接上回:学习记录:AUTOSAR R20-11的阅读记录(四)【CP(5.6-5.10)】
五、CP
11、General(4个)
| 5.11 | File Name | 说明 |
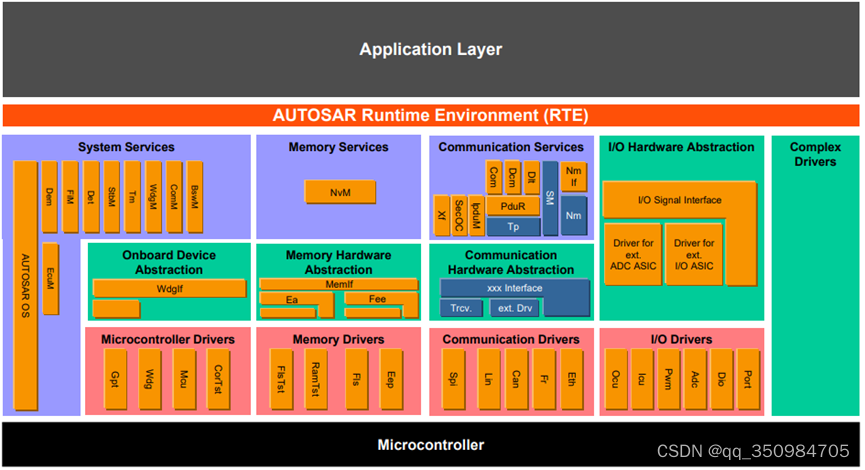
| 1 | AUTOSAR_EXP_ LayeredSoftwareArchitecture.pdf | 描述了AUTOSAR的分层软件架构,参考(图11-1) |
| 2 | AUTOSAR_RS_Features.pdf | 1. 需求索引,前缀: ”RS_Main_*” –> ”RS_BRF_*” 2. 本文档描述了AUTOSAR的所有功能,包括基本软件(BSW)和RTE: • System and Architecture • Operating System • Runtime Environment (RTE) • Services • Mode Management • Communication via Bus • Communication buses • Memory Stack • Microcontroller Abstraction and I/O • Security • Safety • Libraries • Diagnostic and Error Handling • Test and Debugging • Integration and Migration • Standardization and Documentation |
| 3 | AUTOSAR_SWS_ BulkNvDataManager.pdf | 1. 需求索引,前缀: ”RS_Diag_*” –> ”RS_BndM_*” 2. 本规范描述了AUTOSAR基本软件模块BulkNvDataManager的功能、API和配置。 BulkNvDataManager为NvM提供了直接从闪存读取数据的API 3.详细api,索引到SWS_BndM_* |
| 4 | AUTOSAR_EXP_VFB.pdf | 1.本规范描述了AUTOSAR虚拟功能总线(VFB)。 2.VFB提供: • 与系统中其他组件的通信 • 与系统中的传感器和致动器的通信(参见第6章) • 访问标准化服务,例如从非易失性ram读取或写入(参见第7章,AUTOSAR服务) • 响应模式变化,如本地ECU的电源状态变化(参见第8章,模式管理) • 与校准和测量系统交互(见第10章) |
(图11-1)
12、Methodology and Templates(19个)
| 5.12 | File Name | 说明 |
| 1 | AUTOSAR_TPS_ BSWModuleDescriptionTemplate.pdf | 1. 需求索引,前缀: ”RS_BSWMD_*” –> ”TPS_BSWMDT_*” 2. 这是基本软件模块描述(BSWMDT)模板的文档。BSWMDT——用于BSWMD的模板——是AUTOSAR中必须用于此描述的标准格式。模板在UML中表示为整个AUTOSAR元模型的一部分,并且是从该元模型生成的XML模式的一部分。本文档描述了属于此模板的所有元素 3.列出相关类表 |
| 2 | AUTOSAR_TPS_ DiagnosticExtractTemplate.pdf | 1. 需求索引,前缀: ”RS_DEXT_*” –> ”TPS_DEXT_*” 2. AUTOSAR ECU开发的分布式特性要求优化信息捕获。在DiagnosticExtract出现之前的配置方法中,基本软件模块DCM和DEM完全集中配置 3. DiagnosticExtract的基本用途是在诊断开发过程中涉及的不同方之间交换诊断数据,以允许配置DCM和DEM,并提供相应应用程序接口的描述,以实现诊断服务和故障处理 4.列出相关类表 |
| 3 | AUTOSAR_TR_ FrancaIntegration.pdf | 1.GENIVI体系结构与AUTOSAR体系结构相似,因为它区分了应用层、中间件和基础软件,从而促进了集成。对于应用层软件组件的描述,GENIVI使用Franca接口定义语言 2.Franca集成的目的是在应用层支持AUTOSAR和GENIVI系统的集成。该应用程序级集成必须与通信级集成相结合,以实现AUTOSAR和GENIVI系统之间的在线消息交换,可以通过以太网通信的串行化协议SOME/IP |
