本教程基于韦东山百问网出的 DShanMCU-RA6M5开发板 进行编写,需要的同学可以在这里获取: https://item.taobao.com/item.htm?id=728461040949
配套资料获取:https://renesas-docs.100ask.net
瑞萨MCU零基础入门系列教程汇总: https://blog.csdn.net/qq_35181236/article/details/132779862
第31章 WIFI&蓝牙模块驱动实验
本章目标
- 了解WiFi蓝牙芯片W800的通信协议;
- 学会使用串口收发AT指令实现开发板联网;
31.1 W800出厂固件烧写
烧写W800的固件时,需要使用X/Y modem串口协议。因而需要支持X/Y modem协议的串口工具,本书使用Xshell。
31.1.1 Xshell软件安装
免费体验版的Xshell下载入口地址是:
https://www.xshell.com/zh/free-for-home-school/
进入网站填写信息后,Xshell官方会将免费下载链接下发到填写的邮箱:


将邮箱中的链接复制粘贴到浏览器即可进行下载,下载安装。
31.1.2 Xshell的使用
Xshell安装好之后,双击运行软件,在弹出的会话窗口点击“新建”添加串口连接:

然后在“连接”项中将协议设置为“Serial”,如下图所示:

接着去“连接”中的“串口”处选择串口号(下图的COM20只是一个例子,按照下一节的说明使用USB串口连接W800后,端口好可能不一样)和设置通信参数,如图所示:

设置好之后点击右下角的“连接”即可连接指定串口设备了。
31.1.3 硬件连接
W800的硬件接口图如下:

按上图将硬件连接好之后,使用Xshell打开串口,随后再将上图的WIFI_RESET引脚短接GND复位W800,之后W800就会一直往Xshell发送字符’C’,如下图所示:

进入此状态后,就可以按照下节内容烧写固件了。
31.1.4 固件烧写步骤
W800进入烧写状态后,在Xshell的显示窗口点击鼠标右键,选择“传输”->“YMODEM(Y)”->“用YMODEM发送(S)”,如下图所示:

随后进入资料包中固件所在位置,选择w800.fls开始烧写:

最后等待传输烧写完毕:
烧写完成后W800会继续对外输出’C’表示还在烧写状态,此时将BOOT引脚与GND断开,并且再次手动复位W800,就可以让W800进入正常工作状态,如下图所示:

当Xshell打印出“user task”后,就表明W800已经进入工作状态了。此时可以在Xshell窗口直接输入指令“AT+”并车键(Xshell不会显示输入指令),如果返回“+OK”固件烧写成功了,如下图所示:

