就是脑残死磕,你们如果有更好的方法一定要留言啊~~独乐乐不如众乐乐。
做推箱子的时候需要考虑脸是不是面对着箱子,不是必须90度,可以有一个-45~45度的范围。
摸索了一下,有几种做法和几个小白坑,这里列出来。
一、准备工作(实现跨蓝图修改变量)
-
准备一个名为
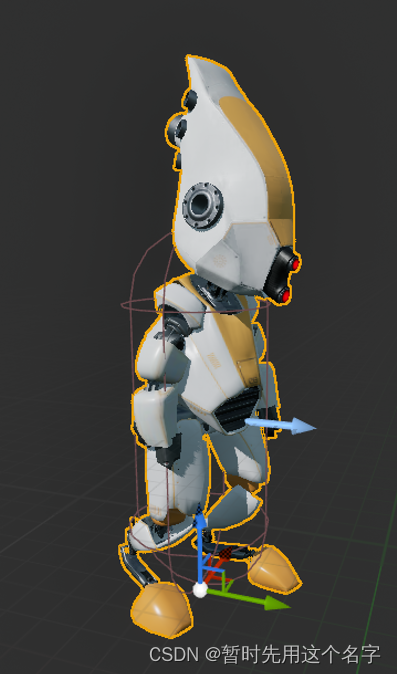
LightRobot的玩家蓝图(pawn)
就用正常的配置操作即可,我这里写明LightRobot是为了方便与截图中的名称一一对应。
-
准备一个名为
BP_Box的角色蓝图(actor),其中放入Cube立方体组件和Box盒体碰撞组件。
Box的四周比Cube大一点,底顶比Cube小一点。
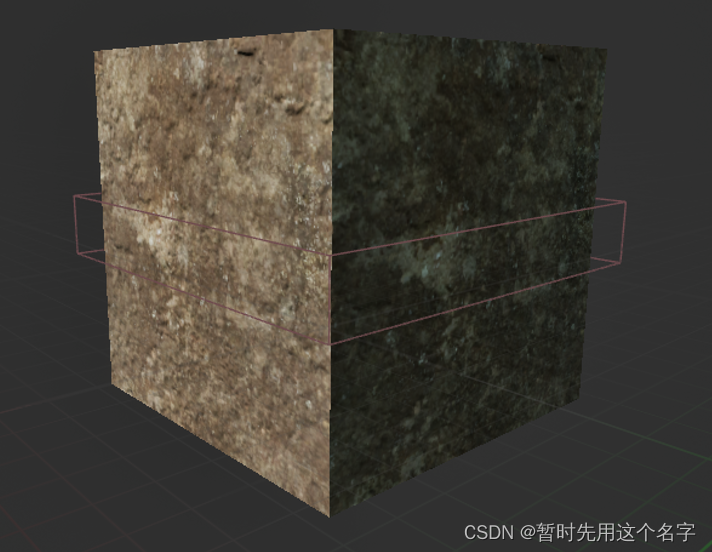
注意: 需要将
Box作为Cube的子级,否则Cube移动后,Box并不会跟随移动,下次想要推就没法激活了。
同理:DefaultSceneRoot不会随着Cube移动,因为它是根,是Cube的父级,而父级不会跟随子级移动。
这点很重要哦,搞错的话将无法获取正确的位置。

-