| 4 | AUTOSAR_TR_Methodology.pdf | 1. 需求索引,前缀: ”RS_METH_*” –> ”TR_METH_*” 2. AUTOSAR要求系统开发的某些步骤采用通用技术方法。这种方法称为AUTOSAR方法。本文件定义并描述了AUTOSAR方法。它涵盖了使用AUTOSAR开发系统的所有主要步骤:从定义虚拟功能总线到生成ECU可执行文件 3. AUTOSAR方法分为几个开发领域: •虚拟功能总线 •系统 •软件组件 •基本软件 •ECU |
| 5 | AUTOSAR_EXP_ ModelingShowCases.zip | 建模展示案例示例: 此zip文件包含技术报告的补充材料“建模展示案例”,例如ARXML文件、A2L文件 |
| 6 | AUTOSAR_TR_ ModelingShowCases.pdf | 本报告的目的是说明和执行选定展示案例的AUTOSAR建模和AUTOSAR方法。它包含 •应用AUTOSAR建模特定部分的功能用例的说明背景。 •以互连表格的形式说明AUTOSAR模型内容 •解释这些AUTOSAR模型的处理结果(例如C代码、A2L文件等) •完整示例的片段。存档AUTOSAR_EXP_ModelingShowCases.zip中提供了完整的示例 |
| 7 | AUTOSAR_RS_ BSWModuleDescriptionTemplate.pdf | 1. 需求索引,前缀: ”RS_BRF_*” –> ”RS_BSWMD_*” 2. 本文档收集了基本软件模块描述模板(BSWMD-T)的需求。BSWMD-T的主要目标是为BSWMD提供方案。BSWMD保存有关BSW模块或集群实现的信息,以支持ECU上的集成 |
| 8 | AUTOSAR_RS_ DiagnosticExtractTemplate.pdf | 1. 需求索引,前缀:RS_DEXT_* 2. 本文档收集了Diagnostic Extract诊断摘要的需求。 诊断摘要的主要目标是在参与诊断开发过程的不同各方之间交换诊断数据,以支持诊断模块DCM和DEM的自动代码生成过程: •交换DCM和DEM的诊断数据 •支持诊断功能的分布式开发 |
| 9 | AUTOSAR_RS_ ECUConfiguration.pdf | 1. 需求索引,前缀: ”RS_BRF_*” –> ”RS_ECUC_*” 2. ECU配置是AUTOSAR ECU开发过程中执行的一项活动。 •ECU配置的输入是系统配置描述的一部分,称为系统配置的ECU提取。ECU配置的活动是为一个ECU内的所有软件提供配置信息。 •ECU配置的输出是用于实际生成和构建ECU可执行文件的ECU配置描述。 本需求文件的主要重点是ECU配置说明的格式 |
| 10 | AUTOSAR_RS_ ECUResourceTemplate.pdf | 1. 需求索引,前缀: ”RS_Main_*” –> ”RS_ECUR_*” 2. 本文件收集了ECU资源模板(EcuR)的需求。 EcuR的主要目标是为ECU资源描述提供方案,EcuR的上下文包含: •处理单元 •内存段 •IO和通信外围设备 •微控制器 •Ecu电子设备 •传感器和致动器 |
| 11 | AUTOSAR_RS_ SoftwareComponentTemplate.pdf | 1. 需求索引,前缀: •”RS_Main_*” –> ”RS_SWCT_*” •”RS_BRF_*” –> ”RS_SWCT_*” 2. 本文档收集了软件组件模板(SWC-T)的需求: 1):AUTOSAR主要需求 2):AUTOSAR特征定义需求 3):软件组件模板需求 |
| 12 | AUTOSAR_RS_ SystemTemplate.pdf | 1. 需求索引,前缀: •”RS_Main_*” –> ”RS_SYST_*” 2. 本文件收集了系统模板(SYS-T)的需求。系统模板的主要目标是定义系统上的纯软件视图和具有联网ECU的物理系统架构之间的关系。 系统模板包括以下方面: •系统拓扑:在系统拓扑中描述了系统的逻辑布局。这意味着记录了哪个ECU连接到哪个集群或通道。 •通信属性:通信系统的中心目的是交换具有特定属性的帧。 •映射:映射包括软件组件到ECU的分布以及软件组件之间交换的数据元素到信号和帧的映射。 |
