1 概述
生活中经常要用到各种要求的证件照电子版,红底,蓝底,白底等,大部分情况我们只有其中一种,本文通过opencv实现证件照背景的颜色替换。
1.1 opencv介绍
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉和机器学习软件库。它最初由英特尔在1999年开发,后来由Willow Garage和Itseez(现为部分的Intel)维护。OpenCV旨在提供一个易于使用的计算机视觉基础设施,帮助人们实现复杂的视觉分析任务。
1.2 RGB介绍
RGB 是我们接触最多的颜色空间,由三个通道表示一幅图像,分别为红色(R),绿色(G)和蓝色(B)。这三种颜色的不同组合可以形成几乎所有的其他颜色。
RGB 颜色空间是图像处理中最基本、最常用、面向硬件的颜色空间,比较容易理解。RGB 颜色空间利用三个颜色分量的线性组合来表示颜色,任何颜色都与这三个分量有关,而且这三个分量是高度相关的,所以连续变换颜色时并不直观,想对图像的颜色进行调整需要更改这三个分量才行。
自然环境下获取的图像容易受自然光照、遮挡和阴影等情况的影响,即对亮度比较敏感。而 RGB 颜色空间的三个分量都与亮度密切相关,即只要亮度改变,三个分量都会随之相应地改变,而没有一种更直观的方式来表达。
但是人眼对于这三种颜色分量的敏感程度是不一样的,在单色中,人眼对红色最不敏感,蓝色最敏感,所以 RGB 颜色空间是一种均匀性较差的颜色空间。如果颜色的相似性直接用欧氏距离来度量,其结果与人眼视觉会有较大的偏差。对于某一种颜色,我们很难推测出较为精确的三个分量数值来表示。所以,RGB 颜色空间适合于显示系统,却并不适合于图像处理。
1.3 HSV 颜色空间
基于上述理由,在图像处理中使用较多的是 HSV 颜色空间,它比 RGB 更接近人们对彩色的感知经验。非常直观地表达颜色的色调、鲜艳程度和明暗程度,方便进行颜色的对比。在 HSV 颜色空间下,比 BGR 更容易跟踪某种颜色的物体,常用于分割指定颜色的物体。
HSV 表达彩色图像的方式由三个部分组成:
- Hue(色调、色相)
- Saturation(饱和度、色彩纯净度)
- Value(明度)
