图的最短路径问题是一个经典的计算机科学和运筹学问题,旨在找到图中两个顶点之间的最短路径。这种问题在多种场景中都有应用,如网络路由、地图导航等。
解决图的最短路径问题有多种算法,其中最著名的包括:
1.迪杰斯特拉算法
(1). 图的要求
适用于权重非负的图。
(2). 实现
该算法的实现通常包括以下步骤:
a. 初始化:将源节点标记为最短路径已经知道.设置其路径距离为0.将其入队列.
b. 循环迭代,直到队列为空
b.1. 出队列,得p.
b.2.迭代&更新.
即对从p可达,且最短路径尚未确定节点q.
比较,若p的路径距离+Edge<p,q>小于q的路径距离,则更新q的路径距离=p的路径距离+Edge<p,q>.设置p为其路径上一节点.
b.3.从最短路径尚未确定节点中选出路径值最小节点t.将t的最短路径标记为已经知道.t入队列.在无法选出这样的t时,表示剩余节点均不可达.可提前结束迭代.
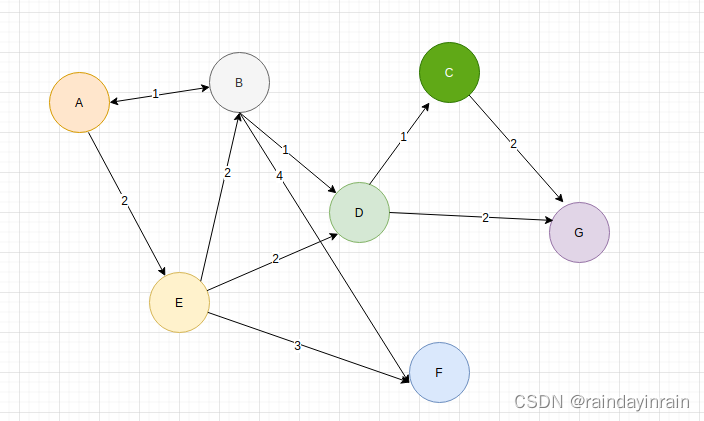
(3). 实例
(4). 算法实现
#define MAX 0x7fffffff
class NodeInfo{
public:char m_nName;int32_t m_nPath = MAX;int32_t m_nPreIndex = -1;int32_t m_nTag = -1;
};template<class T>
class Node{
public:T m_nEle;
};template<class EdgeInfo>
class Edge{
public:int32_t m_nWeight = MAX;bool m_bValid = false;
};Node<NodeInfo> stNodes[7];
Edge<int> stEdges[7][7];
void Sort(void* lpBegin, void *lpEnd);
int main(){stNodes[0].m_nEle.m_nName = 'A';stNodes[1].m_nEle.m_nName = 'B';stNodes[2].m_nEle.m_nName = 'C';stNodes[3].m_nEle.m_nName = 'D';stNodes[4].m_nEle.m_nName = 'E';stNodes[5].m_nEle.m_nName = 'F';stNodes[6].m_nEle.m_nName = 'G';stEdges[0][1].m_nWeight = 1;stEdges[0][1].m_bValid = true;stEdges[1][0].m_bValid = true;stEdges[1][0].m_nWeight = 1;stEdges[0][4].m_bValid = true;stEdges[0][4].m_nWeight = 2;stEdges[4][1].m_bValid = true;stEdges[4][1].m_nWeight = 2;stEdges[1][3].m_bValid = true;stEdges[1][3].m_nWeight = 1;stEdges[1][5].m_bValid = true;stEdges[1][5].m_nWeight = 4;stEdges[4][3].m_bValid = true;stEdges[4][3].m_nWeight = 2;stEdges[3][2].m_bValid = true;stEdges[3][2].m_nWeight = 1;stEdges[3][6].m_bValid = true;stEdges[3][6].m_nWeight = 2;stEdges[2][6].m_bValid = true;stEdges[2][6].m_nWeight = 2;int nSourceIndex = 0;stNodes[nSourceIndex].m_nEle.m_nTag = 1;stNodes[nSourceIndex].m_nEle.m_nPath = 0;stNodes[nSourceIndex].m_nEle.m_nPreIndex = -1;int32_t nArrQueue[7];int32_t nFirst = 0;int32_t nEnd = 0;int32_t nNum = 0;nArrQueue[0] = nSourceIndex;nFirst = 0;nEnd = 1;nNum = 1;while(nNum > 0){// 出队列int32_t nIndex;if(nNum = 1){nIndex = nArrQueue[nFirst];nFirst = 0;nEnd = 0;nNum = 0;}else{nIndex = nArrQueue[nFirst];nFirst = (nFirst+1)%7;nNum--;}// 