| 13 | AUTOSAR_TPS_ SoftwareComponentTemplate.pdf | 1. 需求索引,前缀: •”RS_SWCT_*” –> ”TPS_SWCT_*” 2. 本文档包含AUTOSAR软件组件模板的规范。实际上,它是作为AUTOSAR元模型对软件组件模板正式定义的补充而创建的。对软件组件的描述,包括以下三个方面: •使用PortPrototype和PortInterfaces对SwComponentType的一般描述 •CompositionSwComponentType的描述,它是由软件组件的连接实例组成的子系统 •AtomicSwComponentType的描述,它作为一个软件实现,可以映射到AUTOSAR ECU 3. 模板结构,AUTOSAR软件组件分三个不同的层次进行描述: •VFB级软件组件描述 • RTE级软件组件描述 •实现级软件组件描述 |
| 14 | AUTOSAR_TPS_ ECUConfiguration.pdf | 1. 需求索引,前缀: •”RS_ECUC_*” –> ”TPS_ECUC_*” •”SRS_BSW_*” –> ”TPS_ECUC_*” 2. 根据AUTOSAR方法,配置过程是ECU软件集成的一个主要部分。在ECU配置过程中,AUTOSAR架构的每个单个模块都可以根据该ECU的特殊需要进行配置。由于非常复杂的AUTOSAR架构、模块和模块之间的相互依赖性,需要工具支持:AUTOSAR ECU配置编辑器。配置描述分为两部分: •ECU配置参数定义:工具需要了解ECU配置参数及其约束,如配置类别、值范围、乘数等。此描述是工具的输入 •ECU配置值:ECU配置值说明一方面是其他配置工具的输入格式,另一方面是生成器的基础。配置的参数生成为ECU可执行文件 |
| 15 | AUTOSAR_MOD_ ECUConfigurationParameters.zip | ECU配置参数规范(XML): AUTOSAR_MOD_ECUConfigurationParameters.arxml |
| 16 | AUTOSAR_TPS_ ECUResourceTemplate.pdf | 1. 需求索引,前缀: ”RS_ECUR_*” –> ”TPS_ECUR_*” 2. AUTOSAR最突出的目标之一是与汽车软件应用相关的描述标准化。在此背景下,底层ECU硬件的描述是需要解决的主要问题之一。 本文档包含必要程度上描述硬件所需的建模元素规范。ECU资源模板的重点是描述已经设计好的硬件、其内容和结构。 ECU资源模板的是通过以下基本构建块描述ECU: •硬件元件 •硬件引脚组和硬件引脚 •硬件连接 |
| 17 | AUTOSAR_TPS_ TimingExtensions.pdf | 1. 需求索引,前缀: ”RS_TIMEX_*” –> ”TPS_TIMEX_*” 2. 本AUTOSAR文档包含AUTOSAR定时扩展的规范。定时扩展提供了一些描述和指定定时信息的基本方法:由事件和事件链表示的定时描述,以及施加在这些事件和事件链条上的定时约束。这两种方式,即时序描述和时序约束。 3. 时序扩展的目的有两个方面: •第一个目的是提供时序要求,以指导最终满足这些时序要求的系统的构建。 •第二个目的是提供足够的时序信息来分析和验证系统的时间行为 |
| 18 | AUTOSAR_TR_ GeneralBlueprintsSupplement.pdf | 本技术报告提供了现有蓝图的附加信息。通用蓝图在辅助包AUTOSAR_MOD_GeneralBlueprints中提供 |
| 19 | AUTOSAR_TPS_ SystemTemplate.pdf | 1. 需求索引,前缀: •”RS_SYST_*” –> ”TPS_SYST_*” 2. 本文档描述了系统模板及其在系统约束描述和系统配置描述中的使用。系统模板用于: •作为系统约束描述,它作为AUTOSAR系统生成器的输入 •作为系统配置描述,它定义了AUTOSAR系统配置生成器的输出,并作为描述中定义的不同ECU的AUTOSAR ECU配置生成器的输入。 •作为系统配置描述的ECU摘录,它描述了系统描述中ECU特定的视图。它作为AUTOSAR ECU配置生成器的输出,为每个系统的ECU单独生成。 3. 系统模板定义了五个主要元素:拓扑、软件、通信、映射和映射约束。文档做了详细介绍 |
