欢迎关注微信公众号 “四足机器人研习社”,本公众号的文章和资料和四足机器人相关,包括行业的经典教材、行业资料手册,同时会涉及到职业知识学习及思考、行业发展、学习方法等一些方面的文章。
|1.URDF介绍
一个URDF pakage示例
urdf是ROS用于描述机器人所有元素的模型文件,采用XML格式书写,全称是United Robotics Description Format,即统一机器人描述格式;而xacro则是升级版的urdf,简化了urdf模型,用于复杂机器人的建模。
URDF在机器人领域很流行,尤其是在ROS社区中,机器人三维模型可视化主要用的就是URDF。一个URDF文件包就是一个ros的pakage,当你有了URDF包之后,就可以在RVIZ或者gazebo进行可视化或者仿真,当然,很多其他机器人仿真软件也支持URDF文件或者也有相应插件支持转换,如webots虽然不支持urdf文件,但是可以通过一个插件进行转换。
一般来说创建URDF模型的第一步是创建机器人功能包,并在此功能包中创建所需的文件夹结构。一般来说,至少需要以下文件夹:
-
urdf:用于存放机器人模型的URDF文件或xacro文件;
-
config:用于保存rviz配置文件;
-
launch:用于保存相关启动文件;
meshes:用于放置URDF中引用的模型渲染文件,一般可以是stl格式的三维模型文件。
meshs文件夹,存放模型的外观文件
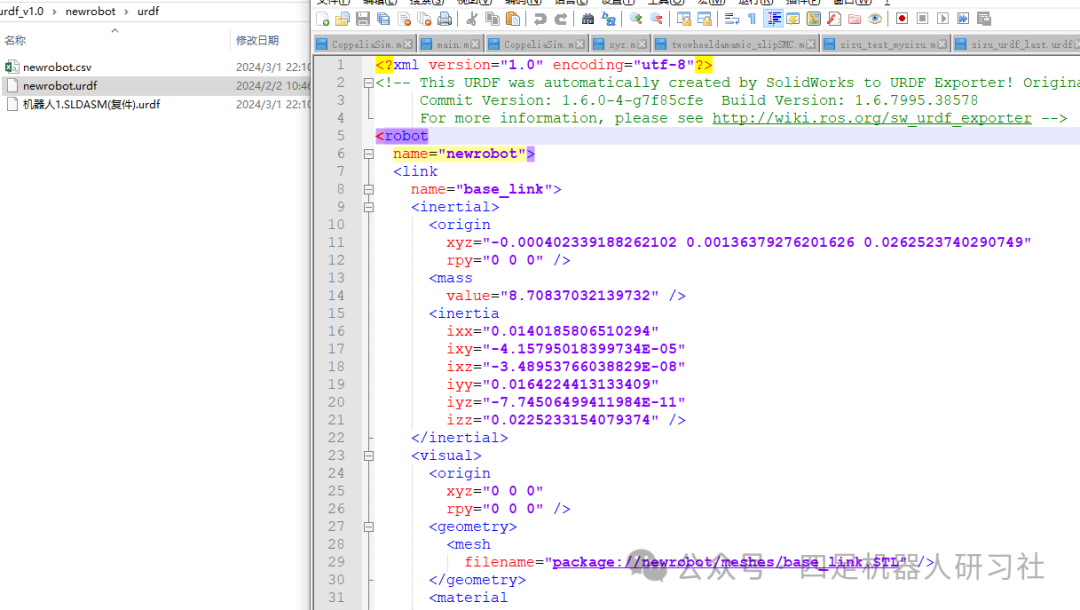
urdf文件夹中的urdf文件示例
在创建了文件夹结构后,我们需要编写launch文件,调用mbot_base.urdf文件,并在rviz文件夹下放置rviz的配置文件。这样做是为了启动和配置机器人模型。
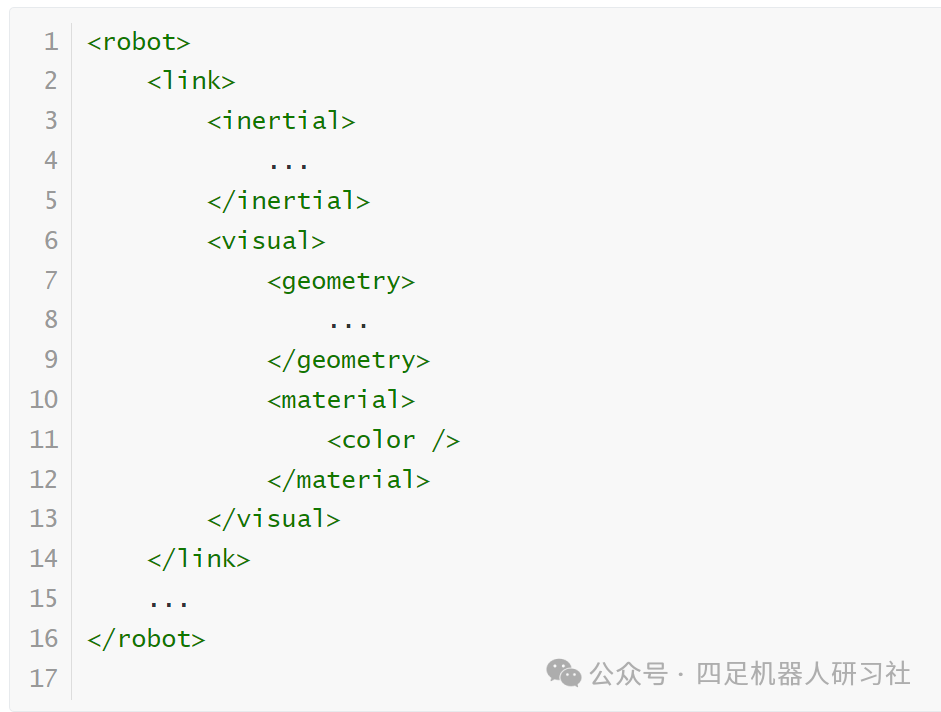
URDF文件里面有着与XML语言格式。要定义好一个机器人,首先你得知道机器人有什么。一个机器人主要由连杆(link)和关节(joint)组成, URDF具有类似XML树状结构的,比如下面的例子:
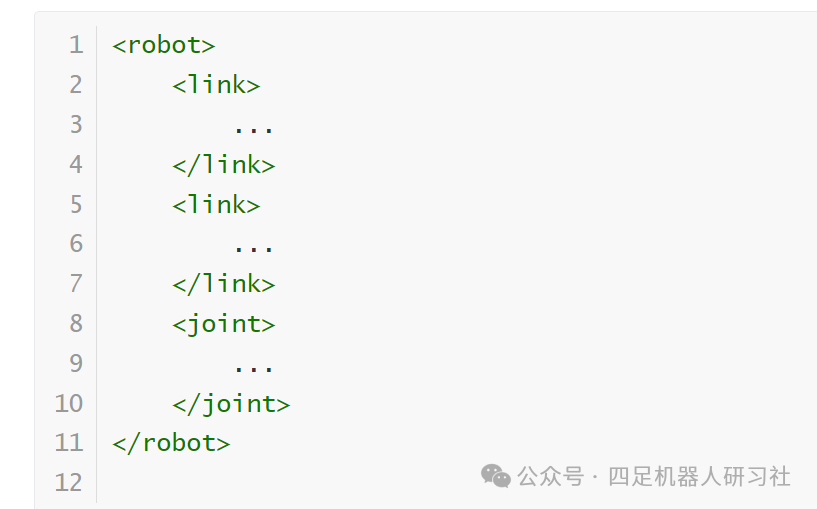
