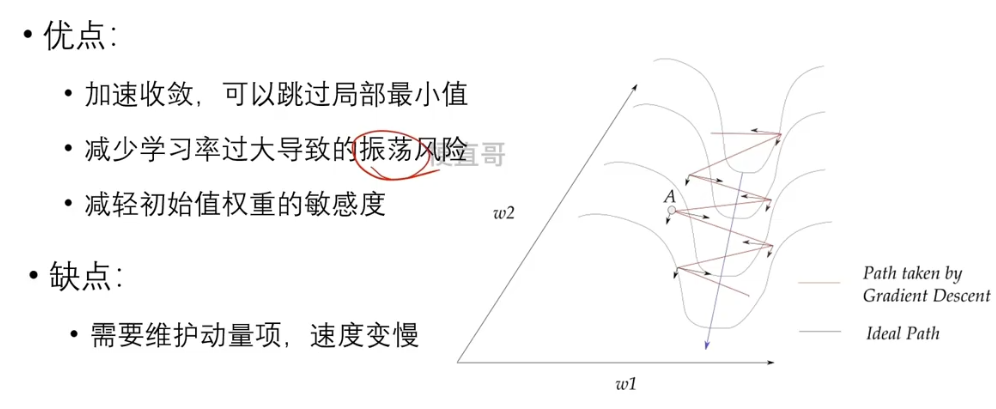
将当前的梯度与上一步的梯度加权平均来减少梯度的震荡。
6.4、优缺点
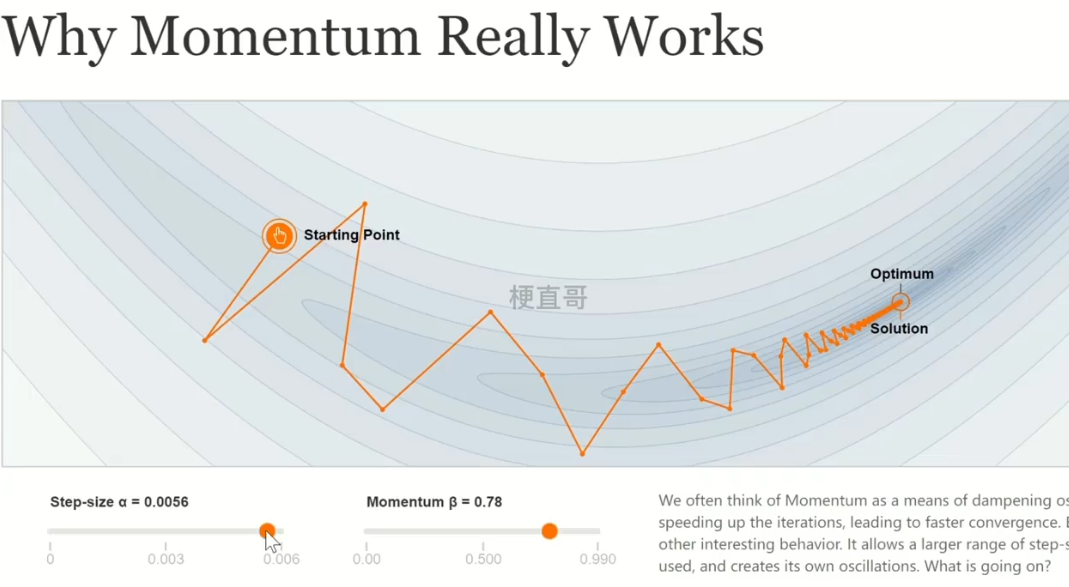
6.5、可视化网站:
七、AdaGrad算法
传统的SGD以及各种变种都是以同样的学习率来更新每个参数的,但是深度神经网络往往包含大量参数,而且这些参数并不总是用得到的。对于经常更新的参数,我们已经积累了大量知识,就不希望被新的样本影响太大,换句话说,就是对于更新很频繁的参数 可以将学习率慢一些。
而对于更新慢的参数,我们了解到的信息太少,希望从每一个偶然出现的样本多学一些,也就是学习率大一些,
那怎么动态的度量历史更新的频率呢?