13、Mode Management(4个)
| 5.13 | File Name | 说明 |
| 1 | AUTOSAR_EXP_ ModeManagementGuide.pdf | 本文档是4.0.3版及以上版本AUTOSAR模式管理的一般介绍: •第2章解释了基本的模式管理概念,例如一般模式、模式切换的实现方式、模式管理者和模式用户的角色等 •基本软件模式管理器是AUTOSAR R4.0中的中央模式管理模块。第3章介绍基本软件模式管理器的配置 |
| 2 | AUTOSAR_SRS_ ModeManagement.pdf | 1. 需求索引,前缀: ”RS_BRF_*” –> ”SRS_ModeMgm_*” 2. 本文件旨在定义AUTOSAR模式管理所有模块的功能和非功能需求,模式管理集群负责四个基本软件模块: •ECU状态管理器(EcuM):控制AUTOSAR BSW模块的启动阶段,包括OS的启动 •通信管理器(ComM):负责网络资源管理 •看门狗管理器(WdgM):负责根据应用软件的活动状态和控制流状态触发看门狗 •基本软件模式管理器(BswM):用于组织SW C和BSW模块的模式处理和模式相关交互 |
| 3 | AUTOSAR_SWS_ BSWModeManager.pdf | 1. 需求索引,前缀: •”SRS_BSW_*” –> ”SWS_BswM_*” •”SRS_ModeMgm_*” –> ”SWS_BswM_*” 2. 本规范规定了AUTOSAR基本软件模块BSW模式管理器(BswM)的功能、API和配置。其职责是根据简单规则仲裁来自应用层SW C或其他BSW模块的模式请求,并根据仲裁结果执行操作 3.详细api,索引到SWS_BswM_* |
| 4 | AUTOSAR_SWS_ ECUStateManager.pdf | 1. 需求索引,前缀: •”SRS_BSW_*” –> ”SWS_EcuM_*” •”SRS_ModeMgm_*” –> ”SWS_EcuM_*” 2. ECU管理器模块是管理ECU状态的常见方面的基本软件模块。具体而言,ECU管理器模块: •初始化和取消初始化操作系统、SchM和BswM以及一些基本软件驱动程序模块。 •在请求时为ECU配置休眠和关机。 •管理ECU上的所有唤醒事件 3.详细api,索引到SWS_EcuM_* |
14、RTE(2个)
| 5.14 | File Name | 说明 |
| 1 | AUTOSAR_SRS_RTE.pdf | 1. 需求索引,前缀: •”RS_BRF_*” –> ”SRS_Rte_*” •”RS_Main_*” –> ”SRS_Rte_*” 2. 本文档的目标是定义AUTOSAR运行时环境的需求和行为 3. 运行时环境(RTE)是AUTOSAR ECU架构的核心。 RTE是AUTOSAR虚拟功能总线(VFB)接口的实现,因此为应用软件组件之间的通信提供基础设施服务,并方便访问包括OS在内的基本软件组件 |
| 2 | AUTOSAR_SWS_RTE.pdf | 1. 需求索引,前缀: •”SRS_BSW_*” –> ”SWS_Rte_*” •”SRS_Rte_*” –> ”SWS_Rte_*” 2. 本文档包含AUTOSAR运行时环境(RTE)和基本软件调度器的软件规范。基本上,RTE与OS、AUTOSAR COM和其他基本软件模块一起是虚拟功能总线概念(VFB)的实现。RTE实现AUTOSAR虚拟功能总线接口,从而实现AUTOSAR软件组件之间的通信 3. 本文件结构如下: •第2章对RTE的概念进行了更详细的介绍。 •第3章描述了如何在整个AUTOSAR方法的背景下生成RTE。 •第4章是本文件的中心部分。它详细说明了RTE功能。 •RTE API见第5章 4.详细api,索引到SWS_Rte_* |
15、Application Interfaces(13个)
| 5.15 | File Name | 说明 |
| 1 | AUTOSAR_TR_ AIDesignPatternsCatalogue.pdf | 1. 需求索引,前缀: ”RS_Main_*” –> ”TR_AIDPC_*” 2.本文档概述了AUTOSAR中定义的模式,以便于使用AUTOSAR架构、AUTOSAR应用程序接口和AUTOSAR元模型。重点是应用软件(ASW) |