URDF文件结构
上面的 link 与 joint 是 robot 下面的孩子,换句话说 joint 和 link 隶属于 robot 。知道了机器人的基本构成之后还不够,还需要知道基本组成部分的一些物理信息,例如连杆的质量属性,惯量属性,颜色,以及关节的种类,这到底是转动关节还是平动关节。因此 link 和 joint 也要有自己的子分量,比如 inertial 和 visual , visual 下面还可以再次细分 geometry 和 material ,然后 material 下面还可以有自己的子分量,由此往复我们就可以用URDF来充分定义好一个机器人的各个信息。所以一个增加了这些额外信息的URDF文件内容例子如下
我们定义好了机器人的组成部分以及各个部分所具有的信息,接着还需要有属性描述这些量。比如 robot,link,joint 都有 name属性,一个用来辨识模块的字符串。color 有 rgba 属性,用来定义连杆的外表颜色。添加了相关信息的URDF文件长这个样子:

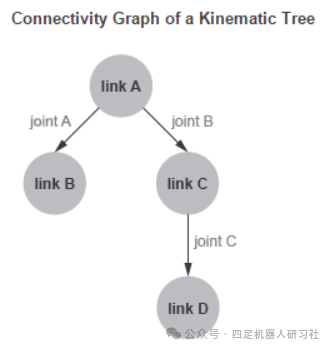
在几何结构中,它们是这样子的,连杆link之间以关节joint连接,形成一种树状结构,一般树的根节点就是机器人的基坐标系base_link
完成了URDF文件的编写,就可以通过ROS(Robot Operating System)进行编译和验证。我们说过,一个URDF文件包就是一个ros的pakage,这样我们可以像正常运行ros pakage一样,新建工作空间并初始化,然后把urdf包放到src文件中,回到工作空间进行编译,编译后的URDF文件可以通过roslaunch命令进行启动和验证。同时,我们还可以使用urdf_to_graphviz工具将URDF文件转换为PDF格式,以便更直观地查看模型的整体结构图。
|2.SW2URDF插件
大多数时候我们并不需要直接手写URDF文件,我i们可以直接通过三维建模软件建立机器人三维模型后使用插件直接导出为URDF文件,以solidworks为例:
|2.1.sw导出为urdf
假设你已经建立好了机器人三维模型,那么接下来只需要按照以下步骤即可获得urdf文件:
