STM32 HAL库定时器输入捕获SlaveMode脉宽测量
SlaveMode模式简介
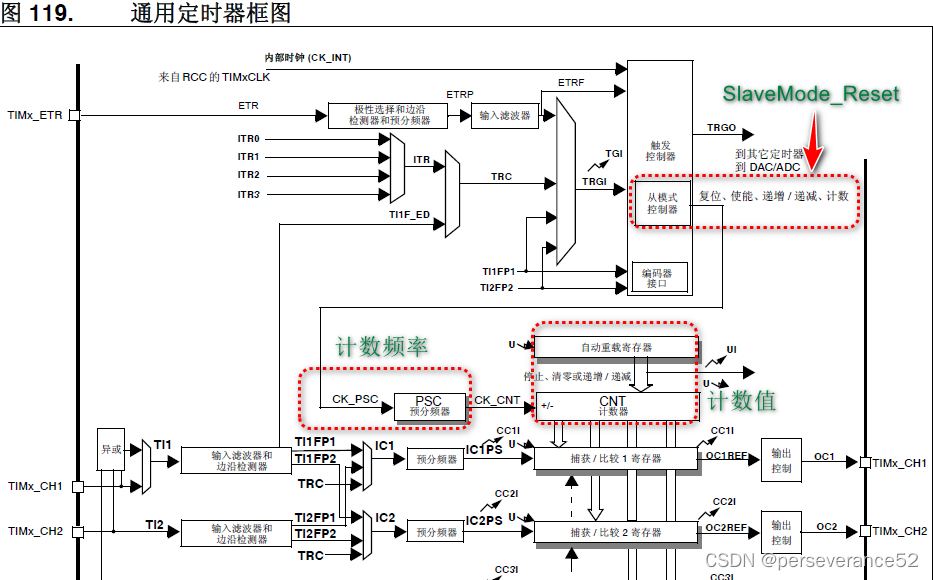
✨SlaveMode复位模式:在发生一个触发输入事件时,计数器和它的预分频器能够重新被初始化;同时,如果TIMx_CR1寄存器的URS位为低,还会产生一个更新事件UEV;然后所有的预装载寄存器(TIMx_ARR, TIMx_CCRx)都会被更新。
- 🔖当所测频率低于最小定时器捕获频率时,需要使能自动重装载和定时器溢出中断。
SlaveMode模式下当输入捕获引脚接收到脉冲的上降沿信号时,产生复位并从零开始重新计数。
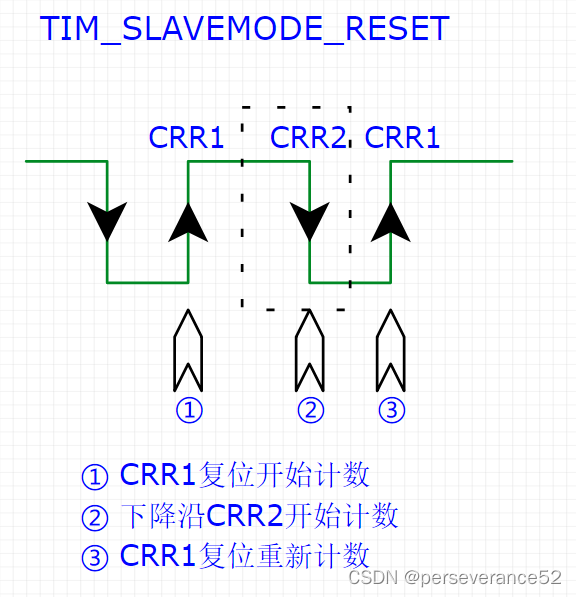
- 🎋一个周期内的总计数:输入捕获上(下)升沿信号开始,到下一个上(下)升沿结束总计数个数: C N T = N ∗ ( A R R + 1 ) + C R R 1 CNT=N*(ARR+1)+CRR1 CNT=N∗(ARR+1)+CRR1
-
- N:定时器溢出次数
-
- ARR:TIMx预装载值
-
- TIMx->CRR1寄存器计数值
- 🌴定时器计数频率: f = F o s c / ( p s c + 1 ) f =Fosc/(psc+1) f=Fosc/(psc+1)
-
- Fosc:定时器的频率(主时钟频率)
-
- psc:分频系数
- 📐计一个数时间: T = 1 ÷ f T = 1 \div f T=1÷f = 1 f \frac{1}f f1
- 📏CNT总计数时间: C N T × T CNT \times T CNT×T
- 📏脉宽宽度等于上升沿开始到下一个下降沿之间的计数值: C C R 2 ∗ 1 f CCR2*\frac{1}f CCR2∗f1
📑PWM主要参数
- 🌿频率:是指1秒钟内信号从高电平到低电平再回到高电平的次数(一个周期);
- 🌿占空比:一个脉冲周期内,高电平的时间与整个周期时间的比例。
🛠输入捕获SlaveMode脉宽测量
- 🌿输入捕获到的PWM信号频率: 1 / C N T ∗ T = 1 / C N T ∗ ( 1 / f ) = f / C N T 1/CNT*T = 1/CNT*(1/f) = f/CNT 1/CNT∗T=1/CNT∗(1/f)=f/CNT
- 🌿PWM占空比: C R R 2 ÷ C N T CRR2 \div CNT CRR2÷CNT
📐最小捕获频率计算
- 🎋定时器频率: f / p s c f/psc f/psc
PSC定时器TIMx->PSC= f / ( p s c − 1 ) f/(psc-1) f/(psc−1)