| 2 | AUTOSAR_MOD_ AISpecificationExamples.zip | 本文档包含用于讨论AUTOSAR标准化工作中定义的应用程序接口模型元素的示例 |
| 3 | AUTOSAR_EXP_AIUserGuide.pdf | 本文档概述了应用程序接口的方法背景。本文件还概述了“Application Interface Table”的内容、顶级(域间级别)和包含的域(车身、动力传动系统、底盘、乘员和行人安全、多媒体、远程通信、人机界面)。它还描述了AI表(在Excel表中实现)的结构,并解释了如何处理它 |
| 4 | AUTOSAR_EXP_ AIOccupantAndPedestrianSafety.pdf | 本文件提供了背景信息,例如设计决策,这些决策导致了“乘员和行人安全系统”领域的应用程序接口定义标准化。乘员和行人安全领域的目标是在发生碰撞时保护车辆乘员和行人。 “碰撞”或“事故”的概念决定了OPS的范围,使其成为事件驱动领域 |
| 5 | AUTOSAR_EXP_ AIBodyAndComfort.pdf | 本节概述了车身和舒适域。以下软件组成和组件已在车身和舒适性领域中确定: 1) Wiper/Washer雨刮器/清洗器 2) Mirror Adjustment & Tinting后视镜调整和调色 3) Interior Light车内灯 4) Seat Adjustment座椅调节 5) Central Locking中央锁定 6) Exterior Light外部照明 7) Antitheft Warning System防盗报警系统 8) Horn喇叭 9) Defrost Control除霜控制 10) Terminal Clamp Control 11) Immobilizer防盗系统 12) Seat Climatization 13) PASE (PASsive Entry) 被动进入功能 14) RKE (Remote Keyless Entry) 遥控无钥匙进入 15) Convertible Control 16) BodySensors车身传感器 17) KeyPad |
| 6 | AUTOSAR_EXP_AIChassis.pdf | 1.底盘域应用程序接口说明。参考 •图15-1 Chassis Domain overview •图15-2 Chassis Domain overview(Inter domain dependencies) •图15-3 the inter domain 2.底盘域包含的软件组成和组件: 1) CrsCtrlAndAcc Cruise Control and Adaptive Cruise Control:巡航控制和自适应巡航控制 2) Esc Electronic Stability Control (formerly known as ‘ESP’):Esc电子稳定控制系统 3) Ssm Stand-still Manager:Ssm静止管理器 4) Epb Electronic Parking Brake: Epb电子驻车制动器 5) Vlc Vehicle Longitudinal Control: 车辆纵向控制 6) Rsc Roll-Stability Control: Rsc侧倾稳定性控制 7) Steer Steering System: 转向转向系统 8) SteerDrvrAsscSys Steering Driver Assistance System (DAS): 转向驾驶员辅助系统 9) SteerVehStabyCtrl Steering Vehicle Stabilizing Control : 转向车辆稳定控制 10) Susp Suspension System: 悬架系统 11) TirePMon Tire Pressure Monitoring System: 轮胎气压监测系统 12) DtTqDistbn Drivetrain Torque Distribution (formerly known as ‘AWD’) 传动系扭矩 13) SurrndgsSnsr Surroundings Sensor环境传感器 14) ChassisSnsr Chassis Sensor底盘传感器 15) PrkgAid Parking Aid驻车辅助 |