-
下载安装插件:地址如下:
sw2urdf插件链接地址:ROS/solidworks_urdf_exporter (github.com)如果上不了github的朋友可以通过百度云下载:
链接:https://pan.baidu.com/s/1TfldLXv0vVJJb2GtSVpfGg?pwd=1024,提取码:1024

-
打开solidworks并打开所需要转换的三维文件
依次在各个关节建立坐标轴和坐标系,如下图
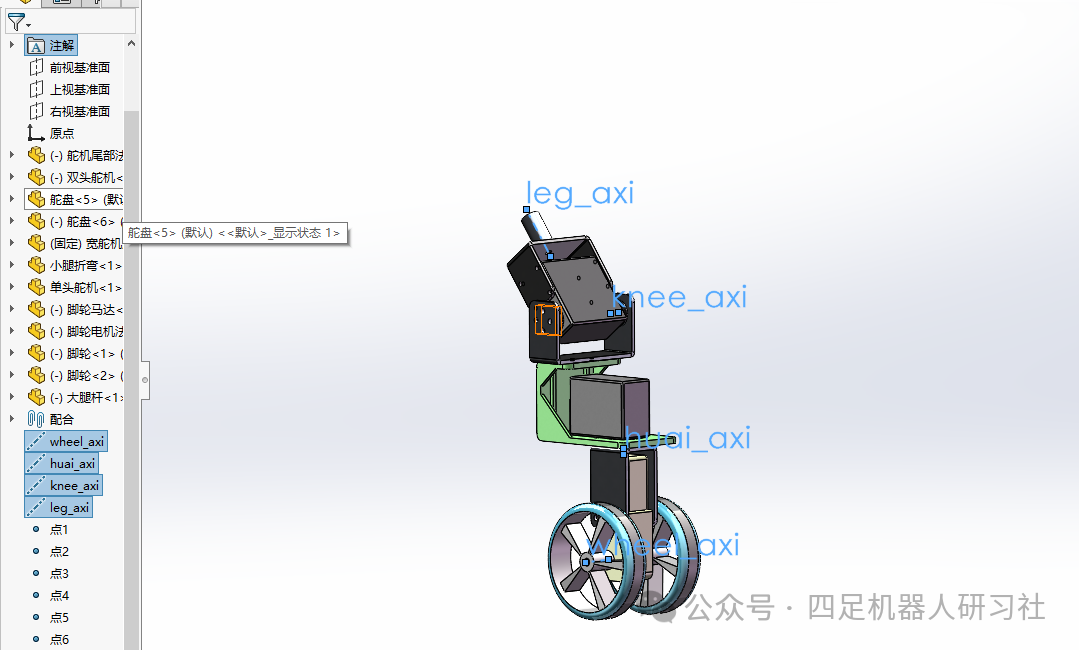
在个关节建立坐标轴和坐标系
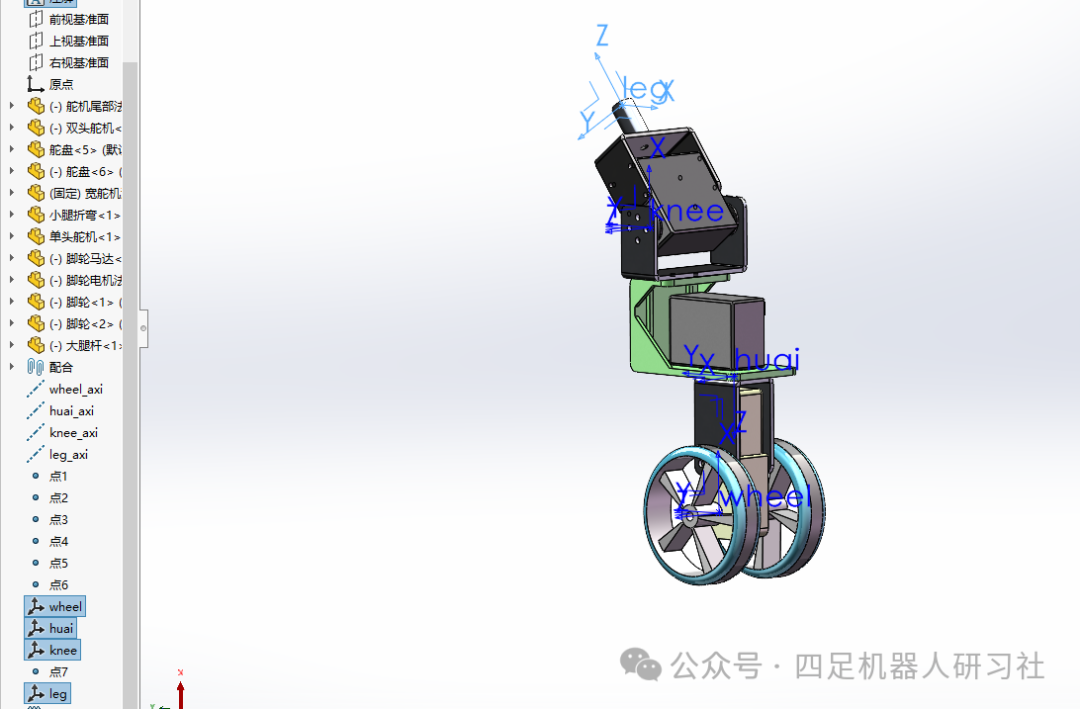
建立坐标系
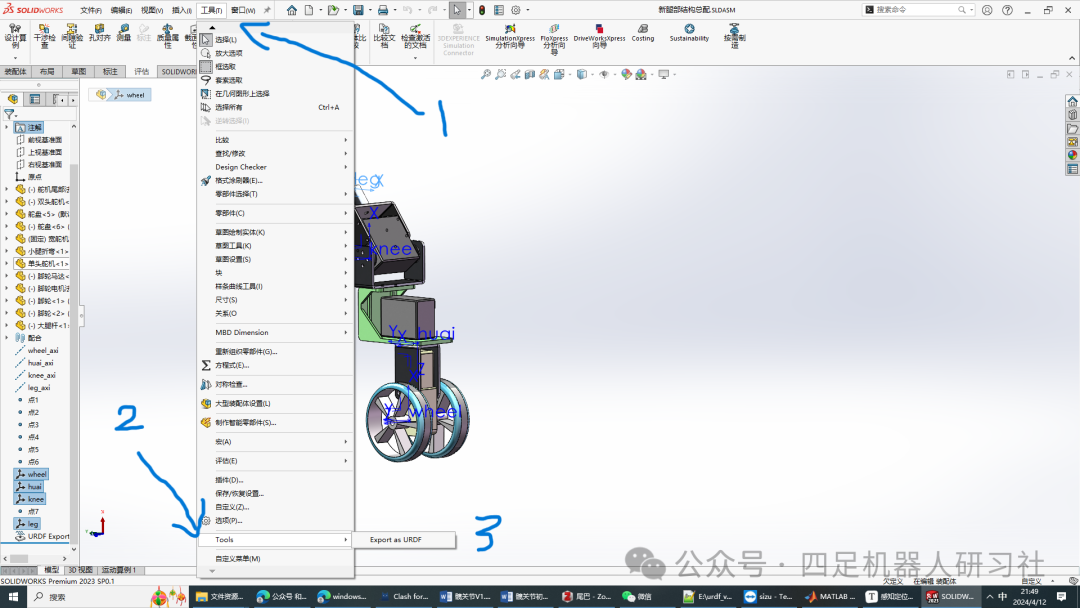
然后点击工具——tools——找到插件,点击插件,如下图
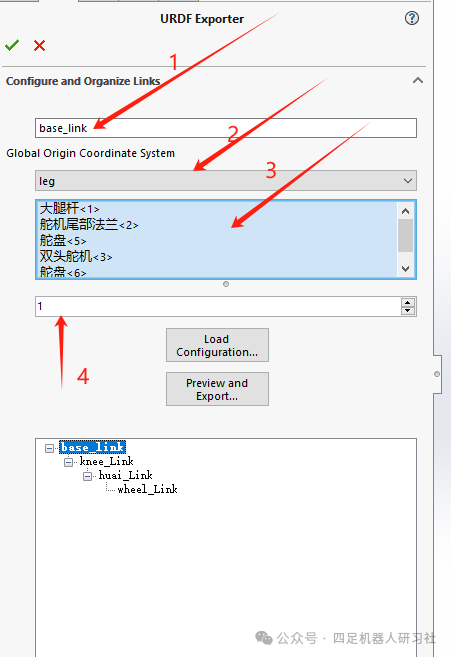
1这里命名连杆——2选择坐标系——3选择相应零件——4这里点击👆👇可以增加或者减少子连杆,如下图