准备一个动画蓝图
LightRobot_ABP,其中放入一个变量isPush来确定是否激活推动动画
动画部分不在本文展开。

-
使用重叠事件来更改
LightRobot_ABP中isPush的值
这个流程人物只要走到箱子附近就会释放推动动画,哪怕人物是背对着箱子的。

两个知识点和流程
知识点:
- 跨蓝图修改需要用
Castto...节点,翻译为类型转换为~~(明明是施法-_-!); - 要读取动画蓝图则需要先获取
动画实例。
流程:
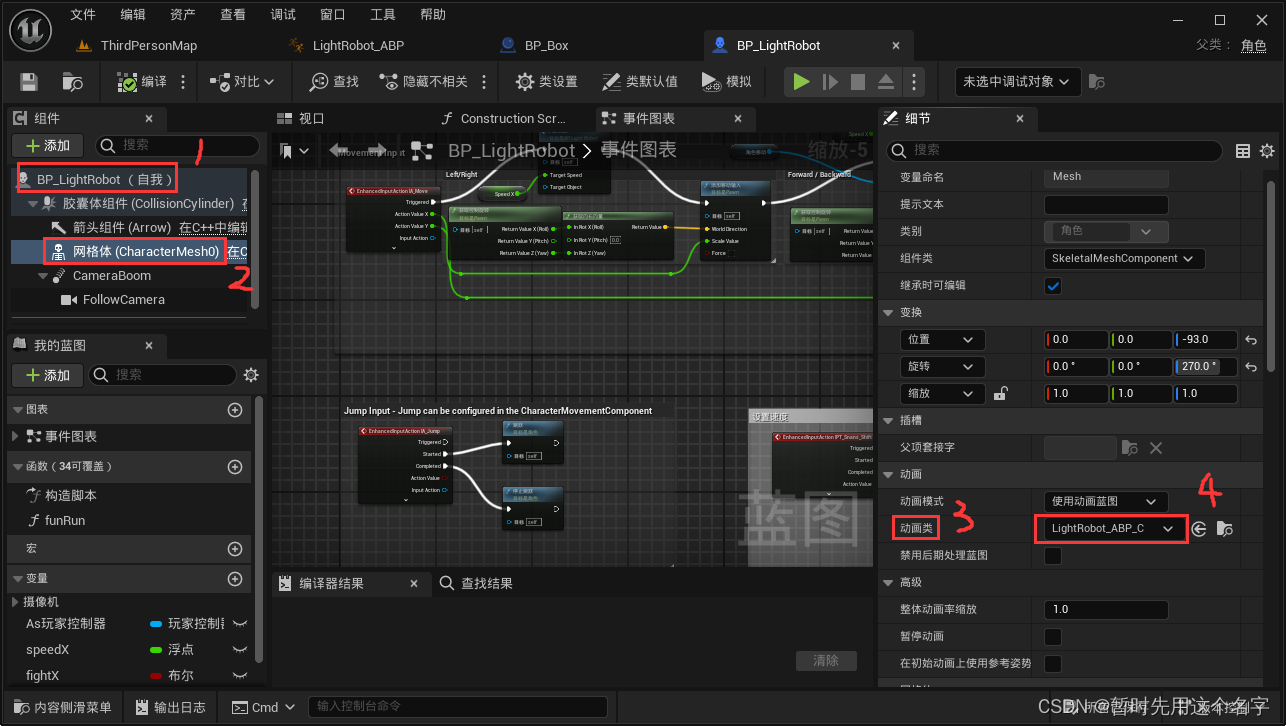
(1) 重叠事件发生,于是从一堆Other Actor碰撞到的物体中Cast to BP_LightRobot找到玩家蓝图;
(2) 再Get Mesh找到该玩家蓝图下的网格体;
(3) 这个网格体下有动画,于是Get Anim Instance获取动画实例;
(4) 在用Cast To LightRobot_ABP 从一堆动画中找到玩家用的动画蓝图;
(5) 最后Set isPush设置变量。
下面的图片是从玩家蓝图中找到动画蓝图的顺序,看完是不是就清楚上面的流程了?