———— 二阶动量
7.1、基本思想
根据二阶动量动态调整学习率。
gτ 为历史梯度值。有平方可以把正负去掉,累加。

7.2、算法流程
1、计算 目标函数 关于当前参数的 梯度 gt,根据历史梯度计算 一阶动量 mt 和 二阶动量 vt
2、计算当前时刻的下降梯度 η ,其中 α 为学习率,一般为了避免分母为零,会加上一个平方项。

参数更新越频繁,二阶动量越大,学习率就越小。
3、进行梯度更新:

7.3、稀疏特征
指的是在很多样本中只有少数出现过的特征。
训练模型时,稀疏特征可能很少更新,导致训练不出理想结果。
7.4、优缺点

7.5、代码实现
import torch
import matplotlib.pyplot as plt# 假设我们有一个简单的线性回归模型
# y = w * x + b
# 其中 w 和 b 是需要学习的参数# 定义超参数
learning_rate = 0.01
num_epochs = 100# 随机生成训练数据
X = torch.randn(100, 1)
y = 2 * X + 3 + torch.randn(100, 1)# 初始化参数
w = torch.zeros(1, requires_grad=True)
b = torch.zeros(1, requires_grad=True)# 创建 Adagrad optimizer
optimizer = torch.optim.Adagrad([w, b], lr=learning_rate)# 记录每次迭代的 loss
losses = []# 训练模型
for epoch in range(num_epochs):# 计算预测值y_pred = w * X + b# 计算 lossloss = torch.mean((y_pred - y) ** 2)# 记录 losslosses.append(loss.item())# 清空上一步的梯度optimizer.zero_grad()# 计算梯度loss.backward()# 更新参数optimizer.step()# 可视化训练过程
plt.plot(losses)
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.show()