迭代&更新for(int32_t i = 0; i < 7; i++){if(stEdges[nIndex][i].m_bValid && stNodes[i].m_nEle.m_nTag == -1){if(stNodes[i].m_nEle.m_nPath > stNodes[nIndex].m_nEle.m_nPath + stEdges[nIndex][i].m_nWeight){stNodes[i].m_nEle.m_nPath = stNodes[nIndex].m_nEle.m_nPath + stEdges[nIndex][i].m_nWeight;stNodes[i].m_nEle.m_nPreIndex = nIndex;}}}// 入队列// 选择未访问节点中最短距离最小的一个nIndex = -1;int32_t nMin = MAX;for(int32_t i = 0; i < 7; i++){if(stNodes[i].m_nEle.m_nTag == -1 && stNodes[i].m_nEle.m_nPath < nMin){nMin = stNodes[i].m_nEle.m_nPath;nIndex = i;}}if(nIndex == -1){break;// 所有节点均已被访问.或剩余节点全部不可达.}// 选举的节点就是最短路径已知的stNodes[nIndex].m_nEle.m_nTag = 1;if(nNum == 0){nArrQueue[0] = nIndex;nFirst = 0;nEnd = 1;nNum++;}else{nArrQueue[nEnd] = nIndex;nEnd = (nEnd+1)%7;nNum++;}}// testprintf("finish\n");while(true){int32_t nIndex = -1;scanf("%d", &nIndex);getchar();printf("path_%d\n", stNodes[nIndex].m_nEle.m_nPath);printf("%c ", stNodes[nIndex].m_nEle.m_nName);while(nIndex != -1){printf("%c ", stNodes[stNodes[nIndex].m_nEle.m_nPreIndex].m_nEle.m_nName);nIndex = stNodes[nIndex].m_nEle.m_nPreIndex;}printf("\n");}return 0;
}
2.贝尔曼-福特算法(Bellman-Ford Algorithm):
(1). 图的要求
可以处理带有负权重的图,但无法处理包含负权重环的图。
针对权重为负的图,可以让所有边权中加上一个基础量转变为权重非负的,再通过迪杰斯特拉求解.所以,正常没必要用这个.
时间复杂度为O(|V|*|E|)。
(2). 算法
贝尔曼-福特算法(Bellman-Ford Algorithm)的实现过程可以分为以下三个阶段:
a. 初始化阶段:
创建一个数组Distant,用于记录从源点s到图中各个顶点的最短路径长度估计值。通常,将源点s到自己的距离Distant[s]初始化为0,而将源点s到其他所有顶点的距离初始化为一个较大的值(如无穷大),表示这些顶点与源点之间的最短路径尚未确定。
b. 松弛操作阶段:
这个阶段需要进行|V|-1次迭代,其中V是图中顶点的数量。在每一次迭代中,遍历图中的所有边(u, v),并检查是否可以通过这条边来更新从源点s到顶点v的最短路径长度估计值。
具体来说,对于每一条边(u, v),如果Distant[u] + w(u, v) < Distant[v],则更新Distant[v]为Distant[u] + w(u, v)。这里,w(u, v)是边(u, v)的权重,表示从顶点u到顶点v的距离或成本。
通过不断的松弛操作,Distant数组中的值会逐渐逼近从源点到各个顶点的实际最短路径长度。
c. 负权回路检测阶段:
在完成|V|-1次松弛操作后,再进行一次额外的松弛操作。这次操作的目的是为了检测图中是否存在负权回路(即从某个顶点出发,经过一系列边后回到该顶点,且整个回路的总权重为负)。
如果在额外的松弛操作中,仍然有Distant数组的值被更新,那么就说明图中存在负权回路。因为负权回路的存在会导致最短路径问题无解,因为可以通过不断绕行负权回路来减小路径长度。
如果额外的松弛操作没有更新Distant数组的值,那么算法结束,Distant数组中存储的就是从源点到各个顶点的最短路径长度。




机制介绍)


)
)



国内比较好的实施厂家)




![[HackMyVM]靶场 Submissions](http://pic.xiahunao.cn/[HackMyVM]靶场 Submissions)
)