这些准备好后,现在开始正式判断角度。
一、根据位置判断
基本原理:
- 获得箱子的位置和玩家的位置,计算得到一个人到箱子的向量A;
- 获得玩家脸朝向的向量,其实就是前进的向量B;
- 计算得出A和B之间的夹角
不过这种方法并不精准哦,毕竟站在箱子边缘和站在箱子中间,本身就会产生角度,当然如果箱子不那么大,也够用了。
1. 通过Cube的相对位置来实现
我之前说过,在BP_Box蓝图中,Cube是能动的,可根self是不会移动的,需要通过Get Relactive Location来获得Cube相对DefaultSceneRoot的位置。
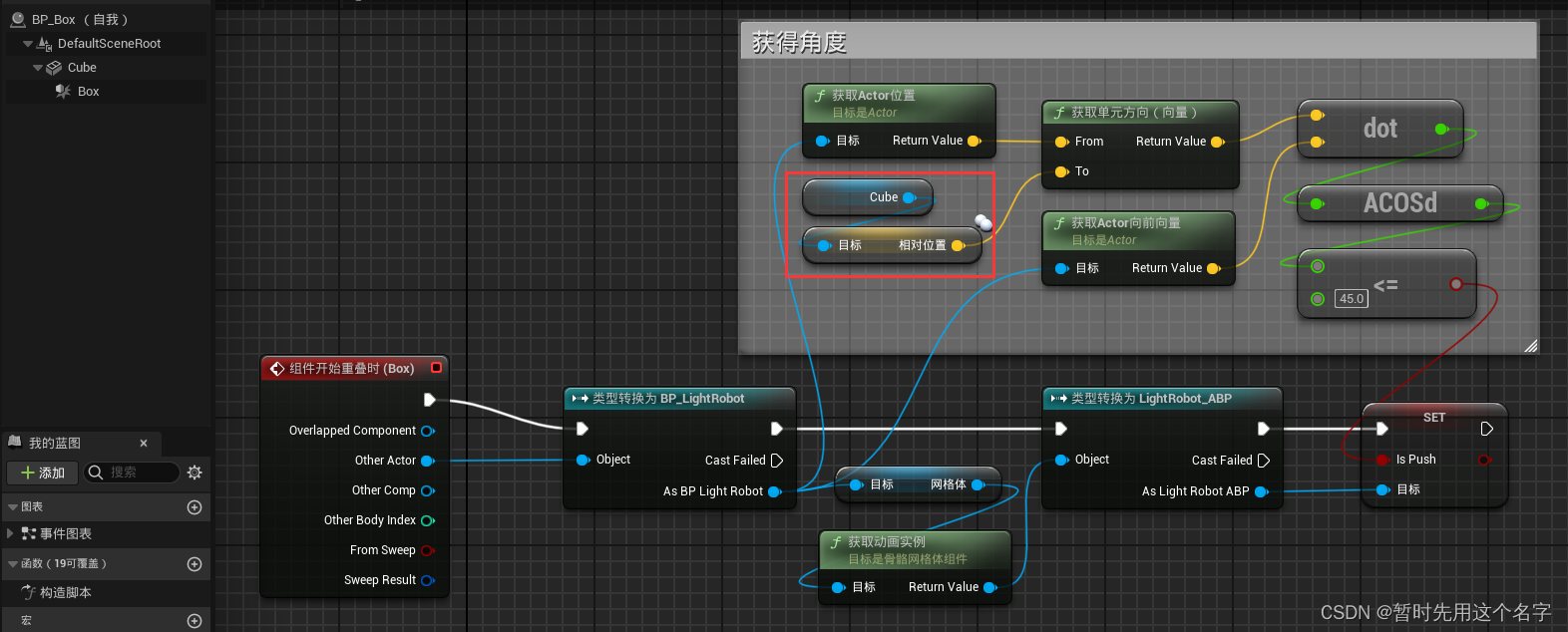
这里的点积Dot Product和反余弦Acos(Dgrees)只要知道是比较两个向量后再换算成角度
2. 将Cube设置为根级来实现
这里直接调用Cube的位置,但是必须要将Cube作为根替换掉原来的DefaultSceneRoot,道理是一样的,因为根DefaultSceneRoot不会跟随子级Cube移动,那么当第一次重叠时能获得正确的角度,而第二次重叠时虽然箱子已经移动过位置了,但箱子的根位置还在原来的地方,于是就出错了。

