前言:一点思考
外骨骼机器人和人形机器人都曾随着一些爆品的出现火热过一段时间,但总感觉当前技术条件还不成熟,真正能落地的应用场景不多。马斯克在擎天柱发布会上被问到人形机器人的落地与前景问题时并没有给出明确答案,只是用“The future is interesting, it won’t be boring”搪塞过去。
机器人是人工智能和机器的结合,发展机器人有两条路径,以家用电器机器人化为代表的人格化发展路径和以通用人形机器人为代表的物化发展路径。人类有种本能,既热衷于物化同类,也热衷于人格化异类。这两条路径的平衡点在哪里?通用人形机器人是否是打通万物互联末端路径的理想选择?
以智慧家居/家电和家用人形机器人为例,如果智慧家居场景足够成熟,还需要人形机器人来代替人去享用那套场景吗?如果人形机器人足够强大,那还有发展智慧家居的必要性吗?《家用电器机器人化设计导则》中明确了家用电器机器人化的5个发展阶段,R0阶段不具有智能化功能,R4阶段则已经到达自主机器人化阶段,能与人和谐共生共融。R4阶段的家用电器和智慧家居场景下,还需要人形机器人这一形态的家电吗?或者说那时候的家电都是专用机器人,通过多机器人协同共同打造以人为本的智慧家居场景。
似乎外骨骼机器人才是更理想的一种拓展人类能力的工具。这个发展方向是必然的,只是当下还看不到成熟的落地场景,原因也有很多,下文会详细分析。
一、外骨骼机器人
1. 典型外骨骼机器人
(1)美国EKSO

上肢外骨骼机器人,类似于有源背背佳,能消除与工作有关的脖子、肩膀、背部的伤害。
(2)以色列ReWalk

下肢康复机器人,有强大的中央处理系统和高精度传感器,系统能通过检测重心位置的细微变化控制运动,模仿使用者习惯的自然步伐,为用户提供适合的行走速度。
2. 应用领域
军用。美欧日中俄都在开发研制,基本还没有成熟产品。这方面需求很大,只是技术性能和可靠性还达不到要求。军事领域的外骨骼未来只会不断突破,成为类似头盔一样的必备装备,不会出现衰落的可能。
医用。使用设备风险较高,只有固定坐卧式、被动康复这类简单可靠、安全可控、保养维护简单的设备,医院才敢放心使用。医疗康复设备需要获得医疗器械注册证和医疗器械生产许可证才能生产与销售,门槛较高,申报认证和审批过程复杂、时间漫长,且一旦审批认证,无法常规地修改迭代产品结构、性能、部件、材料,极大限制了科技公司研发医疗康复型外骨骼机器人产品的积极性。医疗外骨骼也难以列入医疗保险服务目录。虽然医疗外骨骼技术上可行,但研发成本高、周期长、获取认证困难大、迭代升级慢,目前仍处于艰难探索阶段。从国外上市多年的医疗康复外骨骼公司的发展与股价可得到验证。
工业。搬运、抬举。该领域需求已得到确认,用途广泛。目前工业外骨骼大部分还是无源,属于机械或机电产品,不能算机器人,门槛低、用途窄、难以产业化。有源外骨骼机器人才会是未来发展的方向。
民用。辅助行走、运动助力。这应该是未来最大市场,日本HONDA、韩国三星、中国深圳肯綮qing科技等。针对有较长时间行走与站立的人群、老年人、行动不便人士等。
娱乐。力反馈型可穿戴体感设备配合VR、AR可用作娱乐。
3. 缺陷
外骨骼机器人目前在康复医学行业应用较多,且侧重神经康复。但是事与愿违,虽然有庞大的受用群体,但产品很难与医学结合在一起,有几个问题难以解决:
第一,产品的平衡问题,即如何保证神经损伤的患者以自然生理位行走。神经损伤患者使用外骨骼机器人时,需要身体前倾,一旦直立定然会往后摔倒,这种瘫痪病人的摔倒很容易致死。为了避免摔倒,只能采用身体前倾姿势。这又会带来双臂过渡承重的问题。
第二,身体和机器的连接采用捆绑式,瘫痪人士的血液循环非常差,捆绑又会进一步产生束缚和血栓问题。
第三,穿脱不便,通常需要四五个人辅助。
第四,路面不平的问题。当外骨骼遇到门槛、斜坡、台阶,很容易摔倒。摔倒后也很难爬起来。
第五,康复意义没有实验数据支持,对褥疮、骨质疏松、脊柱侧弯、肥胖、心肺功能、泌尿系统、关节挛缩变形等都没有确凿的实验数据支撑。
第六,价格高,不太实用,电池续航不足,陀螺仪、控制器精贵,维修非常昂贵。
第七,外骨骼大部分传动零件处于低速运动状态,润滑油很难在零件表面形成油膜,对零部件磨损非常大。
第八,军用意义目前不大,和导弹的面杀伤相比,外骨骼的性价比太低。长途行军可以配备机动车辆,特殊地点可以通过直升机、无人机、专用机器人,都比外骨骼性价比高。
二、人形机器人
1、知名人形机器人
(1)ASIMO
2000年时,本田就做出ASIMO,它在当时的知名度与如今的波士顿动力机器人Atlas不相上下,代表了日本人形机器人最高水平,是机器人历史上重要的里程碑之一。

