
AI助力ADAS仿真测试:康谋HiL测试线上直播研讨会圆满收官!
本次研讨会特邀知名主机厂和智能驾驶公司的仿真测试领域专业技术工程师,聚焦ADAS仿真系统开发与智能驾驶系统测试,并针对测试流程和挑战,深入讲解了康谋自动驾驶仿真模拟解决方案。
感谢关注和参与本次活动的朋友们!大家的积极互动和发言让我们的直播更有活力,也欢迎您继续关注康谋的精彩活动!
目录
一、精彩回顾
1、史工-《数据驱动的只能驾驶测试评估》
2、崔工-《加速ADAS/AD感知和控制开发流程》
3、Szabolcs -《AutoGI功能:扩大HIL仿真测试范围》
4、高工-《ADAS仿真系统开发与测试实践》
二、精选Q&A
1、“数据驱动的智能驾驶测试评估”主题QA
2、“加速ADAS/AD感知和控制开发流程”主题QA
3、“AutoGI功能:扩大HIL仿真测试范围”主题QA
4、“ADAS仿真系统开发与测试实践”主题QA
三、资料分享
一、精彩回顾
1、史工-《数据驱动的只能驾驶测试评估》

在本次研讨会上,史工深入探讨了智能驾驶技术的关键领域。首先,他聚焦于智能驾驶系统测评的挑战,指出了当前面临的复杂性,以及如何处理不断变化的道路环境和行为预测等难题。接着阐述了智能驾驶的数据闭环概念,强调了数据在智能驾驶中的核心作用,提出“数据”既要服务与开发,也要服务于测试。最后讲解了智能驾驶的测试评估,介绍了各种测试场景的设计,以及如何通过科学的测试评估来推动智能驾驶技术的持续改进。
2、崔工-《加速ADAS/AD感知和控制开发流程》
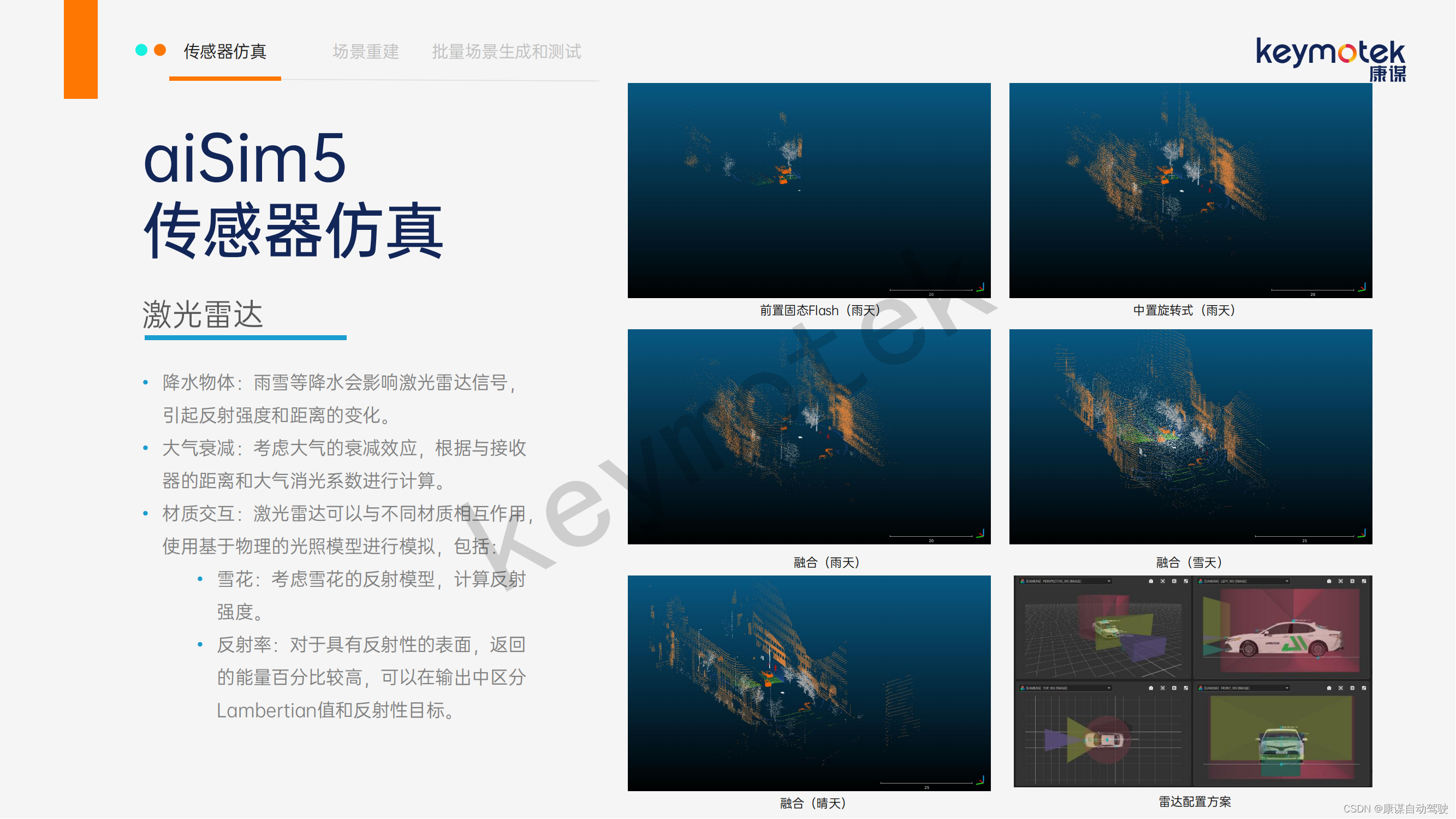
在研讨会上,崔工引领我们探索了开创性ADAS/AD仿真模拟工具——aiSim5。崔工的分享呈现了一个强大的仿真平台——aiSim5,它通过AI创作内容,配备高度优化的传感器模拟和提供确定且可重复的环境模拟支持,打破传统仿真的局限性,为下一代仿真工具的真实性、适应性和行业匹配度设定新的标准。
3、Szabolcs -《AutoGI功能:扩大HIL仿真测试范围》