| 7 | AUTOSAR_EXP_ AIHMIMultimediaAndTelematics.pdf | 本文件的目的是对多媒体(MM)、远程通信(T)和人机界面(HMI)子域标准化的端口和接口进行解释。 文件结构: •第3章简要介绍了MM/T/HMI领域的结构和特点。 •第4章概述了MM/T/HMI域的域架构。 •第5章介绍了标准化的MM/T/HMI端口和接口。 |
| 8 | AUTOSAR_EXP_ AIADASAndVMC.pdf | 1.本文件解释了高级驾驶员辅助系统(ADAS)接口及其软件组件的架构模式 2.本文件分四层定义了ADAS的车辆控制功能。(图15-4): 1).ADAS应用 2).ADAS-MGR 3).车辆MGR 4).域致动器(+相关域传感器):视觉传感器(例如,相机)、雷达和激光雷达 3.ADAS传感器监测车辆周围环境,并向融合层发送原始信号(原始数据)或预处理信号。融合层融合来自每个传感器的信号以识别周围条件。识别结果被发送到ADAS应用层 |
| 9 | AUTOSAR_EXP_AIPowertrain.pdf | 本文件解释了动力域标准化应用程序接口的设计决策。 域体系结构的组件: •Powertrain Coordinator – PTC (PtCoorr) • Transmission System (Trsm) 传输系统 • Combustion Engine (CmbEng) 内燃机 • Vehicle Motion relevant for Powertrain (VehMtnForPt) • Powertrain: Miscellaneous (PtMisc) |
| 10 | AUTOSAR_RS_SWCModeling.pdf | 1. 需求索引,前缀:RS_SWMG_* 2. 本文件定义了AUTOSAR中需求规范的一般规则和格式: •Naming Convention Requirements命名约定需求 • Modeling Requirements建模需求 |
| 11 | AUTOSAR_TR_ SWCModelingGuide.pdf | 1. 需求索引,前缀: •”RS_SWMG_*” –> ”TR_SWMG_*” •”RS_SWMG_*” –> ”TR_SWNR_*” 2. 本文件给出了使用AUTOSAR模型元素构建AUTOSAR系统的指南和约定。主要分各方面: •Modeling Rules建模规则 •Naming Convention for AUTOSAR Model Elements模型元素的命名约定 |
| 12 | AUTOSAR_TR_ AIMeasurementCalibration Diagnostics.pdf | 1. 需求索引,前缀: •”RS_MCR_*” –> ”TR_MCG_*” •”RS_MCR_*” –> ”TR_MCM_*” •”RS_MCR_*” –> ”TR_MCA_*” 2. 本文件专门针对动力域。对于动力领,有效处理校准和测量非常重要。本文件的重点是提出如何自动生成测量、校准和诊断工具(MCD)的names2的建议 |
| 13 | AUTOSAR_MOD_ AISpecification.zip | 应用程序接口的XML规范: 此文件夹包含ARXML文件,这些文件只包含一种类型的模型元素和一个类别 |
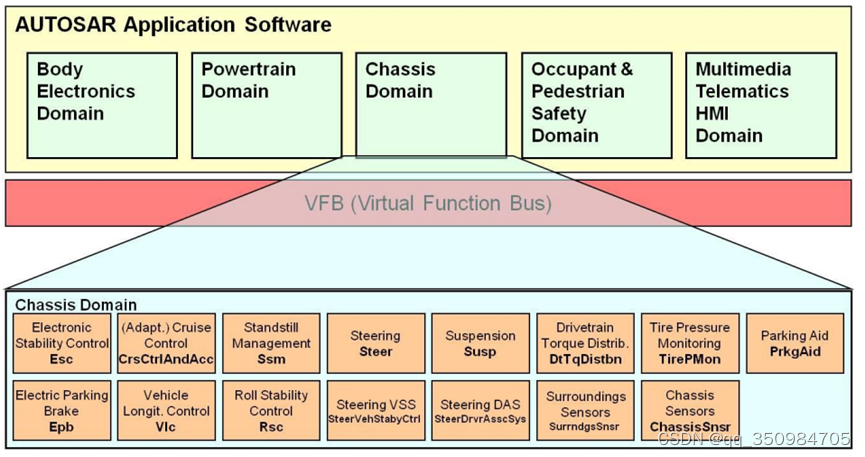
图15-1 Chassis Domain overview
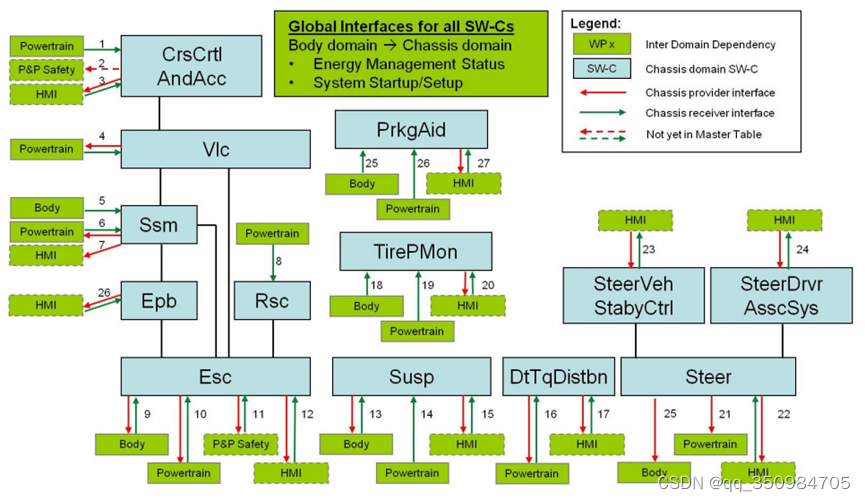
图15-2 Chassis Domain overview(Interdomain dependencies)
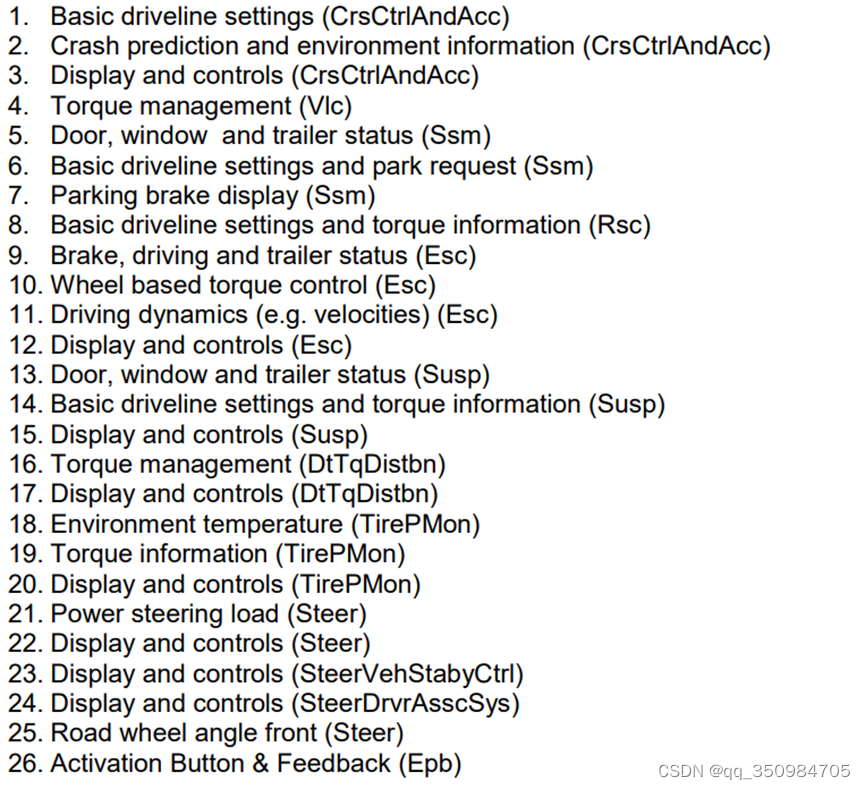
图15-3:the inter domain
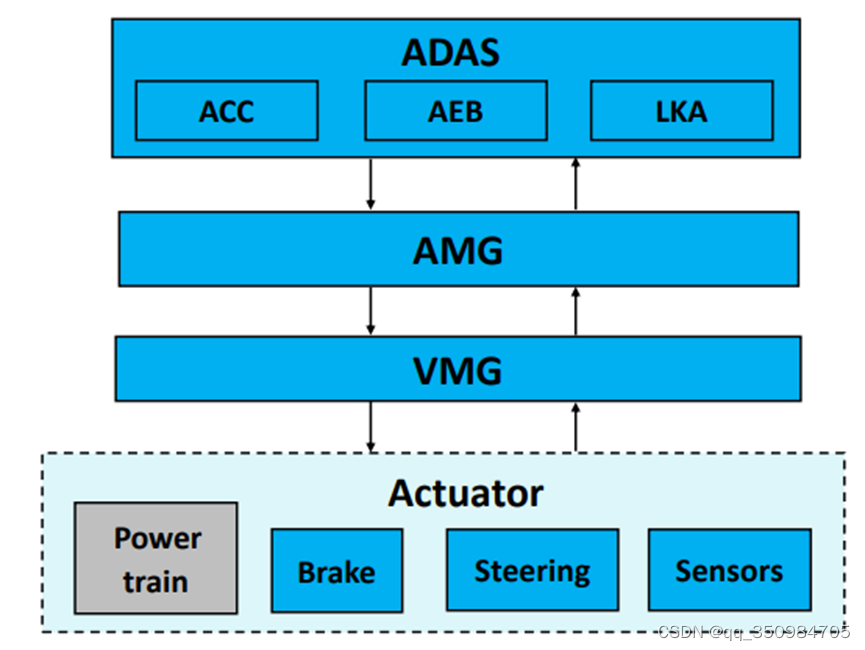
图15-4 Functional Structure of ADAS
16、Crypto(6个)
| 5.16 | File Name | 说明 |