八、RMSProp / AdaDelta算法
两种对二阶动量进行优化的方法基本思想
时序累加修改二阶动量,动态调整学习率
RMSProp 2012年提出
AdaGrad单调递减的学习率变化过于激进,所以
改变二阶动量计算方法的策略:
不累积全部历史梯度,而只关注过去一段时间窗口的下降梯度。
β2 叫做衰减率系数。

优缺点
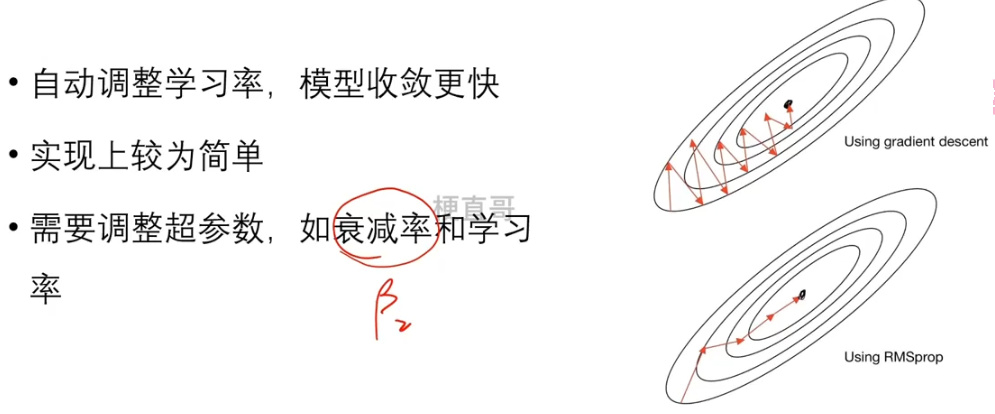
AdaDelta 2011年提出
避免使用手动调整学习率的方法来控制训练过程,而是自动调整学习率,
使得训练过程更加顺畅。
主要由两部分组成:
梯度的积分和更新的规则。
梯度积分:对梯度进行累加并记录

优缺点

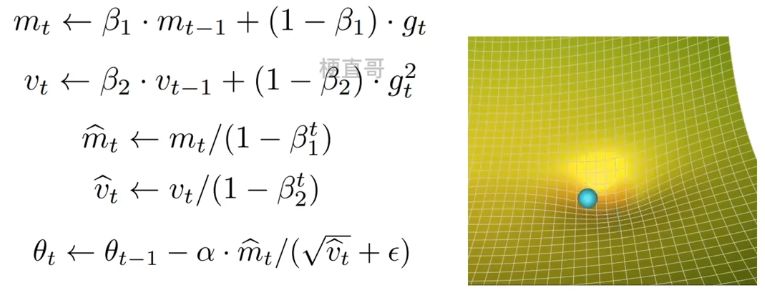
九、Adam算法 ***
9.1、基本思想
把一阶动量和二阶动量都用起来,Adaptive + Momentum
gt 当前时间步的梯度
mt 和 vt 一阶 二阶矩估计向量(一阶 二阶动量)
β1 β2 两个衰减率的超参数,一般取值 0.9/0.999
偏差校正即更新 mt 和 vt
更新 θt ,ε保证分母不会等于0
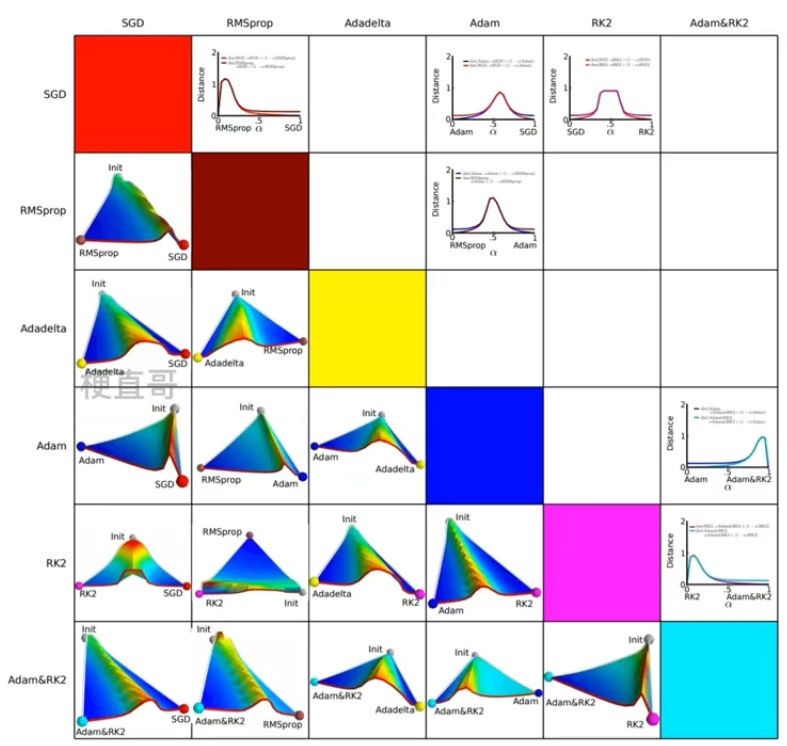
9.2、梯度下降法及其变体关系

9.3、原理框架流程
定义优化参数w,目标函数f(w),初始学习率 α
开始每个epoch迭代优化:
1、计算目标函数当前梯度
2、根据历史梯度计算一阶动量和二阶动量
3、计算当前时刻参数更新量
4、迭代更新权重参数
不同的优化算法为什么效果差这么多?
9.4、核心差异
区别在于下降方向。
前半部分是学习率(下降步长),后半部分是下降方向。
SGD的下降方向就是该位置梯度方向的反方向;
自适应学习率算法 RMSprop 为每个参数设定了不同的学习率,因此下降方向是缩放过的一阶动量的方向。

下图中,横坐标表示降维后的特征空间,区域的颜色表示目标函数值的变化。
9.5、最优选择策略讨论
不想做精细的调优,那么Adam;
更加自如地控制优化迭代的各类参数,那么SGD;
先用Adam快速下降,再用SGD调优;
算法美好,数据王道!