31.2 AT+指令简介
W800的固件AT+指令,在官方手册《WM_W800_SDK_AT指令用户手册.pdf》中有详细描述,这个文档已经放到本书的配套资料中。
W800支持的AT+指令非常的多,本书仅展现几个常用的指令。
| 指令 | 指令格式 | 响应 | 说明 |
|---|---|---|---|
| AT+ | “AT+\r\n” | “+OK\r\n\r\n” | 测试指令,响应+OK表示测试成功 |
| AT+Z | “AT+Z\r\n” | “+OK\r\n\r\n” | 软件复位,响应+OK表示复位指令发送成功,复位后会响应“user task” |
| AT+E | “AT+E\r\n” | “+OK\r\n\r\n” | 回显切换指令,输入一次切换一次状态,在回显状态下W800会连带指令和结果一起响应 |
| AT+RSTF | “AT+RSTF\r\n” | “+OK\r\n\r\n” | 恢复FLASH中的出厂设置。恢复后的设置需系统重启后才能生效 |
| AT+WPRT | “AT+WPRT=[!?][type]\r\n”例如:AT+WPRT=0\r\n | “+OK[=type]\r\n\r\n”例如:+OK=0\r\n\r\n | 设置 /查询无线网络类型:l 0:STA;l 2:SoftAP;l 3:APSTA |
| AT+WSCAN | “AT+WSCAN\r\n” | “+OK=……” | 该指令仅在无线网络类型为 STA时有效,用于扫描无线网络,完成后返回。 |
| AT+SSID | “AT+SSID=[!?][SSID]”例如:AT+SSID=100ask\r\n | “+OK[=ssid]\r\n” | 设置 /查询无线网络名称,即 SSID |
| AT+KEY | “AT+KEY=[!?][format],[index],[key]\r\n” | “+OK[=format,index,key]\r\n” | 设置 /查询网络密钥 |