- 🔧在没有开启溢出中断的情况下,最小捕获频率 = 2000000 ÷ 65535 ≈ 15.25 H z 2000 000 \div 65535 \approx 15.25Hz 2000000÷65535≈15.25Hz
- 👉🏻如果开启了溢出中断,那么捕获频率就不受限制。
- 🔧开启溢出中断的情况下,捕获频率 = 2000000 ÷ N ∗ ( A R R + 1 ) + C R R 1 2000 000 \div N*(ARR+1)+CRR1 2000000÷N∗(ARR+1)+CRR1 (其中N代表溢出次数,ARR代表装载值)
- 🔖如果被测量的频率低于1Hz,那么测量就没有多大意义了。
📝输入捕获SlaveMode脉宽测量例程
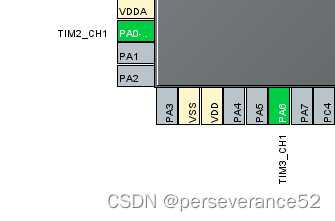
使用STM32F1利用TIM3通道1产生PWM输出信号,使用TIM2定时器作为信号输入捕获,并开启
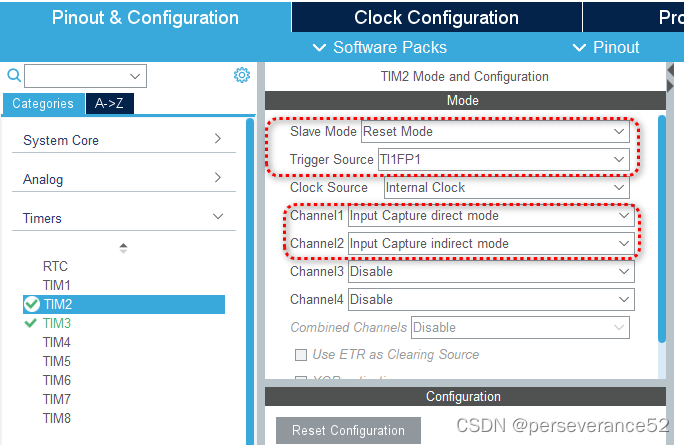
SlaveMode模式设置为ReSet Mode,同时开启两路极性互补输入捕获。
- 🌿接线说明:PA6 PWM输出引脚和PA0输入捕获引脚连接到一起即可进行测量。
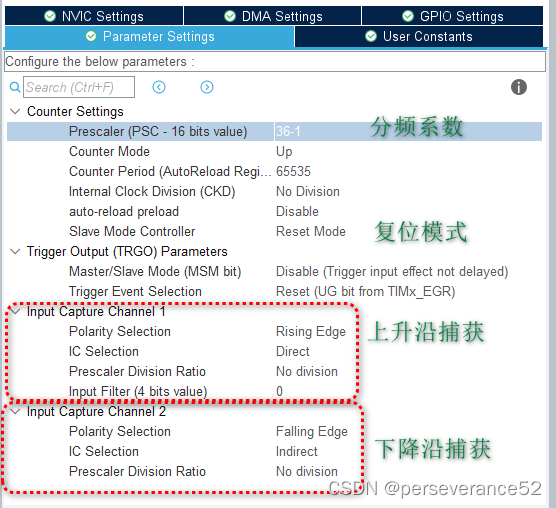
- 🔨TIM2输入捕获配置
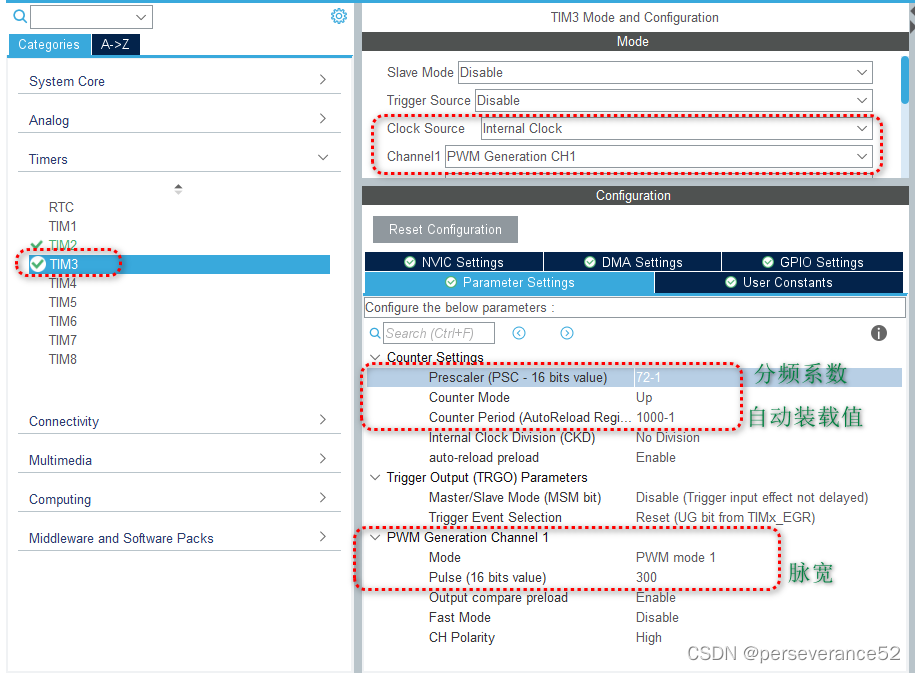
- 🌿TIM3配置输出PWM占空比和频率可以行调整测试。
- 📑main程序代码
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "string.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 */uint8_t USART_TX_Buff[32] = {0};uint16_t Duty, Duty_High, ARR, PWM_f;/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM2_Init();MX_TIM3_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1); //开启PWM输出通道:PA6
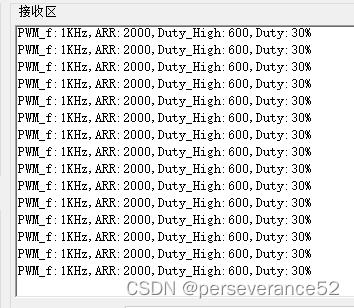