| 1 | AUTOSAR_SRS_ CryptoStack.pdf | 1. 需求索引,前缀: ”RS_BRF_*” –> ”SRS_CryptoStack_*” 2. Crypto Stack为应用程序和系统功能提供了对加密服务的标准化访问,本文档规定了加密堆栈的要求: • Crypto Service Manager加密服务管理器(Csm), • Crypto Interface加密接口(CryIf)和 • Crypto Driver加密驱动程序(Crypto) • Key Manager密钥管理器 |
| 2 | AUTOSAR_SWS_ CryptoDriver.pdf | 1. 需求索引,前缀: •”SRS_BSW_*” –> ”SWS_Crypto_*” •”SRS_CryptoStack_*” –> ”SWS_Crypto_*” 2. 本规范规定了AUTOSAR基本软件模块加密驱动程序的功能、API和配置。Crypto驱动程序模块位于微控制器抽象层,位于Crypto接口模块和Crypto服务管理器模块之下。它实现了同步和异步加密原语的通用接口。它还支持加密服务的密钥存储、密钥配置和密钥管理 3.详细api,索引到SWS_Crypto_* |
| 3 | AUTOSAR_SWS_ CryptoInterface.pdf | 1. 需求索引,前缀: •”SRS_BSW_*” –> ”SWS_CryIf_*” •”SRS_CryptoStack_*” –> ”SWS_CryIf_*” 2. 本规范规定了AUTOSAR基本软件模块加密接口(CRYIF)的功能、API和配置。Crypto接口位于Crypto Service Manager和底层加密驱动程序之间,是访问所有上层(BSW)加密操作的唯一接口。Crypto Interface也是加密驱动程序的唯一用户,它提供了一个独特的界面来管理不同的加密硬件和软件解决方案 3.详细api,索引到SWS_CryIf_* |
| 4 | AUTOSAR_SWS_ CryptoServiceManager.pdf | 1. 需求索引,前缀: •”SRS_BSW_*” –> ”SWS_Gsm_*” •”SRS_CryptoStack_*” –> ”SWS_Gsm_*” 2. 本规范规定了加密服务管理器(CSM)软件模块的功能、API和配置。CSM通过CRYIF访问不同的CryptoDrivers。CSM作为一个服务层,为SW-C或BSW提供加密操作的接口 3.详细api,索引到SWS_Gsm_* |
| 5 | AUTOSAR_SWS_ KeyManager.pdf | 1. 需求索引,前缀: •”SRS_BSW_*” –> ”SWS_KeyM_*” •”SRS_CryptoStack_*” –> ”SWS_KeyM_*” 2. AUTOSAR KeyM模块包括两个子模块,加密密钥子模块和证书子模块。 •加密密钥子模块提供API和配置项,以引入或更新预定义的加密密钥材料。 •证书子模块提供了对证书进行操作的API和配置。它允许定义证书槽,并在PKI中使用的层次结构中关联它们。 3.详细api,索引到SWS_KeyM_* |
| 6 | AUTOSAR_EXP_ UtilizationOfCryptoServices.pdf | 本文档描述了从AUTOSAR 4.3开始的AUTOSAR指定加密功能的预期用途。加密服务包括,例如,哈希计算、非对称签名验证或数据的对称加密。在AUTOSAR中,这些服务由AUTOSAR加密堆栈提供,即: 1.加密服务管理器(CSM):CSM位于服务层上。它提供了一个抽象层,通过RTE端口机制为应用程序提供对加密服务的标准化访问。其他BSW模块和CDD可以使用CSM提供的C-API调用来使用加密服务 2.底层加密接口(CRYIF):CRYIF模块适用于硬件抽象层,它为CSM提供了一个通用接口,以连接到可用的加密驱动程序模块,并使访问独立于底层加密驱动程序 3.加密驱动程序(crypto):位于微控制器抽象层,这些模块保存不同加密硬件和软件实例的实际实现,例如外部HSM |
17、Global Time(4个)
| 5.17 | File Name | 说明 |
| 1 | AUTOSAR_SWS_ SynchronizedTimeBaseManager.pdf | 1. 需求索引,前缀: •”RS_Main_00512” –> ”SWS_StbM_*” •”RS_TS_*” –> ”SWS_StbM_*” •”SRS_BSW_*” –> ”SWS_StbM_*” 2. 本文档规定了同步时基管理器(StbM)模块的功能、API和配置。 同步时基管理器的目的是向其客户提供同步时基,即与分布式系统的其他节点上的时基同步的时基 3.详细api,索引到SWS_StbM_* |
