yolov8直接调用zed相机实现三维测距(python)
- 1. 相关配置
- 2. 相关代码
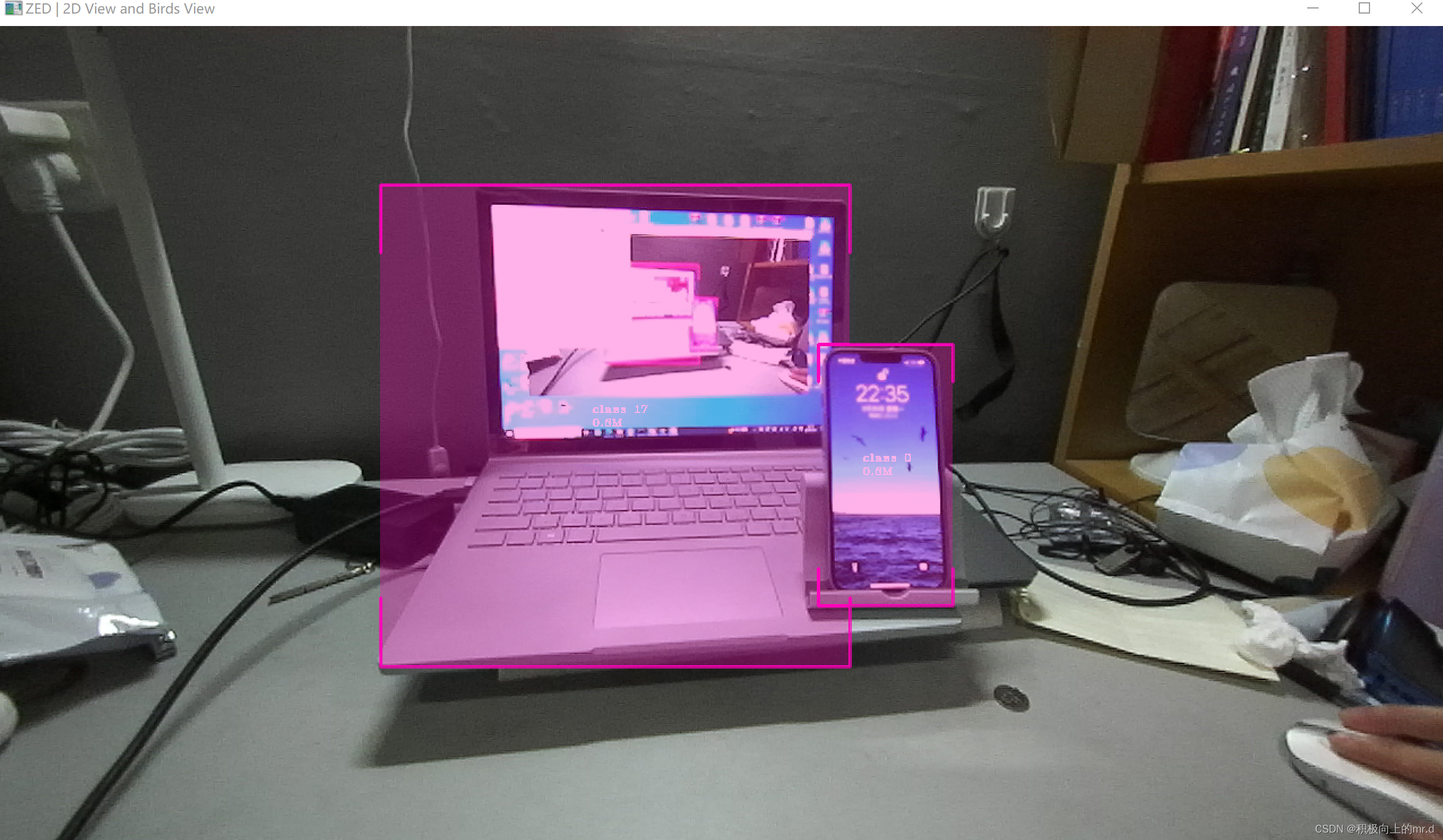
- 3. 实验结果
相关链接
此项目直接调用zed相机实现三维测距,无需标定,相关内容如下:
1.yolov5直接调用zed相机实现三维测距(python)
2. yolov4直接调用zed相机实现三维测距
3. Windows+YOLOV8环境配置
4.具体实现效果已在哔哩哔哩发布,点击此链接跳转
本篇博文工程源码下载(麻烦github给个星星)
下载链接:https://github.com/up-up-up-up/zed-yolov8
附:Zed调用YOLOv7测距也已经实现,但是3060笔记本6G显存带不动,在大现存服务器上可以运行,可能是由于YOLOv7网络结构导致的,由于不具备普适性,就不再写相关文章了,有需要的可以仿照这个代码去改写
1. 相关配置
python==3.7
Windows-pycharm
zed api 具体配置见 (zed api 配置步骤)
由于我电脑之前python版本为3.7,yolov8要求python最低为3.8,所以本次实验直接在虚拟环境里进行,未配置gpu,可能看着卡卡的,有需要的可以配置一下,原理是一样的
2. 相关代码
主代码 zed-yolo.py,具体放置在yolov8主目录下
#!/usr/bin/env python3import sys
import numpy as npimport argparse
import torch
import cv2
import pyzed.sl as sl
from ultralytics import YOLOfrom threading import Lock, Thread
from time import sleepimport ogl_viewer.viewer as gl
import cv_viewer.tracking_viewer as cv_viewerlock = Lock()
run_signal = False
exit_signal = Falsedef xywh2abcd(xywh, im_shape):output = np.zeros((4, 2))# Center / Width / Height -> BBox corners coordinatesx_min = (xywh[0] - 0.5*xywh[2]) #* im_shape[1]x_max = (xywh[0] + 0.5*xywh[2]) #* im_shape[1]y_min = (xywh[1] - 0.5*xywh[3]) #* im_shape[0]y_max = (xywh[1] + 0.5*xywh[3]) #* im_shape[0]# A ------ B# | Object |# D ------ Coutput[0][0] = x_minoutput[0][1] = y_minoutput[1][0] = x_maxoutput[1][1] = y_minoutput[2][0] = x_maxoutput[2][1] = y_maxoutput[3][0] = x_minoutput[3][1] = y_maxreturn outputdef detections_to_custom_box(detections, im0):output = []for i, det in enumerate(detections):xywh = det.xywh[0]# Creating ingestable objects for the ZED SDKobj = sl.CustomBoxObjectData()obj.bounding_box_2d = xywh2abcd(xywh, im0.shape)obj.label = det.clsobj.probability = det.confobj.is_grounded = Falseoutput.append(obj)return outputdef torch_thread(weights, img_size, conf_thres=0.2, iou_thres=0.45):global image_net, exit_signal, run_signal, detectionsprint("Intializing Network...")model = YOLO(weights)while not exit_signal:if run_signal:lock.acquire()img = cv2.cvtColor(image_net, cv2.COLOR_BGRA2RGB)# https://docs.ultralytics.com/modes/predict/#video-suffixesdet = model.predict(img, save=False, imgsz=img_size, conf=conf_thres, iou=iou_thres)[0].cpu().numpy().boxes# ZED CustomBox format (with inverse letterboxing tf applied)detections = detections_to_custom_box(det, image_net)lock.release()run_signal = Falsesleep(0.01)def main():global image_net, exit_signal, run_signal, detectionscapture_thread = Thread(target=torch_thread, kwargs={'weights': opt.weights, 'img_size': opt.img_size, "conf_thres": opt.conf_thres})capture_thread.start()print("Initializing Camera...")zed = sl.Camera()input_type = sl.InputType()if opt.svo is not None:input_type.set_from_svo_file(opt.svo)# Create a InitParameters object and set configuration parametersinit_params = sl.InitParameters(input_t=input_type, svo_real_time_mode=True)init_params.coordinate_units = sl.UNIT.METERinit_params.depth_mode = sl.DEPTH_MODE.ULTRA # QUALITYinit_params.coordinate_system = sl.COORDINATE_SYSTEM.RIGHT_HANDED_Y_UPinit_params.depth_maximum_distance = 50runtime_params = sl.RuntimeParameters()status = zed.open(init_params)if status != sl.ERROR_CODE.SUCCESS:print(repr(status))exit()image_left_tmp = sl.Mat()print("Initialized Camera")positional_tracking_parameters = sl.PositionalTrackingParameters()# If the camera is static, uncomment the following line to have better performances and boxes sticked to the ground.# positional_tracking_parameters.set_as_static = Truezed.enable_positional_tracking(positional_tracking_parameters)obj_param = sl.ObjectDetectionParameters()
# obj_param.detection_model = sl.OBJECT_DETECTION_MODEL.CUSTOM_BOX_OBJECTSobj_param.enable_tracking = Truezed.enable_object_detection(obj_param)objects = sl.Objects()obj_runtime_param = sl.ObjectDetectionRuntimeParameters()# Displaycamera_infos = zed.get_camera_information()camera_res = camera_infos.camera_resolution# Create OpenGL viewerviewer = gl.GLViewer()point_cloud_res = sl.Resolution(min(camera_res.width, 720), min(camera_res.height, 404))point_cloud_render = sl.Mat()viewer.init(camera_infos.camera_model, point_cloud_res, obj_param.enable_tracking)point_cloud = sl.Mat(point_cloud_res.width, point_cloud_res.height, sl.MAT_TYPE.F32_C4, sl.MEM.CPU)image_left = sl.Mat()# Utilities for 2D displaydisplay_resolution = sl.Resolution(min(camera_res.width, 1280), min(camera_res.height, 720))image_scale = [display_resolution.width / camera_res.width, display_resolution.height / camera_res.height]image_left_ocv = np.full((display_resolution.height, display_resolution.width, 4), [245, 239, 239, 255], np.uint8)# # Utilities for tracks view# camera_config = camera_infos.camera_configuration# tracks_resolution = sl.Resolution(400, display_resolution.height)# track_view_generator = cv_viewer.TrackingViewer(tracks_resolution, camera_config.fps, init_params.depth_maximum_distance)# track_view_generator.set_camera_calibration(camera_config.calibration_parameters)# image_track_ocv = np.zeros((tracks_resolution.height, tracks_resolution.width, 4), np.uint8)# Camera posecam_w_pose = sl.Pose()while viewer.is_available() and not exit_signal:if zed.grab(runtime_params) == sl.ERROR_CODE.SUCCESS:# -- Get the imagelock.acquire()zed.retrieve_image(image_left_tmp, sl.VIEW.LEFT)image_net = image_left_tmp.get_data()lock.release()run_signal = True# -- Detection running on the other threadwhile run_signal:sleep(0.001)# Wait for detectionslock.acquire()# -- Ingest detectionszed.ingest_custom_box_objects(detections)lock.release()zed.retrieve_objects(objects, obj_runtime_param)# -- Display# Retrieve display datazed.retrieve_measure(point_cloud, sl.MEASURE.XYZRGBA, sl.MEM.CPU, point_cloud_res)point_cloud.copy_to(point_cloud_render)zed.retrieve_image(image_left, sl.VIEW.LEFT, sl.MEM.CPU, display_resolution)zed.get_position(cam_w_pose, sl.REFERENCE_FRAME.WORLD)# 3D renderingviewer.updateData(point_cloud_render, objects)# 2D renderingnp.copyto(image_left_ocv, image_left.get_data())cv_viewer.render_2D(image_left_ocv, image_scale, objects, obj_param.enable_tracking)global_image = image_left_ocv# global_image = cv2.hconcat([image_left_ocv, image_track_ocv])# # Tracking view# track_view_generator.generate_view(objects, cam_w_pose, image_track_ocv, objects.is_tracked)cv2.imshow("ZED | 2D View and Birds View", global_image)key = cv2.waitKey(10)if key == 27:exit_signal = Trueelse:exit_signal = Trueviewer.exit()exit_signal = Truezed.close()if __name__ == '__main__':parser = argparse.ArgumentParser()parser.add_argument('--weights', type=str, default='yolov8n.pt', help='model.pt path(s)')parser.add_argument('--svo', type=str, default=None, help='optional svo file')parser.add_argument('--img_size', type=int, default=416, help='inference size (pixels)')parser.add_argument('--conf_thres', type=float, default=0.4, help='object confidence threshold')opt = parser.parse_args()with torch.no_grad():main()3. 实验结果
测距图(感觉挺精准的)
视频展示:
Zed相机+YOLOv8目标检测跟踪





:单例模式)
)





- TIM定时器的输出捕获原理)





Qt+OpenCV调用海康工业相机SDK抓拍示例)