用下面这个圆柱体来表示 HSV 颜色空间,圆柱体的横截面可以看做是一个极坐标系 ,H 用极坐标的极角表示,S 用极坐标的极轴长度表示,V 用圆柱中轴的高度表示。
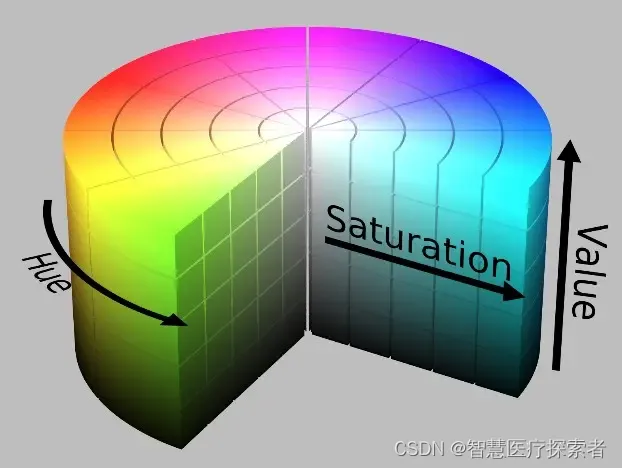
Hue 用角度度量,取值范围为0~360°,表示色彩信息,即所处的光谱颜色的位置。表示如下:
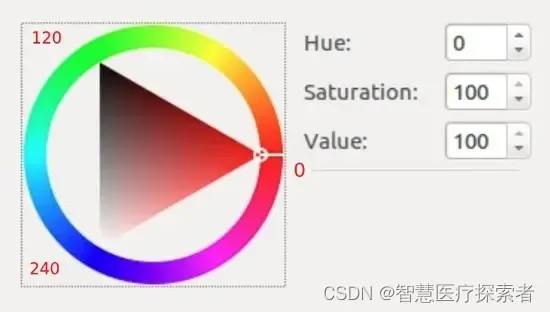
颜色圆环上所有的颜色都是光谱上的颜色,从红色开始按逆时针方向旋转,Hue=0 表示红色,Hue=120 表示绿色,Hue=240 表示蓝色等等。在 GRB中 颜色由三个值共同决定,比如黄色为即 (255,255,0);在HSV中,黄色只由一个值决定,Hue=60即可。
HSV 圆柱体的半边横截面(Hue=60):
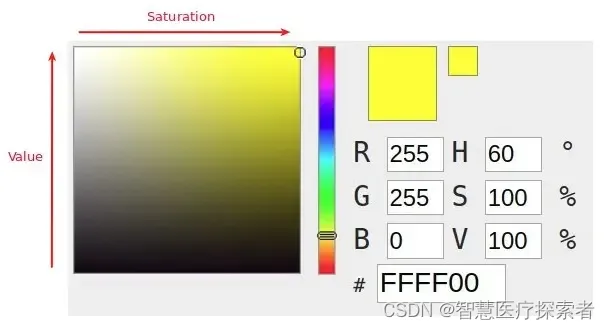
其中水平方向表示饱和度,饱和度表示颜色接近光谱色的程度。饱和度越高,说明颜色越深,越接近光谱色饱和度越低,说明颜色越浅,越接近白色。饱和度为0表示纯白色。取值范围为0~100%,值越大,颜色越饱和。
竖直方向表示明度,决定颜色空间中颜色的明暗程度,明度越高,表示颜色越明亮,范围是 0-100%。明度为0表示纯黑色(此时颜色最暗)。
可以通俗理解为:
在Hue一定的情况下,饱和度减小,就是往光谱色中添加白色,光谱色所占的比例也在减小,饱和度减为0,表示光谱色所占的比例为零,导致整个颜色呈现白色。
明度减小,就是往光谱色中添加黑色,光谱色所占的比例也在减小,明度减为0,表示光谱色所占的比例为零,导致整个颜色呈现黑色。
HSV 对用户来说是一种比较直观的颜色模型。我们可以很轻松地得到单一颜色,即指定颜色角H,并让V=S=1,然后通过向其中加入黑色和白色来得到我们需要的颜色。增加黑色可以减小V而S不变,同样增加白色可以减小S而V不变。例如,要得到深蓝色,V=0.4 S=1 H=240度。要得到浅蓝色,V=1 S=0.4 H=240度。
HSV 的拉伸对比度增强就是对 S 和 V 两个分量进行归一化(min-max normalize)即可,H 保持不变。
RGB颜色空间更加面向于工业,而HSV更加面向于用户,大多数做图像识别这一块的都会运用HSV颜色空间,因为HSV颜色空间表达起来更加直观!