4、高工-《ADAS仿真系统开发与测试实践》
 高工在研讨会上,针对"ADAS仿真测试及其在量产项目中的实践"这一主题进行了深入讲解。
高工在研讨会上,针对"ADAS仿真测试及其在量产项目中的实践"这一主题进行了深入讲解。
高工的分享深入浅出地探讨了ADAS仿真测试的核心理念、实施策略和实际应用,为我们提供了一套完整的ADAS仿真测试框架,以及在产品开发过程中如何有效利用仿真技术的经验分享。这样的分享对于那些正在或将要在ADAS领域工作的人来说,具有很高的参考价值。
二、精选Q&A
1、“数据驱动的智能驾驶测试评估”主题QA
Q:请问在智能驾驶系统的多级测试评估中,如何有效整合各层级测试结果以确保全面覆盖?
A:在智能驾驶系统的多级测试中,想要全面覆盖各个层级,关键是要有个统一的测试评估框架和数据管理系统。这个框架得能协调好各层级的测试,确保每层的测试结果都能被有效记录、分析和整合。模块级测试就是针对系统里的每个模块,比如感知、规划、控制等,通过专门的测试用例来评估它们的表现。系统级测试则是把这些模块整合起来,看它们作为一个整体时性能如何,稳不稳定。整车级测试则是在真实车辆上进行的,看看系统在真实环境下表现怎么样。还有仿真测试,能模拟各种驾驶场景,评估系统在极端情况下的表现。
Q:针对模块级、系统级、整车级以及SIL/HIL等不同形式测试的测试用例如何分层分级,既保证测试的全面性,又保证测试的针对性?
A:对于不同形式测试的测试用例分层分级,可以采取以下方法:
根据功能复杂度和风险等级对测试用例进行分类,确保每个层级的测试都能覆盖到关键的功能点和风险场景。
利用模块化和可复用的测试模块,提高测试用例的效率和覆盖率。
采用自动化测试工具和持续集成/持续部署(CI/CD)流程,确保测试用例的执行和评估能够快速响应软件的变更。
通过测试用例的优先级排序和选择性执行,确保在有限的资源下最大化测试的效果。
2、“加速ADAS/AD感知和控制开发流程”主题QA
Q:nerf能生成opendrive格式的场景模型,有比较好用的开源工具吗?传感器能针对性的建模吗,比如针对不同厂家激光雷达进行建模,需要厂家提供哪些输入参数?另外,传感器仿真对标怎么做呢?
A:目前方便使用NeRF的开源还是Nerfstudio。在aiSim中无法直接从物理级进行传感器建模,可以通过aiSim提供的物理传感器所提供的实际参数和效应参数尽可能去接近某一款市面在售传感器的效果;如果是不同厂家的传感器模型,可以基于aiSim的Sensor API去进行集成其提供的模型,如果是自己建立物理级的模型,通常需要制造商提供非常高的支持才有可能。仿真对标的话,可以分别在aiSim中和真实世界中分别使用棋盘格进行标定测试;可以在aiSim中重建真实世界的场景,通过生成的合成数据和真实世界数据测试同一算法进行比较。
Q:AEB的仿真测试可以详细说明一下吗?