// TIM3->ARR = 1000-1;//自动重装载值TIM3->CCR1 = 300;//捕获/比较计数值,PWM占空比5000/1000=50% f=1MHz/1000=1KHzTIM2->PSC = 36 - 1; //预分频;f=2MHzHAL_TIM_IC_Start(&htim2, TIM_CHANNEL_1); //开启输入捕获上升沿:PA0HAL_TIM_IC_Start(&htim2, TIM_CHANNEL_2); //开启输入捕获下降沿:PA0/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while(1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */HAL_Delay(1000);ARR = TIM2->CCR1 + 1; //捕获上升沿开始计数,计数值Duty_High = TIM2->CCR2 + 1; //捕获下降沿,计数值//f = f/psc=1000 000//计一个数的时间T:1/f//PWM_f = ARR/fPWM_f = 2000/ARR;//KHz, 1/ARR*(T)= 1/ARR*(1/f)= f/ARRDuty = Duty_High * 100 / ARR;sprintf((char*)USART_TX_Buff, "PWM_f:%dKHz,ARR:%d,Duty_High:%d,Duty:%d%%", PWM_f, ARR, Duty_High, Duty); //打印输入捕获总计数值,高电平计数值printf("%s \n", USART_TX_Buff);memset((char*)USART_TX_Buff, '\0', strlen((char*)USART_TX_Buff)); //清空数组}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if(HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK| RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if(HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while(1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t* file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */- 📋串口打印
📚工程源码
链接:https://pan.baidu.com/s/1OJ6JuZt-76A-AjvvB2H3cA
提取码:p4hf