十、梯度下降代码实现
10.1 梯度下降过程
10.1.1、二维平面内的梯度下降
# 导入必要的库
import torch
import matplotlib.pyplot as plt# 定义函数
def f(x):return x ** 2 + 4 * x + 1# 定义初始值
x = torch.tensor(-10., requires_grad=True)# 迭代更新参数
learning_rate = 0.9# 用于记录每一步梯度下降的值
xs = []
ys = []# 开始迭代
for i in range(100):# 计算预测值和损失y = f(x)# 记录参数和损失xs.append(x.item())ys.append(y.item())# 反向传播求梯度y.backward()# 更新参数with torch.no_grad():x -= learning_rate * x.grad# 梯度清零x.grad.zero_()# 打印结果
print(f'最终参数值:{x.item()}')最终参数值:-2.000000238418579
# 显示真实的函数曲线
x_origin = torch.arange(-10, 10, 0.1)
y_origin = f(x_origin)
plt.plot(x_origin, y_origin,'b-')# 绘制搜索过程
plt.plot(xs,ys,'r--')
plt.scatter(xs, ys, s=50, c='r') # 圆点大小为 50,颜色为红色
plt.xlabel('x')
plt.ylabel('y')
plt.show()
10.1.2 三维平面内的梯度下降
# 定义函数
def f(x, y):return x ** 2 + 2* y ** 2# 定义初始值
x = torch.tensor(-10., requires_grad=True)
y = torch.tensor(-10., requires_grad=True)# 记录每一步的值
xs = []
ys = []
zs = []# 迭代更新参数
learning_rate = 0.1# 开始迭代
for i in range(100):# 计算预测值和损失z = f(x, y)# 记录参数和损失xs.append(x.item())ys.append(y.item())zs.append(z.item())# 反向传播z.backward()# 更新参数x.data -= learning_rate * x.grady.data -= learning_rate * y.grad# 清空梯度x.grad.zero_()y.grad.zero_()# 打印结果
print(f'最终参数值:x={x.item()}, y={y.item()}')最终参数值:x=-2.0370367614930274e-09, y=-6.533180924230175e-22
# 绘制图像
ax = plt.figure().add_subplot(projection='3d')
ax.plot(xs, ys, zs, 'r-')
ax.scatter(xs, ys, zs, s=50, c='r') # 圆点大小为 50,颜色为红色plt.show()
# 绘制原始的二维函数图像
X, Y = torch.meshgrid(torch.arange(-10, 10, 0.1), torch.arange(-10, 10, 0.1), indexing='ij')
Z = f(X, Y)
plt.contour(X, Y, Z, levels=30)# 绘制搜索过程曲线
plt.plot(xs, ys, 'r-')
plt.scatter(xs, ys, s=50, c='r') # 圆点大小为 50,颜色为红色
plt.show()
10.2. 不同优化器效果对比
# 导入必要的库
import torch.nn as nn