| AT+WJOIN | “AT+WJOIN\r\n” | “+OK=<bssid>,<type>…\r\n” | 如果当前网络类型为为 STA 时,本指令功能为连接 AP。如果当前网络类型SoftAP或者APSTA 时,本指令功能为创建 |
| AT+WLEAV | “AT+WLEAV\r\n” | “+OK\r\n\r\n” | 无线网络类型为 STA时,用于断开当前无线网络。 |
| AT+NIP | “AT+NIP=[!?][type]…\r\n” | “+OK[=type]…\r\n” | 当 无线网卡作为STA时,该指令用于设置 /查询本端 IP地址。 |
| AT+LKSTT | “AT+LKSTT\r\n” | +OK[=status,ip,netmask,gateway,dns1,dns2]\r\n\r\n | 查询本端网络连接状态 |
| AT+SKCT | “AT+SKCT=[protocol]…\r\n” | “+OK=<socket>\r\n” | 建立 socket。在 client模式,等待连接完成(成功或失败)后返回;在 server模式下,创建完成后直接返回。 |
| AT+SKCLS | “AT+SKCLS=<socket>\r\n” | “+OK\r\n\r\n” | 关闭指定的socket。 |
| AT+SKSND | “AT+SKSND=[socket],[size]\r\n” | “+OK\r\n\r\n” | 响应OK后发送数据流 |
| AT+SKRCV | “AT+SKRCV=[socket],[size]\r\n” | “+OK\r\n\r\n” | 响应OK后会将rxdata中的数据发送到串口 |
31.3 模块配置
本实验只使用到UART,请参考前文的操作在FSP中配置UART及其引脚。本次实验仅展示配置结果。
31.3.1 硬件连接
板载W800的原理图如下图所示:
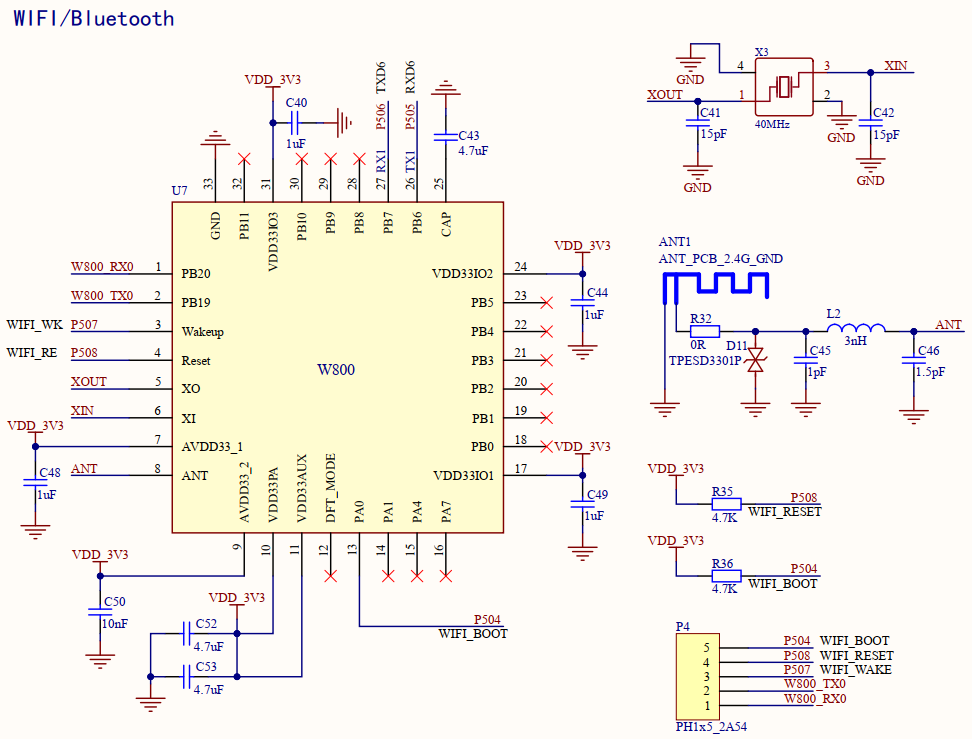
使用到的RA6M5处理器引脚是P505和P506,对应于SCI的UART6的TX/RX引脚。
31.3.2 UART模块配置
- UART6