1.4 HLS 颜色空间
HLS 和 HSV 比较类似,这里一起介绍。HLS 也有三个分量,hue(色相)、saturation(饱和度)、lightness(亮度)。
HLS 和 HSV 的区别就是最后一个分量不同,HLS 的是 light(亮度),HSV 的是 value(明度)。
HLS 中的 L 分量为亮度,亮度为100,表示白色,亮度为0,表示黑色;HSV 中的 V 分量为明度,明度为100,表示光谱色,明度为0,表示黑色。
下面是 HLS 颜色空间圆柱体:

提取白色物体时,使用 HLS 更方便,因为 HSV 中的Hue里没有白色,白色需要由S和V共同决定(S=0, V=100)。而在 HLS 中,白色仅由亮度L一个分量决定。所以检测白色时使用 HSL 颜色空间更准确。
注意:在 OpenCV 中 HLS 三个分量的范围为:
- H = [0,179]
- L = [0,255]
- S = [0,255]
2 使用opencv替换证件照背景颜色
2.1 导入图片并改变图片大小
原始图片:

代码实现:
img = cv2.imread('../data/card_girl01.jpeg')# 缩放
rows, cols, channels = img.shape
img = cv2.resize(img, None, fx=0.5, fy=0.5)
rows, cols, channels = img.shape2.2 获取背景区域
首先将读取的图像默认BGR格式转换为HSV格式,然后通过inRange函数获取背景的mask。
代码实现:
# 转换hsv
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
lower_blue = np.array([78, 43, 46])
upper_blue = np.array([110, 255, 255])
mask_img = cv2.inRange(hsv, lower_blue, upper_blue)new_image = show_multi_imgs(4, [img, cv2.cvtColor(mask_img, cv2.COLOR_GRAY2BGR)], (1, 2))
cv2.namedWindow('img&mask_img', 0)
cv2.imshow('img&mask_img', new_image)
cv2.waitKey(0)运行代码显示:
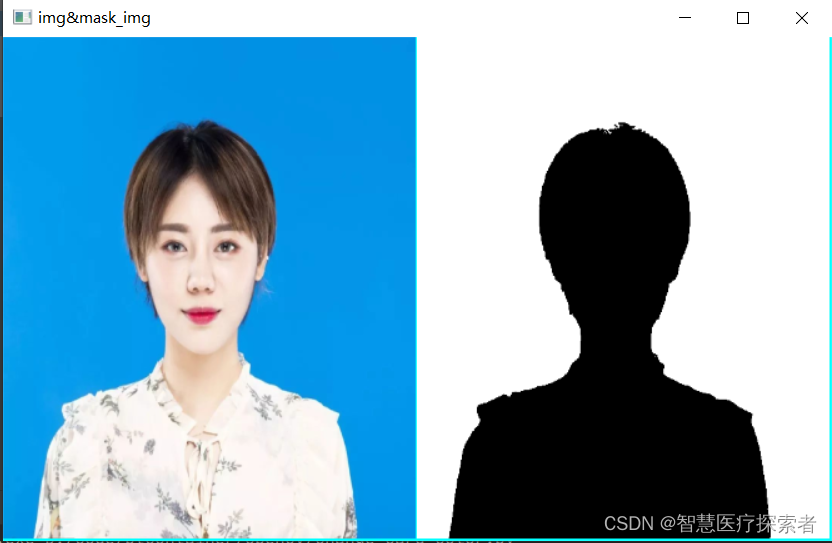
如图所示蓝色的背景在图中用白色表示,白色区域就是要替换的部分,但是黑色区域内有白点干扰,所以进一步优化。
2.3 腐蚀和膨胀
代码实现:
# 腐蚀膨胀
erode_img = cv2.erode(mask_img, None, iterations=1)new_image = show_multi_imgs(4, [img, cv2.cvtColor(erode_img, cv2.COLOR_GRAY2BGR)], (1, 2))
cv2.namedWindow('img&erode_img', 0)
cv2.imshow('img&erode_img', new_image)
cv2.waitKey(0)dilate_img = cv2.dilate(erode_img, None, iterations=1)
new_image = show_multi_imgs(4, [img, cv2.cvtColor(dilate_img, cv2.COLOR_GRAY2BGR)], (1, 2))