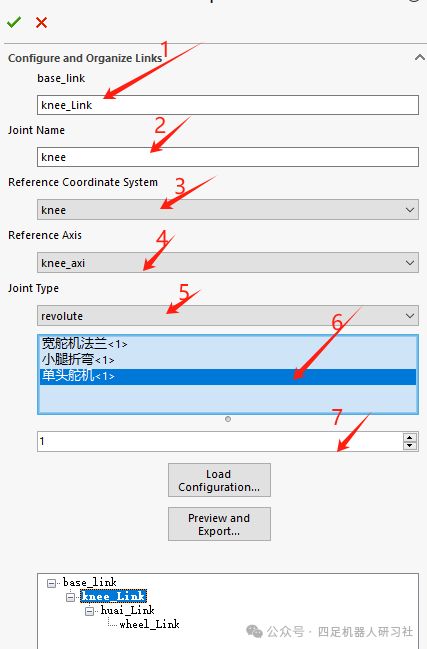
同理设置第二个连杆:1——设置连杆名字——2设置关节名字——3选择关节坐标系——4选择关节轴——5选择关节类型,其中revolute是有关节限位的,是一般的机器人关节类型,而continous是无限旋转的,如车轮关节,prismatic是平移关节,fixed固定连接,如激光雷达固连在机器人身上——6依次选择连杆的零件——7设置子连杆数量,如下图
设置步骤
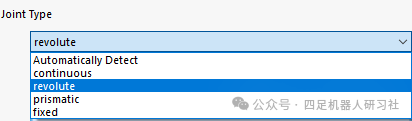
几种关节类型
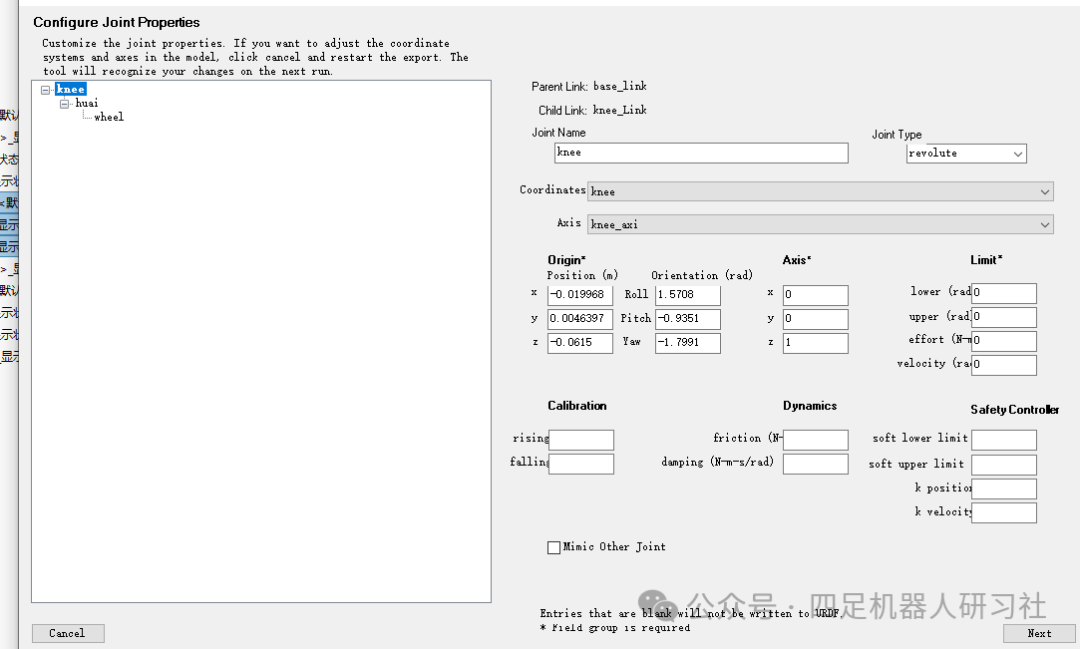
接着导出,选择Preview and Export..,之后界面如下:这里可以检查以下相关设置,如坐标系,旋转轴旋转方向(0是不转,1是旋转),关节限位大小等,如下图
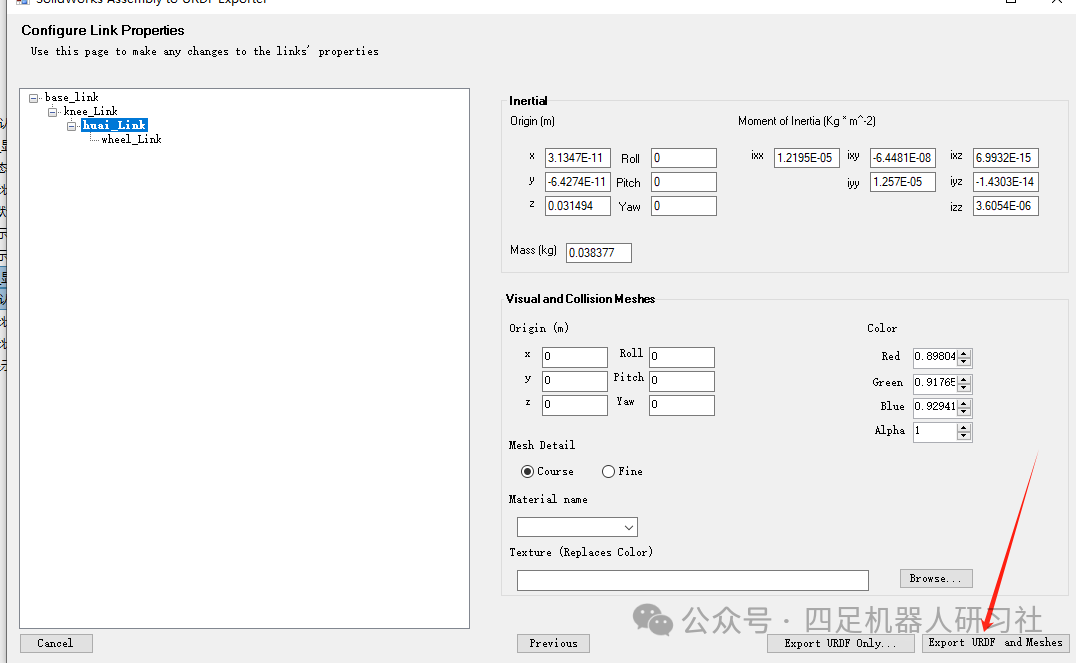