- UART7

31.4 驱动程序
31.4.1 设备对象封装
在《30.3设备对象封装》的基础上,对定时器的设备对象进行了改进,添加了一个Timeout函数,它实现了延时函数。代码如下:
static struct TimerDev gSystickDevice = {.name = "Systick",.channel = 0xFF,.status = 0,.Init = SystickInit,.Start = NULL,.Stop = NULL,.Read = NULL,.Timeout = HAL_Delay,.next = NULL
};
void SystickTimerDevicesCreate(void)
{TimerDeviceInsert(&gSystickDevice);gSystickDevice.Init(&gSystickDevice);
}
static int HAL_Delay(struct TimerDev *ptdev, uint32_t timeout)
{if(NULL == ptdev) return -EINVAL;if(0 == ptdev->status) return -EIO;uint32_t dwStart = dwTick;uint32_t dwWait = timeout;/* Add a freq to guarantee minimum wait */if (dwWait < HAL_MAX_DELAY){dwWait += (uint32_t)(1);}while((dwTick - dwStart) < dwWait){}return ESUCCESS;
}
31.4.2 初始化UART
本次实验会用到两个UART:
- UART6:和WiFi蓝牙芯片W800通信;
- UART7:调试打印;
对于UART6,由于W800每次收发的数据长度是不确定的,不适合用DTC或者DMA来辅助传输数据,因而使用环形缓冲区。在初始化UART6的时候申请了一个环形缓冲区,而UART7作为调试串口,没有使用环形缓冲区。代码如下:
static struct RingBuffer *gWiFiBuffer = NULL;
static struct UartDev gWiFiDevice = {.name = "WiFi Uart",.channel = 6,.Init = UARTDrvInit,.Read = UARTDrvRead,.Write = UARTDrvWrite,.next = NULL
};
void UartDevicesCreate(void)
{UartDeviceInsert(&gLogDevice);UartDeviceInsert(&gWiFiDevice);gLogDevice.Init(&gLogDevice);
}
static int UARTDrvInit(struct UartDev *ptdev)
{if(NULL == ptdev) return -EINVAL;switch(ptdev->channel){case 0:case 1:case 2:case 3:case 4:case 5:case 6:{fsp_err_t err = g_uart6.p_api->open(g_uart6.p_ctrl, g_uart6.p_cfg);assert(FSP_SUCCESS == err);gWiFiBuffer = RingBufferNew(1024);assert(NULL != gWiFiBuffer);break;}case 7:{fsp_err_t err = g_uart7.p_api->open(g_uart7.p_ctrl, g_uart7.p_cfg);assert(FSP_SUCCESS == err);break;}case 8:case 9:break;default:break;}return ESUCCESS;
}
31.4.3 中断回调函数
对于UART6和UART7,需要提供中断回调函数。它们的操作是类似的,UART6需要处理“发送完成”和“接收完成”两种情况,而UART7只需要处理“发送完成”。UART6的中断回调函数代码如下:
void uart6_callback(uart_callback_args_t * p_args)
{switch(p_args->event){case UART_EVENT_RX_COMPLETE:{break;}case UART_EVENT_TX_COMPLETE:{gUart6TxCplt = true;break;}case UART_EVENT_RX_CHAR:{gWiFiBuffer->Write(gWiFiBuffer, (unsigned char*)&p_args->data, 1);break;}case UART_EVENT_ERR_PARITY:case UART_EVENT_ERR_FRAMING:case UART_EVENT_ERR_OVERFLOW:case UART_EVENT_BREAK_DETECT:case UART_EVENT_TX_DATA_EMPTY:break;default:break; }
}
- 第11行:将UART6的发送完成标志写为true;
- 第16行:如果接收到数据,将它写入到UART6的缓冲区中;
31.4.4 UART发送函数
UART设备的发送函数比较简单,调用UART6和UART7设备结构体的write函数即可:
static int UARTDrvWrite(struct UartDev *ptdev, unsigned char * const buf, unsigned int length)
{if(NULL == ptdev) return -EINVAL;if(NULL == buf) return -EINVAL;if(0 == length) return -EINVAL;switch(ptdev->channel){case 0:case 1:case 2:case 3:case 4:case 5:case 6:{fsp_err_t err = g_uart6.p_api->write(g_uart6.p_ctrl, buf, length);assert(FSP_SUCCESS == err);UART6WaitTxCplt();break;}case 7:{fsp_err_t err = g_uart7.p_api->write(g_uart7.p_ctrl, buf, length);assert(FSP_SUCCESS == err);UART7WaitTxCplt();break;}case 8:case 9:break;default:break;}return ESUCCESS;
}
31.4.5 UART数据读取函数
