1、问题背景
使用竞品机做图像效果对比时,我们通常都会要求拍摄的照片要视场范围一致,这样才具有可比性。之前我会考虑用同样焦距、同样分辨率的设备去拍照对比就可以了,觉得相机的视场范围只由镜头焦距来决定。
但如果对于不同尺寸的传感器,比如我用手机和全画幅的单反相机去拍照,怎么能保证拍照的视场范围保持一致呢?手机传感器的尺寸比全画幅单反相机的尺寸小太多了,只保持分辨率相同,镜头焦距一致,拍出来视场范围不可能一样。但如何做到拍出视场范围一样的照片呢?这是本文要分析的问题。
2、问题分析
a、什么决定拍照时的视场范围?
b、当使用不同尺寸的传感器时,该怎么保证拍出同样视场范围的照片?
a、什么决定拍照时的视场范围?
视场范围,相机能拍摄到的最大物高范围,就叫视场范围。如下光路图所示,是照相机的成像原理,物体在2倍焦距外时,成倒立缩小的实像。根据光路图得到公式:y / -y = -x / -f ,y = x * -y/f (y是物高,x是物距,-y是像高,f是焦距)。
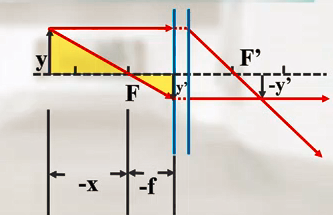
如下图所示,物高实际分轴上和轴下,所以上式要乘以2,得到:Y = x * D/f(基于实际应用,物体在无限远处,焦距的长度忽略不计,光心到传感器的距离就是焦距),Y就是最大像高,也就是视场范围。
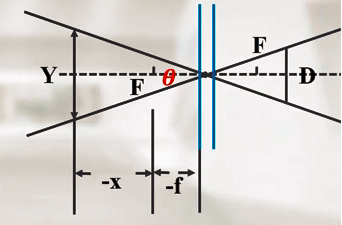
由公式 Y = x * D/f 可知,当物距和传感器尺寸一定时,视场范围和焦距成反比。
所以当用一台相机拍照时,即传感器尺寸不变,当拍摄同一物体时,即物距不变。这时焦距决定了拍照时的视场范围,焦距越大,视场范围越小,焦距越小,视场范围越大。
b、当使用不同尺寸的传感器时,该怎么保证拍出同样视场范围的照片?
当我们对比两台设备的图像效果时,通常是拍摄同一场景,即物距相同。但这时存在两个变量,传感器的尺寸和镜头焦距。如果用手机和全画幅的相机来拍照,传感器的尺寸肯定是差别很大的,那如何做到拍摄同样视场范围的照片呢?
1)这里涉及到一个等效焦距的概念,什么叫等效焦距?
就是把不同尺寸传感器上的焦距转化为135全画幅相机同样视角所对应的焦距,转化成全画幅后的焦距叫等效焦距。
补充:什么是135全面画幅相机?
胶片时代,我们使用最多的是编号为135型胶卷底片(感光区域范围36*24mm),摄影厂商就以此为规范设计镜头和机身,数码相机的感光元器件,面积的大小成本差异很大,和135胶卷面积相同的ccd或者cmos为全画幅。


2)等效焦距的计算方法
135全画幅视场范围:Y = x * D35/f35
非全画幅视场范围:Y = x * D0/f0
视场范围相同:x * D35/f35 = x * D0/f0
等效焦距:f35 = D35/D0 * f0 = C * f0
焦距转换系数:C = D35/D0
3)等效焦距的实际应用

如上图所示,是佳能5D4相机200mm焦距和佳能7D相机200mm焦距拍摄的效果图,可以看出在同样的物距、焦距下佳能5D4相机拍摄的视场范围更大一些。佳能5D4相机传感器尺寸36*24mm,佳能7D相机传感器尺寸 22.3*14.9mm。
焦距转换系数:C = D5d4/D7d = √(36^2 + 24^2) / √(22.3^2 + 14.9^2) = 1.6
等效焦距:f5d4 = 200*1.6=320mm,也就是佳能7D+200mm拍摄效果,就相当于全画幅相机320mm焦距时的拍摄效果。
而佳能7D要拍出佳能5D4+200mm的效果,需采用 200/1.6=125mm 焦距的镜头才可以。
自动装配与注解开发)
:管理用户权限)

)






-- Aurora 8b10b 信号传输实战--小试牛刀)

)






)