然后点击next,如果没问题可以点击导出了;点击Export URDF and Meshes,这样会同时生成stl文件,作为其三维外观,如下图
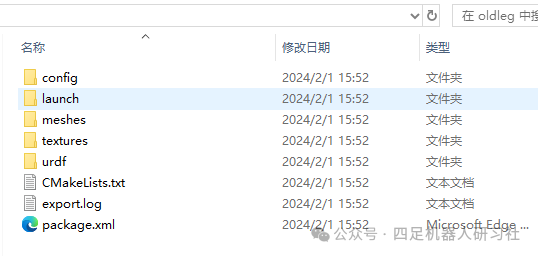
稍等一会儿,大功告成!如下图:
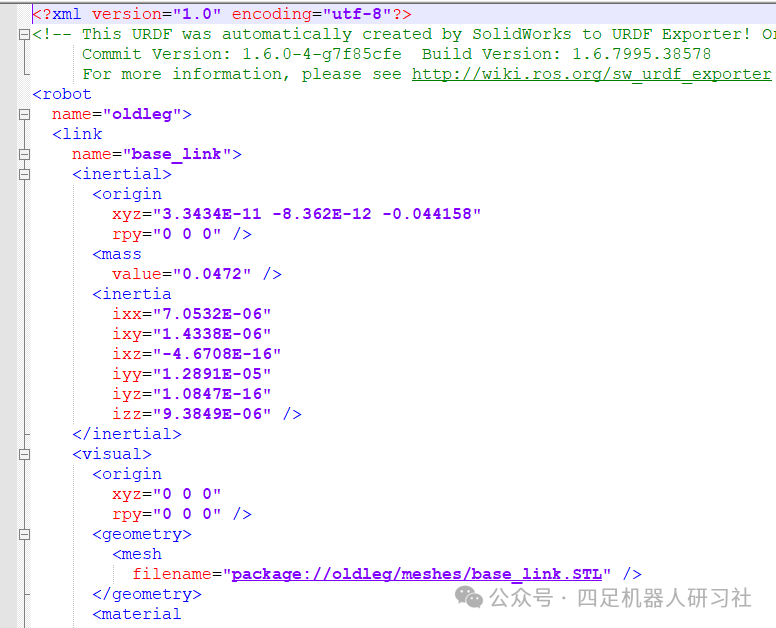
导出完成后可以检查一下.urdf文件,再次检查有没有错误。然后就可以使用URDF文件包在ros环境或者其他支持URDF文件的环境仿真了!!!
参考:
[1]URDF学习(一)什么是URDF以及怎么理解一个URDF文件-CSDN博客

【MySQL版本】)

)



)

)


Jenkins详细介绍和15天学习计划)
![【洛谷 P8802】[蓝桥杯 2022 国 B] 出差 题解(带权无向图+单源最短路+Dijkstra算法+链式前向星+最小堆)](http://pic.xiahunao.cn/【洛谷 P8802】[蓝桥杯 2022 国 B] 出差 题解(带权无向图+单源最短路+Dijkstra算法+链式前向星+最小堆))