对于UART6,读取UART的数据时,是从它的环形缓冲区里读取数据。对于UART7,调用FSP封装的函数读数据。代码如下:
static int UARTDrvRead(struct UartDev *ptdev, unsigned char *buf, unsigned int length)
{if(NULL == ptdev) return -EINVAL;if(NULL == buf) return -EINVAL;if(0 == length) return -EINVAL;switch(ptdev->channel){case 0:case 1:case 2:case 3:case 4:case 5:case 6:{if(gWiFiBuffer->Read(gWiFiBuffer, buf, length) != length)return -EIO;break;}case 7:{fsp_err_t err = g_uart7.p_api->read(g_uart7.p_ctrl, buf, length);assert(FSP_SUCCESS == err);UART7WaitRxCplt();break;}case 8:case 9:break;default:break;}return (int)length;
}
31.5 W800 WiFi蓝牙模块
WiFi蓝牙模块的设备驱动代码在Devices/wifi_bluetooth文件夹中,文件dev_wifi_bt.c/.h。
31.5.1 初始化W800
要初始化W800,实际是初始化W800用到的串口设备,即初始化UART6:
static UartDevice *pWiFiBtDev = NULL;
int WiFiBtDevInit(void)
{pWiFiBtDev = UartDeviceFind("WiFi");if(NULL==pWiFiBtDev) return -ENXIO;if(pWiFiBtDev->Init(pWiFiBtDev) != ESUCCESS) return -EIO;return ESUCCESS;
}
31.5.2 AT+指令返回判定
在AT+指令简介中已经直到,每个AT+指令都有其对应的响应。对于大多数指令,只需要判断它收到的回应是不是“+OK”即可。将这个功能封装为如下函数:
static int WiFiBtDevCmdRet(const char *ret)
{unsigned short timeout = 3000;unsigned char i = 0;unsigned char buf[128] = {0};while(timeout){if(strstr((char*)buf, ret)){return ESUCCESS;}else if(strstr((char*)buf, "+ERR")){return -EIO;}else if(pWiFiBtDev->Read(pWiFiBtDev, &buf[i], 1)==1){printf("%c", buf[i]);i++;}mdelay(1);timeout--;}return -EIO;
}
- 第08行:如果接收的数据中读出来有指定响应字符串,就返回ESUCCESS;
- 第12行:如果响应中有“+ERR”就表示指令失败,返回-EIO;
- 第16行:如果想要的响应或者错误响应都没有,则继续从缓冲区中读取数据并打印出来;
- 第21~22行:超时等待倒计时,如果是超时退出则返回-EIO;
31.5.3 设置W800的工作模式
W800的WiFi功能有3个工作模式:STA、SoftAP和APSTA,定义了一个枚举类型:
typedef enum{STA = 0,SoftAP = 2,APSTA = 3
}WorkType;
发出指令“AT+WPRT=<type>\r\n”(注意必须要有’\r’),就可以设置W800的工作模式。具体的实现很简单,调用UART设备的write函数发送这个字符串,然后等待响应即可。代码如下:
int WiFiBtDevSetWorkType(WorkType type)
{char str[64];sprintf(str, "AT+WPRT=%d\r\n", type);if(pWiFiBtDev->Write(pWiFiBtDev, (unsigned char*)str, strlen(str)) != ESUCCESS)return -EIO;mdelay(100);return WiFiBtDevCmdRet("+OK");
}
31.5.4 设置W800的DHCP状态
如果想让W800在连接上了热点之后自动获得IP地址,则需要使能W800的DHCP功能;如果想要固定W800的IP地址,则需要关闭DHCP自动分配功能,并且指定IP。
使能DHCP功能的指令是“AT+NIP=0\r\n”,代码如下:
int WiFiBtDevEnableDHCP(void)
{int ret = -EIO;char *str = "AT+NIP=0\r\n";ret = pWiFiBtDev->Write(pWiFiBtDev, (unsigned char*)str, strlen(str));if(ESUCCESS!= ret) return ret;mdelay(100);ret = WiFiBtDevCmdRet("+OK");return ret;
}
要手工设置IP,使用指令“AT+NIP=1,[IP],[net_mask],[gate_way]\r\n”,它会关闭DHCP功能、指定IP、子网掩码和默认网关。代码如下:
int WiFiBtDevDisableDHCP(const char *ip, const char *netmask, const char *gateway)
{int ret = -EIO;char str[64];sprintf(str, "AT+NIP=1,%s,%s,%s\r\n", ip, netmask, gateway);ret = pWiFiBtDev->Write(pWiFiBtDev, (unsigned char*)str, strlen(str));if(ESUCCESS!= ret) return ret;mdelay(100);ret = WiFiBtDevCmdRet("+OK");return ret;
}
31.5.5 连接指定热点
连接热点需要3个指令:
- 设置热点的名称:AT+SSID=[SSID]\r\n;
- 设置连接热点的密码:AT+KEY=[密钥格式],[密钥索引号],[密钥字符串]\r\n;
- 连接热点:AT+WJOIN\r\n;
对于设置密钥的参数,手册中是这样解释的:
- 密钥格式:0-Hex格式;1-ASCII格式;
- 密钥索引号:1~4用于WEP加密密钥,其它加密方式固定为0;
- 密钥字符串:以双引号包围,根据不同的安全模式,密钥使用的长度与格式要求定义如下:

本实验将连接热点的三个指令封装到一个函数中,调用者只需要传入连接热点的名称和密码即可:
int WiFiBtDevConnectWiFi(const char *name, const char *password)
{int ret = -EIO;char ssid[32];sprintf(ssid, "AT+SSID=%s\r\n", name);ret = pWiFiBtDev->Write(pWiFiBtDev, (unsigned char*)ssid, strlen(ssid));if(ESUCCESS != ret) return ret;mdelay(100);ret = WiFiBtDevCmdRet("+OK");if(ESUCCESS != ret) return ret;char key[32] ;sprintf(key, "AT+KEY=1,0,%s\r\n", password);ret = pWiFiBtDev->Write(pWiFiBtDev, (unsigned char*)key, strlen(key));if(ESUCCESS != ret) return ret;mdelay(100);ret = WiFiBtDevCmdRet("+OK");if(ESUCCESS != ret) return ret;char join[32] = "AT+WJOIN\r\n";ret = pWiFiBtDev->Write(pWiFiBtDev, (unsigned char*)join, strlen(join));if(ESUCCESS != ret) return ret;mdelay(100);ret = WiFiBtDevCmdRet("+OK");int ret1 = WiFiBtDevCmdRet("\r\n\r\n");if(ret==ESUCCESS && ret1)mdelay(1000);return ret;
}
31.5.6 断开热点连接
断开热点的连接,只需要发送指令“AT+WLEAV\r\n”即可,代码如下:
int WiFiBtDevDisconnectWiFi(void)
{int ret = -EIO;char *leavw = "AT+WLEAV\r\n";ret = pWiFiBtDev->Write(pWiFiBtDev, (unsigned char*)leavw, strlen(leavw));
if(ESUCCESS != ret) return ret;
mdelay(100);
ret = WiFiBtDevCmdRet(“+OK”);
return ret;
}
31.5.7 获取本地IP
当连接了热点并且使能了DHCP自动获取IP功能,用户可能想要知道本机分配的IP地址是多少,这时候就需要使用指令“AT+LKSTT\r\n”来查询本机IP了,代码如下:
int WiFiBtDevGetLocalIP(void)
{int ret = -EIO;char lkstt[32] = "AT+LKSTT\r\n";ret = pWiFiBtDev->Write(pWiFiBtDev, (unsigned char*)lkstt, strlen(lkstt));if(ESUCCESS != ret) return ret;mdelay(100);unsigned short timeout = 100;while(timeout){unsigned char c = 0;if(pWiFiBtDev->Read(pWiFiBtDev, &c, 1)==1){printf("%c", c);}mdelay(1);timeout--;}return ESUCCESS;
}
由于此指令需要打印”+OK”之后的类容,不容易判定结尾,因而故意设置很长的超时,以便接收到全部数据,再把它打印出来。读者可以改进代码,从中解析出IP。
31.5.8 建立socket连接
W800连上热点之后,要和某个服务器进行网络通信,需要使用指令“AT+SKCT”。这个指令需要传入的参数比较多:协议、本机角色、IP地址、远端端口和本机端口,本书对此指令的参数进行了封装,用一个结构体描述连接信息:
typedef enum{TCP = 0,UDP = 1
}NetworkProtocol;typedef enum{Client = 0,Server = 1
}LocalRole;typedef struct{NetworkProtocol Protocl;LocalRole Role;char *IP;unsigned int RemotePort;unsigned int LocalPort;unsigned int SocketPort;
}ConnectInfo;
