目录
- 状态空间建模与极点配置 —— 理论、案例与交互式 GUI 实现
- 一、引言
- 二、状态空间建模的基本理论
- 2.1 状态空间模型的优势
- 2.2 状态空间模型的物理意义
- 三、极点配置的理论与方法
- 3.1 闭环系统的状态反馈
- 3.2 极点配置条件与方法
- 3.3 设计流程
- 四、状态空间建模与极点配置的优缺点分析
- 4.1 优点
- 4.2 缺点
- 五、典型案例分析
- 5.1 案例一:二阶机械系统的状态反馈设计
- 5.1.1 案例描述
- 5.1.2 分析过程
- 5.2 案例二:多输入系统中的极点配置
- 5.2.1 案例描述
- 5.2.2 分析过程
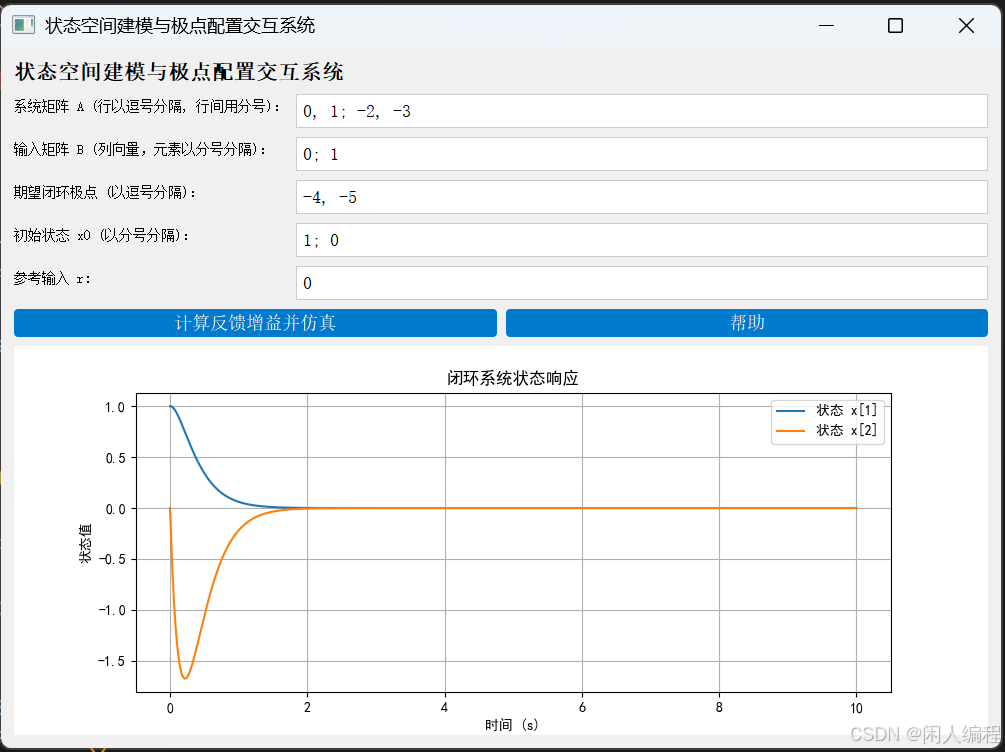
- 六、基于 PyQt6 的交互式 GUI 实现
- 七、Python 代码实现
- 八、结语
状态空间建模与极点配置 —— 理论、案例与交互式 GUI 实现
一、引言
在现代控制理论中,状态空间建模已成为描述和分析动态系统的主要工具。与传统的传递函数方法相比,状态空间模型能够全面描述系统的动态特性,不仅适用于多输入多输出(MIMO)系统,而且便于处理时变和非线性问题。利用状态空间模型,我们可以将系统描述为一组一阶微分方程,从而揭示系统内在的状态信息及其随时间的演变规律。
另一方面,极点配置是一种基于状态反馈设计的控制方法,其核心思想是通过适当选择反馈增益 K K K,使得闭环系统矩阵 A − B K A-BK A−BK 的特征值(即极点)满足预定的动态性能指标。极点配置不仅可以实现快速响应、低超调和良好的稳态误差等性能要求,还为控制器设计提供了一种系统化的思路。
本文将从状态空间建模与极点配置的基本原理入手,详细介绍数学建模、极点配置的设计方法以及实现步骤;随后,结合多个实际案例,展示该方法在实际工程中的应用;最后,提供一份基于 Python 与 PyQt6 的交互式 GUI 程序代码示例,帮助工程师和研究者在仿真平台上直观体验状态空间建模与极点配置的实际效果。
二、状态空间建模的基本理论
状态空间模型是一种用状态变量描述动态系统的方法,其基本形式为
x ˙ ( t ) = A x ( t ) + B u ( t ) , y ( t ) = C x ( t ) + D u ( t ) , \begin{aligned} \dot{x}(t) &= A x(t) + B u(t), \\\\ y(t) &= C x(t) + D u(t), \end{aligned} x˙(t)y(t)=Ax(t)+Bu(t),=Cx(t)+Du(t),
其中:
- x ( t ) ∈ R n x(t) \in \mathbb{R}^n x(t)∈Rn 为状态向量,描述系统内部的能量、位置、速度等信息;
- u ( t ) ∈ R m u(t) \in \mathbb{R}^m u(t)∈Rm 为输入向量;
- y ( t ) ∈ R p y(t) \in \mathbb{R}^p y(t)∈Rp 为输出向量;
- A ∈ R n × n A \in \mathbb{R}^{n \times n} A∈Rn×n、 B ∈ R n × m B \in \mathbb{R}^{n \times m} B∈Rn×m、 C ∈ R p × n C \in \mathbb{R}^{p \times n} C∈Rp×n、 D ∈ R p × m D \in \mathbb{R}^{p \times m} D∈Rp×m 分别为系统的状态矩阵、输入矩阵、输出矩阵和直接传递矩阵。
2.1 状态空间模型的优势
状态空间模型具有以下显著优势:
- 适用范围广:适用于多输入多输出系统,能够描述复杂的高维系统。
- 时域描述直观:利用状态变量可以直接描述系统动态行为,便于分析瞬态响应和稳定性问题。
- 扩展性好:易于扩展到时变和非线性系统,通过线性化方法仍可在局部区域应用。
- 现代控制设计基础:为极点配置、最优控制、鲁棒控制等现代控制方法提供理论基础。
2.2 状态空间模型的物理意义
在实际工程中,状态变量通常代表系统中的物理量,如机械系统中的位置、速度和加速度;电路系统中的电压、电流;化工过程中的浓度、温度等。利用状态空间模型,可以将系统内部各物理量之间的关系通过矩阵形式表达,从而为后续的控制器设计提供直观的数学描述。
例如,一个简单的二阶机械系统的状态空间模型可以写为
x ˙ 1 ( t ) = x 2 ( t ) , x ˙ 2 ( t ) = − k m x 1 ( t ) − b m x 2 ( t ) + 1 m u ( t ) , \begin{aligned} \dot{x}_1(t) &= x_2(t), \\\\ \dot{x}_2(t) &= -\frac{k}{m} x_1(t) - \frac{b}{m} x_2(t) + \frac{1}{m} u(t), \end{aligned} x˙1(t)x˙2(t)=x2(t),=−mkx1(t)−mbx2(t)+m1u(t),
其中 x 1 ( t ) x_1(t) x1(t)</





任务书)

解析一)









)

(详解))