| 2 | AUTOSAR_SWS_ TimeSyncOverCAN.pdf | 1.需求索引,前缀: •”RS_TS_*” –> ”SWS_CanTSyn_*” •”SRS_BSW_*” –> ”SWS_CanTSyn_*” 2. CanTSyn模块通过CAN总线处理时间信息的分配。文件结构: •第7章:CAN上时间同步的行为。 •模块的API在第8章中定义 •配置在第10章中定义。 3.详细api,索引到SWS_CanTSyn_* |
| 3 | AUTOSAR_SWS_ TimeSyncOverEthernet.pdf | 1.需求索引,前缀: •”RS_TS_*” –> ”SWS_EthTSyn_*” •”SRS_BSW_*” –> ”SWS_EthTSyn_*” 2. EthTSyn模块负责确保通过以太网收集和分发同步时间信息。它与StbM交互,并向StbM提供所有以太网特定功能。文件结构: •第7章:定义负责以太网时间同步的EthTSyn模块的行为。 •模块的API在第8章中定义, •配置在第10章中定义 3.详细api,索引到SWS_EthTSyn_* |
| 4 | AUTOSAR_SWS_ TimeSyncOverFlexRay.pdf | 1.需求索引,前缀: •”RS_TS_*” –> ”SWS_FrTSyn_*” •”SRS_BSW_*” –> ”SWS_FrTSyn_*” 2. FrTSyn模块处理FlexRay总线上的时间信息分配,文件结构: •第7章:定义FlexRay上的时间同步行为。 •模块的API在第8章中定义 •配置在第10章中定义 3.详细api,索引到SWS_FrTSyn_* |
18、 SWArch(3个)
| 5.18 | File Name | 说明 |
| 1 | AUTOSAR_EXP_ ClassicPlatformARTI.pdf | ARTI是一套用于调试和跟踪嵌入式系统运行时行为的标准。ARTI描述了支持(a)静态调试和(b)动态跟踪所需的接口 |
| 2 | AUTOSAR_RS_ ClassicPlatformDebugTraceProfile.pdf | 1. 需求索引,前缀: ”RS_Main_*” –> ”SRS_ARTICP_*” 2. 本文件细化了RS_ARTI_915中规定的需求,它侧重于AUTOSAR经典平台的定义ARTI扩展的所有需求 |
| 3 | AUTOSAR_SWS_ ClassicPlatformARTI.pdf | 1. AUTOSAR运行时接口(“ARTI”),用于调试和跟踪AUTOSAR模块。 ARTI定义了构建工具和调试/跟踪工具之间的接口。然后,调试/跟踪工具应将跟踪信息转发给跟踪/时序分析工具 2. ARTI应特别提供 •支持“操作系统意识”,例如检查操作系统特定任务、线程等。 •支持分布式系统和多核 •支持其他AUTOSAR模块(例如CP中的RTE或AP中的ARA) •支持基于仪器的跟踪和测量解决方案 •支持TIMEX |
19、Security(1个)
| 5.19 | File Name | 说明 |
| 1 | AUTOSAR_SWS_ IntrusionDetectionSystemManager.pdf | 1. 需求索引,前缀: ”RS_IDS_*” –> ”SWS_IdsM_*” 2. 本规范描述了AUTOSAR基本软件模块入侵检测系统管理器(IdsM)的功能、API和配置。软件组件IdsM提供用于接收车载安全事件SEv的通知的标准化接口。SEV可由在基本软件模块(BSW)和应用软件组件(SW-C)中实现的安全传感器报告。 IdsM过滤并将报告的SEV转换为合格的车载安全事件(QSEv)。QSEv由IdsM进一步处理以用于存储或转发。 可用的接收器是诊断事件管理器(Dem)模块和IDS报告器模块(IdsR),它们可以将QSEv数据传递到后端的安全操作中心(SOC) 3.详细api,索引到SWS_IdsM_* |
(完)


)






)





![P9420 [蓝桥杯 2023 国 B] 子 2023 / 双子数](http://pic.xiahunao.cn/P9420 [蓝桥杯 2023 国 B] 子 2023 / 双子数)
)


-文件包含)