应用程序要构造一个ConnectInfo结构体,然后构造AT指令,发送给W800。这就是网络连接函数,如果连接成功,还要记录端口号。代码如下:
int WiFiBtDevConnect(ConnectInfo *info)
{int ret = -EIO;char skct[128];sprintf(skct, "AT+SKCT=%d,%d,%s,%d,%d\r\n", \info->Protocl, \info->Role, \info->IP, \info->RemotePort, \info->LocalPort);ret = pWiFiBtDev->Write(pWiFiBtDev, (unsigned char*)skct, strlen(skct));if(ESUCCESS != ret) return ret;mdelay(100);ret = WiFiBtDevCmdRet("+OK=");if(ESUCCESS != ret) return ret;/* 获取连接成功后的socket号 */unsigned short timeout = 1000;unsigned char i = 0;unsigned char buf[32] = {0};while(timeout){if(strstr((char*)buf, "\r\n")){printf("\r\n");break;}else if(pWiFiBtDev->Read(pWiFiBtDev, &buf[i], 1)==1){printf("%c", buf[i]);i++;}mdelay(1);timeout--;}for(i=0;buf[i]!='\r'; i++){if(buf[i]>='0' && buf[i]<='9'){buf[i] = buf[i] - '0';info->SocketPort = info->SocketPort*10 + buf[i];}}printf("IP:%s - SocketPort:%d\r\n", info->IP, info->SocketPort);return ret;
}
- 第37行:返回的socket号最后一个数字紧跟的是’\r’,在解析socket号的时候不需要这个值,因而for循环的判定就是直到读取到’\r’为止就不进行ASCII到数值的转换计算。
31.5.9 断开指定socket的连接
断开网络连接使用的指令是”AT+SKCLS=<socket>\r\n”,本书封装了如下函数:
int WiFiBtDevDisconnect(ConnectInfo info)
{int ret = -EIO;char skcls[32];sprintf(skcls, "AT+SKCLS=%d\r\n", info.SocketPort);ret = pWiFiBtDev->Write(pWiFiBtDev, (unsigned char*)skcls, strlen(skcls));if(ESUCCESS != ret) return ret;mdelay(100);ret = WiFiBtDevCmdRet("+OK");return ret;
}
31.6 测试程序
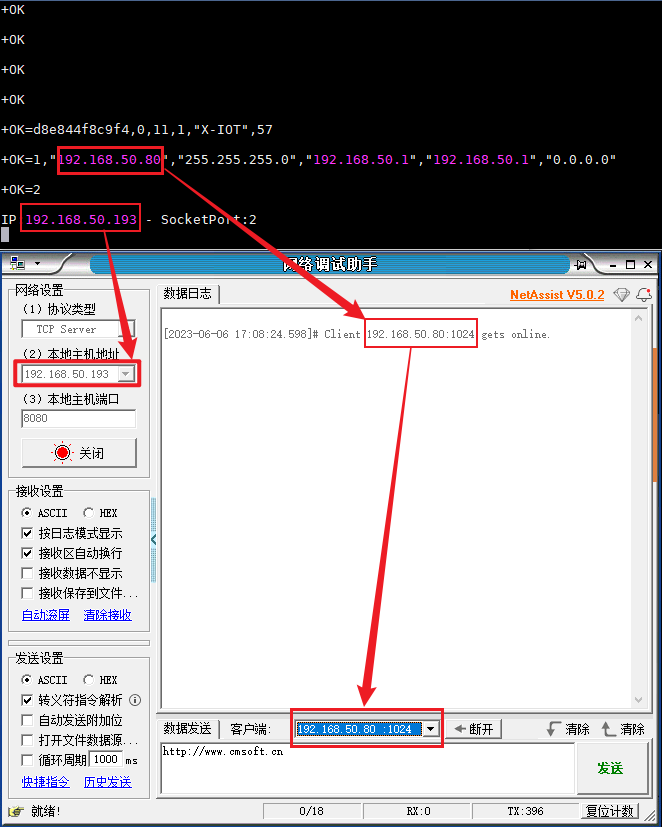
本实验中,先使用网络调试助手开启了Windows电脑的TCP服务,然后启动板子。板子上的程序先使用W800连接热点,然后后Windows电脑建立TCP连接。

测试函数代码如下所示:
void WiFiBtAppTest(void)
{UartDevicesRegister();TimerDevicesRegister();WiFiBtDevInit();WiFiBtDevSetWorkType(STA);WiFiBtDevEnableDHCP();WiFiBtDevConnectWiFi("X-IOT", "x-iot.cq");WiFiBtDevGetLocalIP();ConnectInfo connect = {.Protocl = TCP,.Role = Client,.IP = "192.168.50.193",.RemotePort = 8080,.LocalPort = 1024};int ret = WiFiBtDevConnect(&connect);while(1){if(ret != ESUCCESS){ret = WiFiBtDevConnect(&connect);delay(1);}}
}
31.7 测试结果
打开串口助手观察信息,打开网络助手启动TCP服务。然后将编译出来的二进制文件烧写到板子上运行,就能在串口助手上观察到W800的响应信息,在网络助手上观察到网络连接信息,如下图所示:







)



基于协程的并发编程SDK)



---话题发布)