cv2.namedWindow('img&dilate_img', 0)
cv2.imshow('img&dilate_img', new_image)
cv2.waitKey(0)运行代码显示:
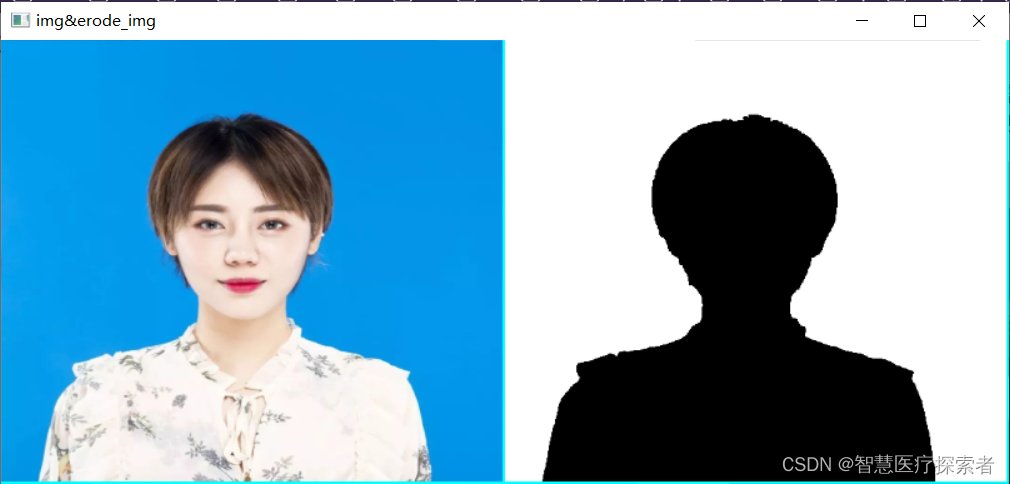
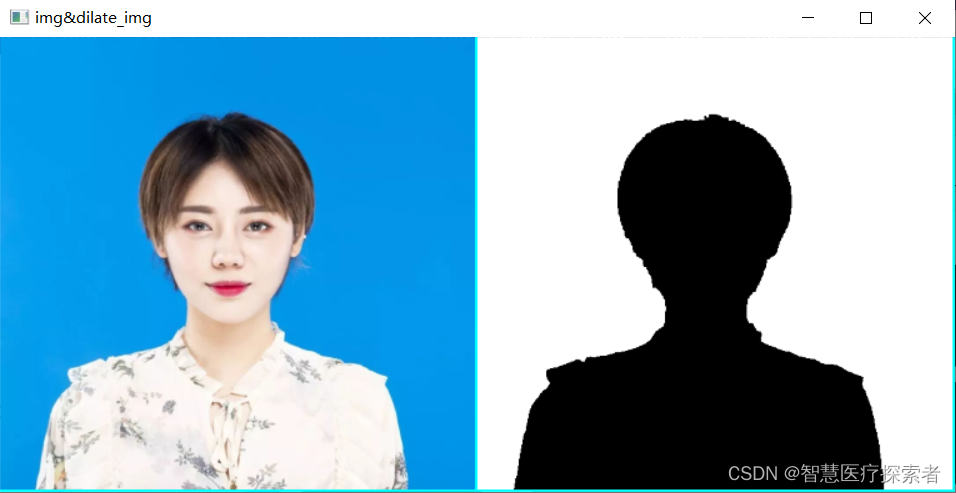
处理后图像单独白色点消失。
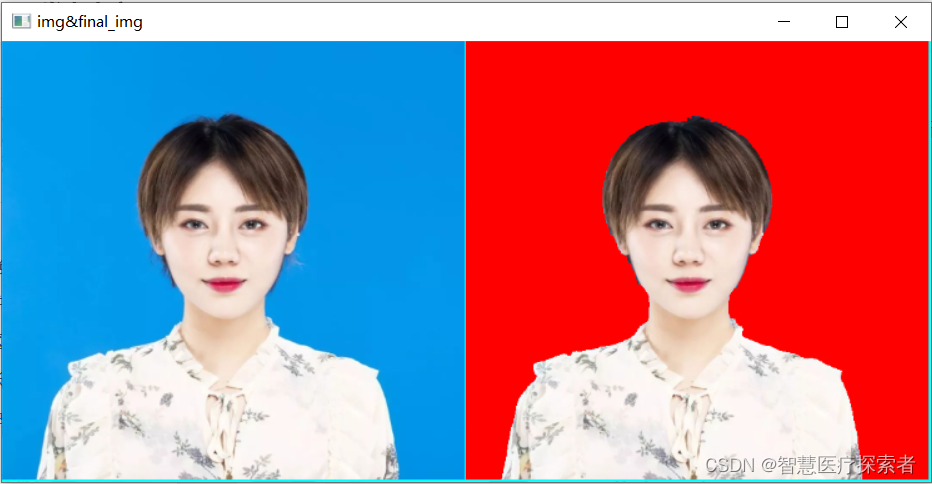
2.4 替换背景色
遍历全部像素点,如果该颜色为dilate里面为白色(255)则说明该点所在背景区域,于是在原图img中进行颜色替换。
示例代码:
# 遍历替换
final_img = img.copy()
for i in range(rows):for j in range(cols):if dilate_img[i, j] == 255:# 此处替换颜色,为BGR通道final_img[i, j] = (0, 0, 255)new_image = show_multi_imgs(4, [img, final_img], (1, 2))
cv2.namedWindow('img&final_img', 0)
cv2.imshow('img&final_img', new_image)
cv2.waitKey(0)运行代码显示:
2.5 完整代码
import cv2
import numpy as np# 一个窗口显示多张图片
def show_multi_imgs(scale, imglist, order=None, border=10, border_color=(255, 255, 0)):""":param scale: float 原图缩放的尺度:param imglist: list 待显示的图像序列:param order: list or tuple 显示顺序 行×列:param border: int 图像间隔距离:param border_color: tuple 间隔区域颜色:return: 返回拼接好的numpy数组"""if order is None:order = [1, len(imglist)]allimgs = imglist.copy()ws, hs = [], []for i, img in enumerate(allimgs):if np.ndim(img) == 2:allimgs[i] = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)allimgs[i] = cv2.resize(img, dsize=(0, 0), fx=scale, fy=scale)ws.append(allimgs[i].shape[1])hs.append(allimgs[i].shape[0])w = max(ws)h = max(hs)# 将待显示图片拼接起来sub = int(order[0] * order[1] - len(imglist))# 判断输入的显示格式与待显示图像数量的大小关系if sub > 0:for s in range(sub):allimgs.append(np.zeros_like(allimgs[0]))elif sub < 0:allimgs = allimgs[:sub]imgblank = np.zeros(((h+border) * order[0], (w+border) * order[1], 3)) + border_colorimgblank = imgblank.astype(np.uint8)for i in range(order[0]):for j in range(order[1]):imgblank[(i * h + i*border):((i + 1) * h+i*border), (j * w + j*border):((j + 1) * w + j*border), :] = allimgs[i * order[1] + j]return imgblankimg = cv2.imread('../data/card_girl01.jpeg')# 缩放
rows, cols, channels = img.shape
img = cv2.resize(img, None, fx=0.5, fy=0.5)
rows, cols, channels = img.shape# 转换hsv
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
lower_blue = np.array([78, 43, 46])
upper_blue = np.array([110, 255, 255])
mask_img = cv2.inRange(hsv, lower_blue, upper_blue)new_image = show_multi_imgs(4, [img, cv2.cvtColor(mask_img, cv2.COLOR_GRAY2BGR)], (1, 2))
cv2.namedWindow('img&mask_img', 0)
cv2.imshow('img&mask_img', new_image)
cv2.waitKey(0)# 腐蚀膨胀
erode_img = cv2.erode(mask_img, None, iterations=1)new_image = show_multi_imgs(4, [img, cv2.cvtColor(erode_img, cv2.COLOR_GRAY2BGR)], (1, 2))
cv2.namedWindow('img&erode_img', 0)
cv2.imshow('img&erode_img', new_image)
cv2.waitKey(0)dilate_img = cv2.dilate(erode_img, None, iterations=1)
new_image = show_multi_imgs(4, [img, cv2.cvtColor(dilate_img, cv2.COLOR_GRAY2BGR)], (1, 2))
cv2.namedWindow('img&dilate_img', 0)
cv2.imshow('img&dilate_img', new_image)
cv2.waitKey(0)# 遍历替换
final_img = img.copy()
for i in range(rows):for j in range(cols):if dilate_img[i, j] == 255:# 此处替换颜色,为BGR通道final_img[i, j] = (0, 0, 255)new_image = show_multi_imgs(4, [img, final_img], (1, 2))
cv2.namedWindow('img&final_img', 0)
cv2.imshow('img&final_img', new_image)
cv2.waitKey(0)









)







】数据类型和变量你真的理解了吗?来看看这篇)