from torch.utils.data import DataLoader, TensorDataset # 用于构造数据加载器
from torch.utils.data import random_split # 用于划分数据集
import torch.optim as optim# 定义函数
def f(x, y):return x ** 2 + 2 * y ** 2# 定义初始值
num_samples = 1000 # 1000个样本点
X = torch.rand(num_samples) # 均匀分布
Y = torch.rand(num_samples) # 均匀分布
Z = f(X,Y) + torch.randn(num_samples) #高斯分布扰动项dataset = torch.stack([X, Y, Z], dim = 1)
dataset[0]tensor([0.3720, 0.4497, 1.0605])
# 按照8:2划分数据集
train_size = int(0.8 * len(dataset))
test_size = len(dataset) - train_sizetrain_dataset, test_dataset = random_split(dataset=dataset, lengths=[train_size, test_size])# 将数据封装成数据加载器
train_dataloader = DataLoader(TensorDataset(train_dataset.dataset.narrow(1,0,2), train_dataset.dataset.narrow(1,2,1)),batch_size=32, shuffle=False)
test_dataloader = DataLoader(TensorDataset(test_dataset.dataset.narrow(1,0,2), test_dataset.dataset.narrow(1,2,1)),batch_size=32, shuffle=False)# 定义一个简单模型
class Model(nn.Module):def __init__(self):super().__init__()self.hidden = nn.Linear(2, 8)self.output = nn.Linear(8, 1)def forward(self, x):x = torch.relu(self.hidden(x))return self.output(x)# 定义损失函数
loss_fn = nn.MSELoss()# 初始化模型序列
opt_labels = ['SGD', 'Momentum', 'Adagrad', 'RMSprop', 'Adadelta', 'Adam']
models = [Model(), Model(), Model(), Model(), Model(), Model()] # 优化器列表
SGD = optim.SGD(models[0].parameters(), lr=learning_rate)
Momentum = optim.SGD(models[1].parameters(), lr=learning_rate, momentum=0.8, nesterov=True)
Adagrad = optim.Adagrad(models[2].parameters(), lr=learning_rate)
RMSprop = optim.RMSprop(models[3].parameters(), lr=learning_rate)
Adadelta = optim.Adadelta(models[4].parameters(), lr=learning_rate)
Adam = optim.Adam(models[5].parameters(), lr=learning_rate)