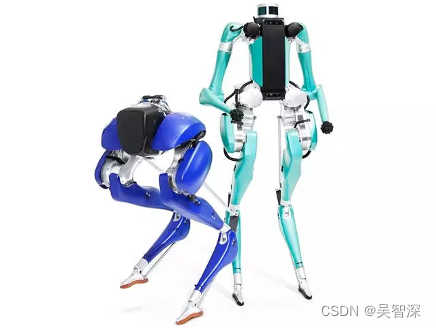
(2) Cassie和Digit
Agility Robotics研发的腿足式机器人Cassie和人形机器人Digit。它们遵循一个最简单的数学模型:由一个质点连接到一对理想弹簧(腿)。所以该模型也称作“弹簧—质点模型”。
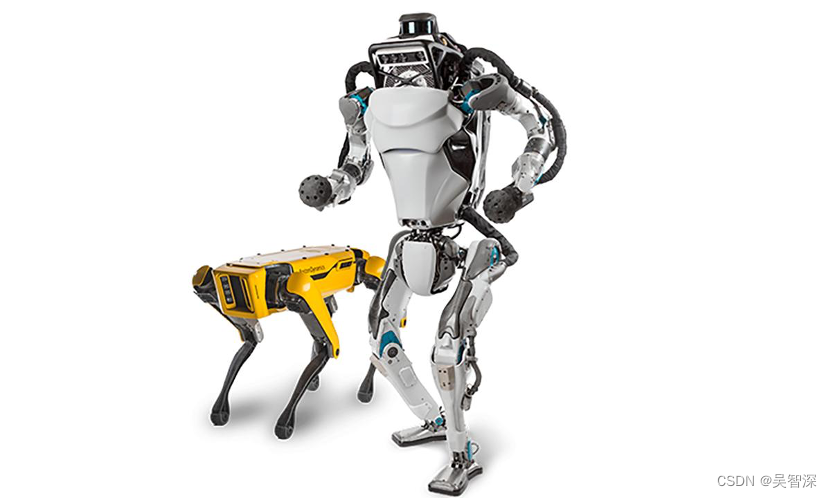
(3)波士顿动力Atlas和BigDog
(4)特斯拉Optimus
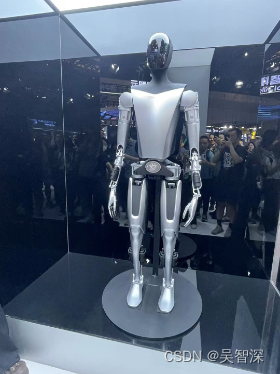
Optimus主要由机械部分和电子部分组成,机械部分包含28个执行器和双手,电子部分包含大脑和躯干(冷却系统和电池包)。
执行器采用减速机+电机的传动方式,减速机扭矩从20Nm到180Nm,电机力矩从500N到8000N,均采购自减速机和电机头部企业。
双手搭载大量传感器,可实现细微操作。
大脑搭载与特斯拉电动车相同的FSD全自动驾驶系统、感知计算单元和自主研发的算力极强的Dojo D1超级芯片。
躯干高度集成传感器、电池组和冷却系统。
2、关键技术
(1)双足机器人步态算法
倒立摆(LIP)+零力矩点(ZMP)模型。该模型将机器人简化为一个倒立摆模型,整体控制的目的是使实际ZMP与参考ZMP位置误差尽可能小。需要根据期望的ZMP位置(落脚点)计算出质心的运动情况和实际的ZMP位置,并反馈跟踪ZMP位置。使用该控制方法要求机器人行走过程中质心高度恒定,因此智能屈膝步行。该控制算法典型代表是本田的Asimo机器人、优必选的Walker X。
该算法后来发展出一些变形,如Divergent Component of Motion(DCM)算法、Spatially Quantized Dynamics(SQD)算法,能实现更接近人类的直膝行走步态。
弹簧负载倒立摆模型(SLIP)。该模型的控制算法可浓缩为“三部独立控制法”,将弹跳机器人复杂的控制解耦为三部分:高度控制、前进速度控制、身体姿态控制。其中落脚点控制是“三部独立控制法”中的关键点。该控制算法的典型代表是鸵鸟腿Cassie,以及带上半身的Digit。但现在他们已经主攻强化学习在双足机器人的应用,并取得很大成果。
此外还有基于非线性控制理论的Hybrid Zero Dynamics(HZD)方法、四足开源控制算法Whole Body Control(WBC)、最初用于自动驾驶领域的Model Predictive Control(MPC)方法。随着强化学习的发展,其也被用于控制机器人步态,相比于传统方法对机器人模型进行简化处理,强化学习可以通过蒙特卡洛抽样进行不断试错,最终获得最优控制策略。
(2)传感器、液压元件、机电系统
待补充
3. 双足机器人直膝行走的优势
现有双足机器人大多是屈膝步行,原因有如下几个:
- 屈膝可降低机器人重心,提高稳定性;
- 伸直膝关节的位置是一个奇异点,在该位置计算出的关节速度非常大,难以控制;
- 脚踝关节的设计、脚底板的设计以及压力传感器的安装方式等导致机器人的步相缺乏脚跟落地(heel-contact)和脚趾离地(toe-off)这两个相位;
- 采用线性倒立摆相关控制策略时,要求质心高度是恒定的,因此智能屈膝步行。
双足机器人直膝行走比屈膝行走具有一些优势:
- 更仿人;
- 可充分利用机械结构来节省能量;
- 屈膝时步长较短,没有充分利用腿的长度,直膝行走可提升步行效率;
- 直膝步行、Heel-Contact和Toe-Off可以有效增加步长和提升步行的能量利用效率。
三、AGV、LGV、KIVA、AMR
AGV(Automated Guided Vehicle),自动导引运输车。上个世纪移动机器人技术不发达,当时的AGV都是在导引技术里迭代升级。
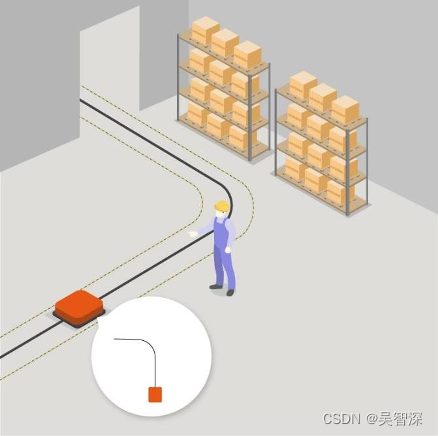
随着移动机器人技术的发展,实体导引线逐渐被激光导航技术取代,通过高位反光板和定位激光雷达解决AGV精准定位问题,并在软件中通过虚拟导引线代替地面实物导引线,这类技术又被成为软导引AGV或LGV(Laser Guided Vehicle)。目前大部分无人叉车都属于LGV。