A:在CCRm场景下举例,选定高速公路上模拟车辆行驶,前方有一辆车以20km/h的速度行驶,Ego与前方车辆碰撞事件设置为4秒。时间越短,意味着Ego和前方车辆碰撞风险越高。这个过程中应该遵循:Ego保持在车道内,避免变换车道(Lane Keep);Ego与其他车辆保持跟车距离(Safety Gap);在畅通道路上,Ego保持目标速度(Speed Change);Ego不会发生和车辆或其他物体碰撞(Collision);最终通过要求为Ego正常到达测试场景的目标终点。aiSim可以在GUI或是独立的场景编辑器中设置这样的场景,通过aiSim提供SimConnector接口(TCP/IP)可以集成ADAS/AD用户的算法(软件),通过aiSim提供的aiFab,可以设置可批量化参数,比如Ego和外部车辆速度,天气状况,车辆类型等,以便于一次性生成大量相关场景,进行覆盖测试。
3、“AutoGI功能:扩大HIL仿真测试范围”主题QA
Q:用于自动驾驶模拟场景建模的三维重建技术成熟度如何?
A:aiSim5是世界上第一个支持这种新渲染技术的仿真工具,虽然在场景重建区域的大小和天气变化上确实还存在一定的局限,但确实具有了一定产品成熟度。
Q:NeRF 和高斯溅射在实际测试中表现如何?是否有实际客户在使用它们?
A:aiSim5的这一新功能在今年1月份发布,目前已经有3家位于德国和日本的OEM在使用此功能,目前在被测系统的角度来看,这个功能已经很优秀了,但是我们也会提供基准数据,过几周将会由康谋发布aiSim5在NeRF和3DGS场景下一些相关性分析报告。
4、“ADAS仿真系统开发与测试实践”主题QA
Q:可否理解logsim就是基于仿真平台进行数据回放,其目的就是通过场景回放进行问题分析?
A:logsim其实就是一个基于仿真平台的数据回放工具,它的作用就是让我们能够通过重现以前的驾驶场景来分析问题,找出可能的缺陷或者进行性能评估。就像是我们可以时光倒流回到之前的某个场景,然后仔细观察和分析,帮助我们更好地理解系统的行为和表现。
Q:怎样看待针对仿真系统做自我置信度评价,来明确仿真测试的测试范围?
A:关于仿真系统的自我置信度评价,我认为这是一个非常重要的环节。通过对自己的仿真测试进行评价,我们可以明确测试的范围和深度,知道我们的测试能够覆盖到哪些方面,还有哪些方面可能需要进一步的加强。这就像是给我们的仿真测试做了一个全面的体检,帮助我们更好地理解测试的强项和弱点,从而更有针对性地进行改进和优化。
三、资料分享
如果您错过了本次研讨会也无需担心,可以点击链接查看精彩回放,相关资料也可以获取。
康谋HiL测试线上研讨会 - ADAS仿真测试 | HiL测试 | 智能驾驶测试评估 | 基于生成式AI的测试场景搭建康谋AI助力ADAS仿真测试线上研讨会将于【3月27日下午14:00】开始,邀请多名仿真领域资深技术专家、国内知名OEM测试工程师等讲师,为您讲解智能驾驶测试、自动驾驶数据闭环、ADAS仿真系统开发实践、基于生成式AI的场景搭建、ADAS感知和控制开发等相关精彩内容,诚邀您的参与。![]() https://keymotek.com/workshop-adas-simulation/
https://keymotek.com/workshop-adas-simulation/
感谢您对本次活动的关注和支持!
期待与您下次交流!


)





![练习 13 Web [极客大挑战 2019]Secret File](http://pic.xiahunao.cn/练习 13 Web [极客大挑战 2019]Secret File)


)