opts = [SGD, Momentum, Adagrad, RMSprop, Adadelta, Adam]# 定义训练和测试误差历史记录数组
train_losses_his = [[],[],[],[],[],[]]
test_losses_his = [[],[],[],[],[],[]]# 超参数
num_epochs = 50
learning_rate = 0.01 # 学习率# 模型训练和测试
for epoch in range(num_epochs):# 当前epoch每个模型在训练集上的总损失列表train_losses = [0,0,0,0,0,0]# 遍历训练集for inputs, targets in train_dataloader:# 迭代不同的模型for index, model, optimizer, loss_history in zip(range(6), models, opts, train_losses_his):# 预测、损失函数、反向传播model.train()outputs = model(inputs)loss = loss_fn(outputs, targets)optimizer.zero_grad()loss.backward()optimizer.step()# 记录losstrain_losses[index] += loss.item()# 当前epoch每个模型在训测试集上的总损失列表test_losses = [0,0,0,0,0,0]# 在测试数据上评估,测试模型不计算梯度with torch.no_grad():# 遍历测试集for inputs, targets in test_dataloader:# 迭代不同的模型for index, model, optimizer, loss_history in zip(range(6), models, opts, test_losses_his):# 预测、损失函数、反向传播model.eval()outputs = model(inputs)loss = loss_fn(outputs, targets)test_losses[index] += loss.item()# 计算loss并记录到历史记录中for i in range(6):train_losses[i] /= len(train_dataloader)train_losses_his[i].append(train_losses[i])test_losses[i] /= len(test_dataloader)test_losses_his[i].append(test_losses[i])# 绘制训练集损失曲线
for i, l_his in enumerate(train_losses_his):plt.plot(l_his, label=opt_labels[i])
plt.legend(loc='best')
plt.xlabel('Epochs')
plt.ylabel('Loss')
plt.show()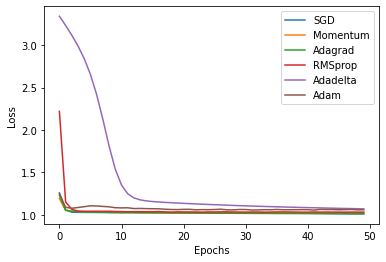
# 绘制测试集损失曲线
for i, l_his in enumerate(test_losses_his):plt.plot(l_his, label=opt_labels[i])
plt.legend(loc='best')
plt.xlabel('Epochs')
plt.ylabel('Loss')
plt.show()
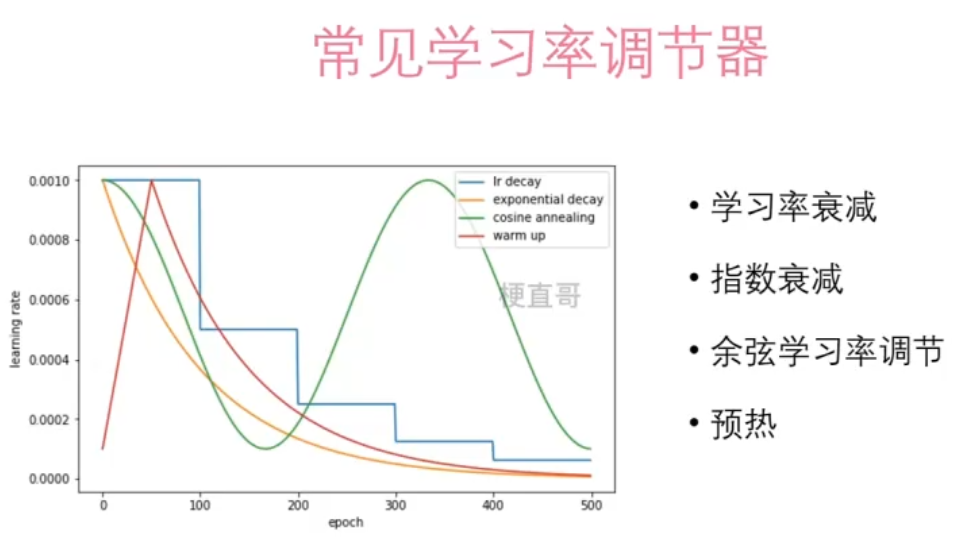
十一、学习率调节器
需要考虑的因素:

学习率是各类优化算法中的最关键的参数之一;
学习率调节器能够在训练过程中动态调整学习率。

11.2、代码实现
# 导入必要的库
import torch