LGV虽然不用在地面铺设实体导引线,但其沿着虚拟导引线行使,不具备灵活避障和贴合现实环境的路径规划能力,停等是其主要避障方法。
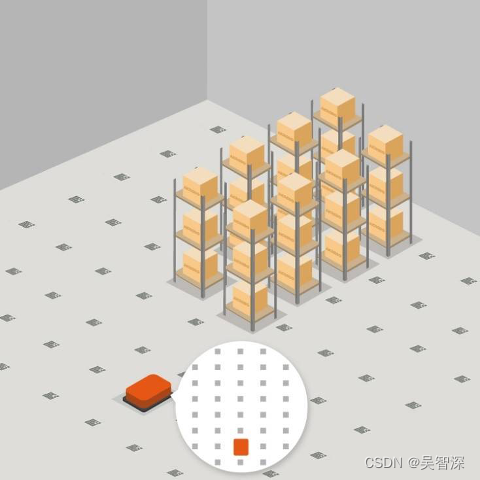
地标AGV。亚马逊KIVA机器人就是典型的地标AGV,KIVA因大规模应用于仓库拣选场景而被广为人知。其核心技术是在地面铺设地标(如二维码等),通过二维码定位在地标矩阵间移动。基于离散地标进行定位导航,使得地标AGV在路线选择上更灵活,并具备更强的多机协同能力。但这类技术仍需要铺设固定路径信标,设定特定运行区域,且该类机器人通常只具备简单感知能力,无法应用在人机协同作业场景。
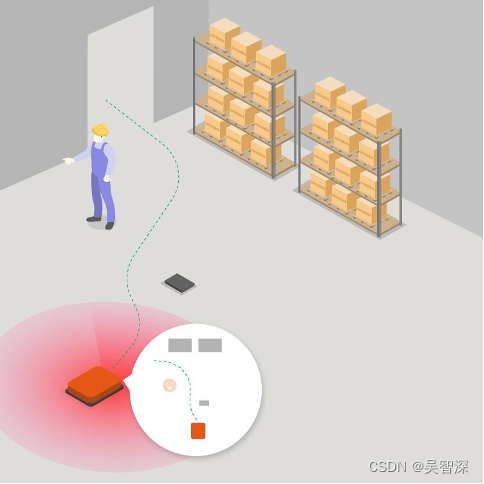
AMR(Autonomous Mobile Robot)是指自主性强的移动机器人,适用于人机协同作业场景,一般需要具备丰富的环境感知能力、基于现场的动态路径规划能力、全局定位能力等。与传统AGV不同,AMR需要融合多种传感器(激光雷达、深度摄像头模组、超声波等),具备深度感知能力,能通过SLAM(Simultaneous Localization and Mapping)即时定位与地图构建技术,感知动态复杂的环境,主动基于实景规划路径。

 等级考试试卷(七级))





)
TCP 实战抓包分析(三)TCP 第一次握手 SYN 丢包)

)




)
)

)