import numpy as np
import matplotlib.pyplot as plt
import torch.nn as nn
from torch.utils.data import DataLoader, TensorDataset # 用于构造数据加载器
from torch.utils.data import random_split # 用于划分数据集11.2.1、数据生成
# 定义函数
def f(x, y):return x ** 2 + 2 * y ** 2# 定义初始值
num_samples = 1000 # 1000个样本点
X = torch.rand(num_samples) # 均匀分布
Y = torch.rand(num_samples) # 均匀分布
Z = f(X,Y) + 3 * torch.randn(num_samples)dataset = torch.stack([X, Y, Z], dim = 1)11.2.3、数据划分
# 按照7:3划分数据集
train_size = int(0.7 * len(dataset))
test_size = len(dataset) - train_sizetrain_dataset, test_dataset = random_split(dataset=dataset, lengths=[train_size, test_size])# 将数据封装成数据加载器
train_dataloader = DataLoader(TensorDataset(train_dataset.dataset.narrow(1,0,2), train_dataset.dataset.narrow(1,2,1)), batch_size=32)
test_dataloader = DataLoader(TensorDataset(test_dataset.dataset.narrow(1,0,2), test_dataset.dataset.narrow(1,2,1)), batch_size=32)11.2.4、模型定义
# 定义一个简单模型
class Model(nn.Module):def __init__(self):super().__init__()self.hidden = nn.Linear(2, 8)self.output = nn.Linear(8, 1)def forward(self, x):x = torch.relu(self.hidden(x))return self.output(x)11.2.5、模型训练对比
# 超参数
num_epochs = 100
learning_rate = 0.1 # 学习率,故意调大一些更直观# 定义损失函数
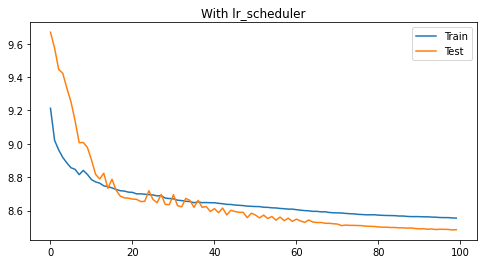
loss_fn = nn.MSELoss()# 通过一个训练对比有无学习率调节器的效果
for with_scheduler in [False, True]:# 定义训练和测试误差数组train_losses = []test_losses = []# 初始化模型model = Model()# 定义优化器optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate)# 定义学习率调节器scheduler = torch.optim.lr_scheduler.ExponentialLR(optimizer, gamma=0.99)# 迭代训练for epoch in range(num_epochs):# 在训练数据上迭代model.train()train_loss = 0# 遍历训练集for inputs, targets in train_dataloader:# 预测、损失函数、反向传播optimizer.zero_grad()outputs = model(inputs)loss = loss_fn(outputs, targets)loss.backward()optimizer.step()# 记录losstrain_loss += loss.item()# 计算loss并记录到训练误差train_loss /= len(train_dataloader)train_losses.append(train_loss)# 在测试数据上评估,测试模型不计算梯度model.eval()test_loss = 0with torch.no_grad():# 遍历测试集for inputs, targets in test_dataloader:# 预测、损失函数outputs = model(inputs)loss = loss_fn(outputs, targets)# 记录losstest_loss += loss.item()# 计算loss并记录到测试误差test_loss /= len(test_dataloader)test_losses.append(test_loss)# 是否更新学习率if with_scheduler:scheduler.step()# 绘制训练和测试误差曲线plt.figure(figsize=(8, 4))plt.plot(range(num_epochs), train_losses, label="Train")plt.plot(range(num_epochs), test_losses, label="Test")plt.title("{0} lr_scheduler".format("With" if with_scheduler else "Without"))plt.legend()
# plt.ylim((1, 2))plt.show()
11.2.6、常见学习率调节器
# 学习率衰减,例如每训练100次就将学习率降低为原来的一半
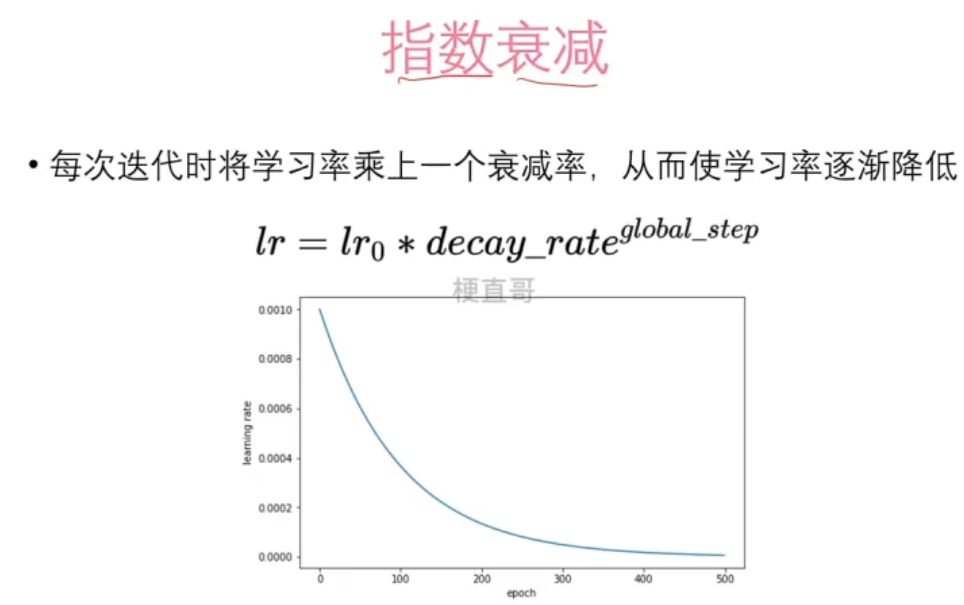
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=100, gamma=0.5)# 指数衰减法,每次迭代将学习率乘上一个衰减率
scheduler = torch.optim.lr_scheduler.ExponentialLR(optimizer, gamma=0.99)# 余弦学习率调节,optimizer初始学习率为最大学习率,eta_min是最小学习率,T_max是最大迭代次数
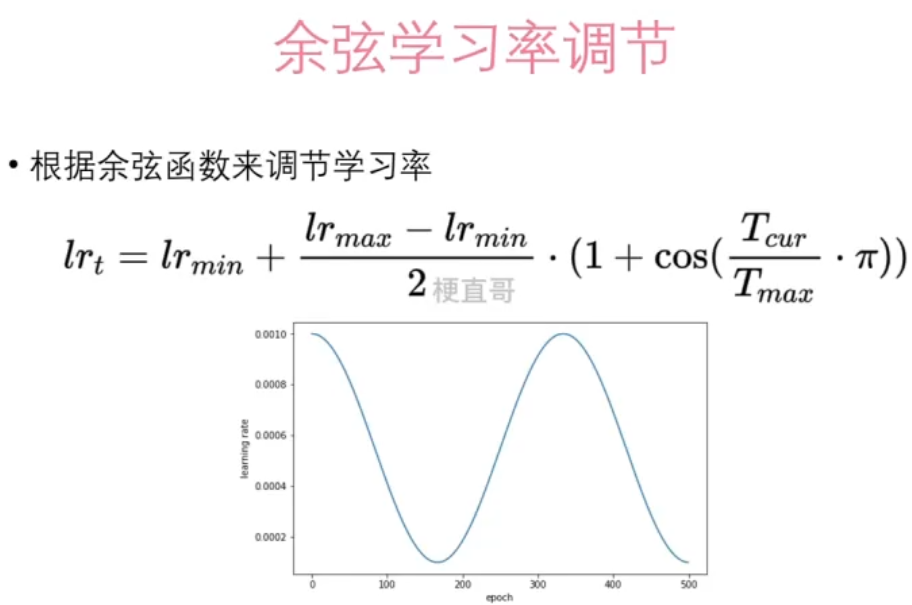
scheduler = torch.optim.lr_scheduler.CosineAnnealingLR(optimizer, T_max=100, eta_min=0.00001)# 自定义学习率,通过一个lambda函数实现自定义的学习率调节器
scheduler = torch.optim.lr_scheduler.LambdaLR(optimizer, lr_lambda=lambda epoch: 0.99 ** epoch)# 预热
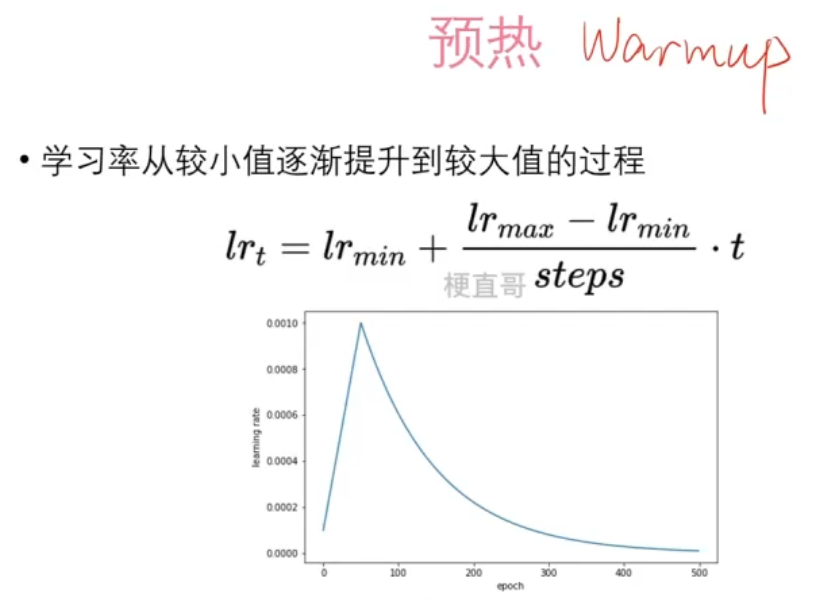
warmup_steps = 20
scheduler = torch.optim.lr_scheduler.LambdaLR(optimizer, lr_lambda=lambda t: min(t / warmup_steps, 0.001))
参考
深度学习必修课:进击算法工程师【梗直哥瞿炜】_哔哩哔哩_bilibili
Deep-Learning-Code: 《深度学习必修课:进击算法工程师》配套代码 - Gitee.com
)




:接口详解)





—— 算例制作:开闸式异重流(lock-exchange flow))