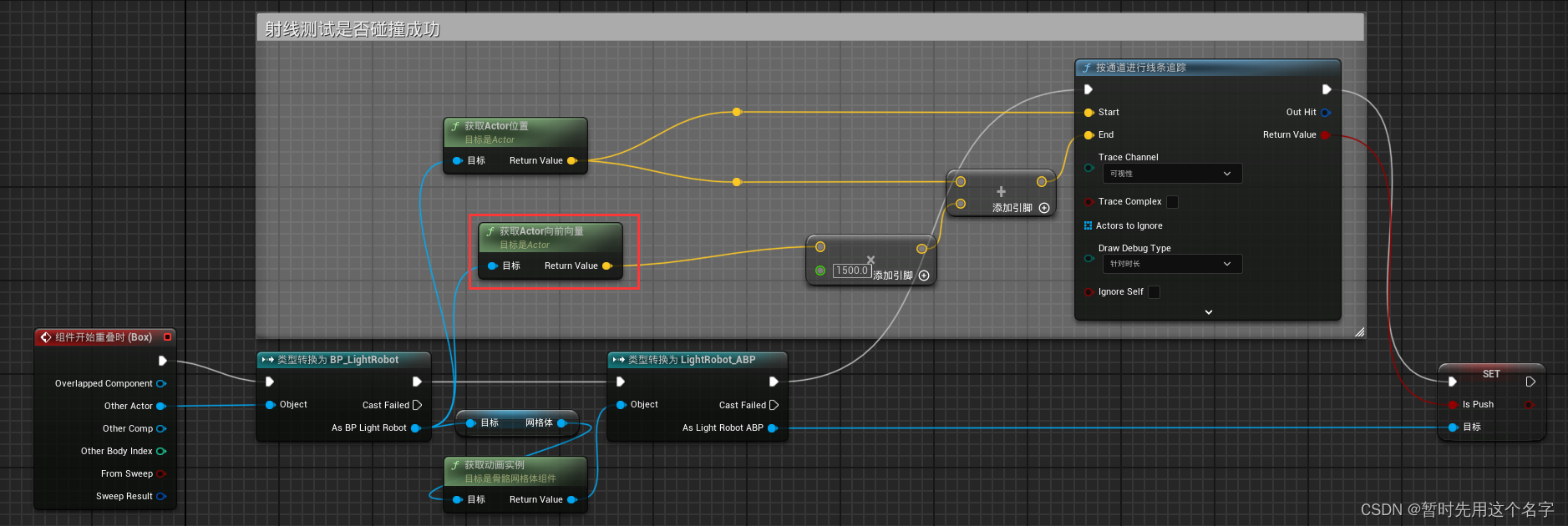
二、根据射线判断
上面的方法是根据角色到物体的方向和角色前进方向来算出两个方向的夹角是否满足面对物体的要求。
但这个方法在遇到小物体是没问题,但遇到一个很大的物体时,就会出错了——当你站在物体边缘,这时候两个方向的角度已经很大了,就更不用提脸的朝向了。
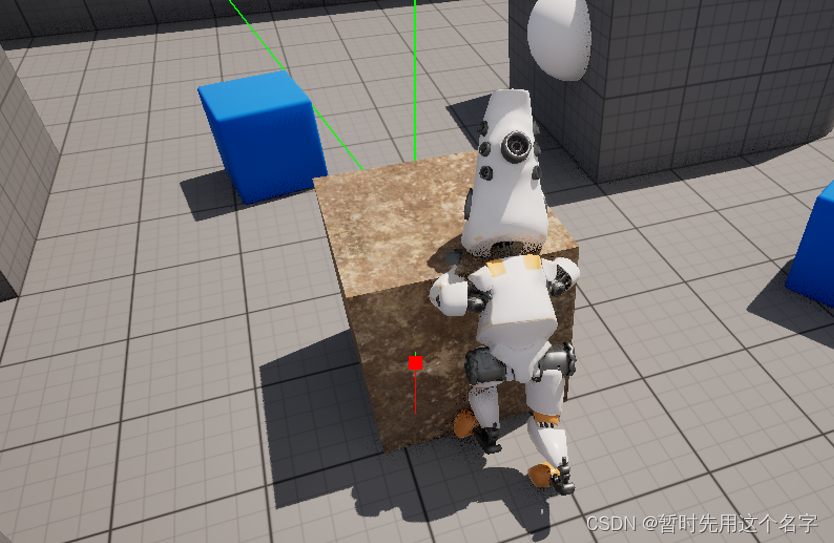
然后就找到了真正的解决办法~~,应该也是真正常用的办法:“胸口射线法”,学会了这个方法基本可以解决90%以上的碰撞问题了;
简单来说就是:
- 当组件重叠事件激活时,从玩家胸口射出一根有指定方向和距离的射线;
- 当这个射线击中某个可以碰撞的物体时检测是否符合要求,符合则为真;
- 本例中因为触发盒体碰撞的范围离箱子很近,那么射线的第一个遇到的目标肯定是盒体,所以就为真了;
- 本例中的射线长度为1500,目的是为了测试时能看清射线,实际运行时是有问题的,因为你斜着箱子站的时候,射线虽然没有击中箱子,但可能击中更远的墙了,那么也会判定命中为真,所以射线长度设个50、100短一点的就行了。
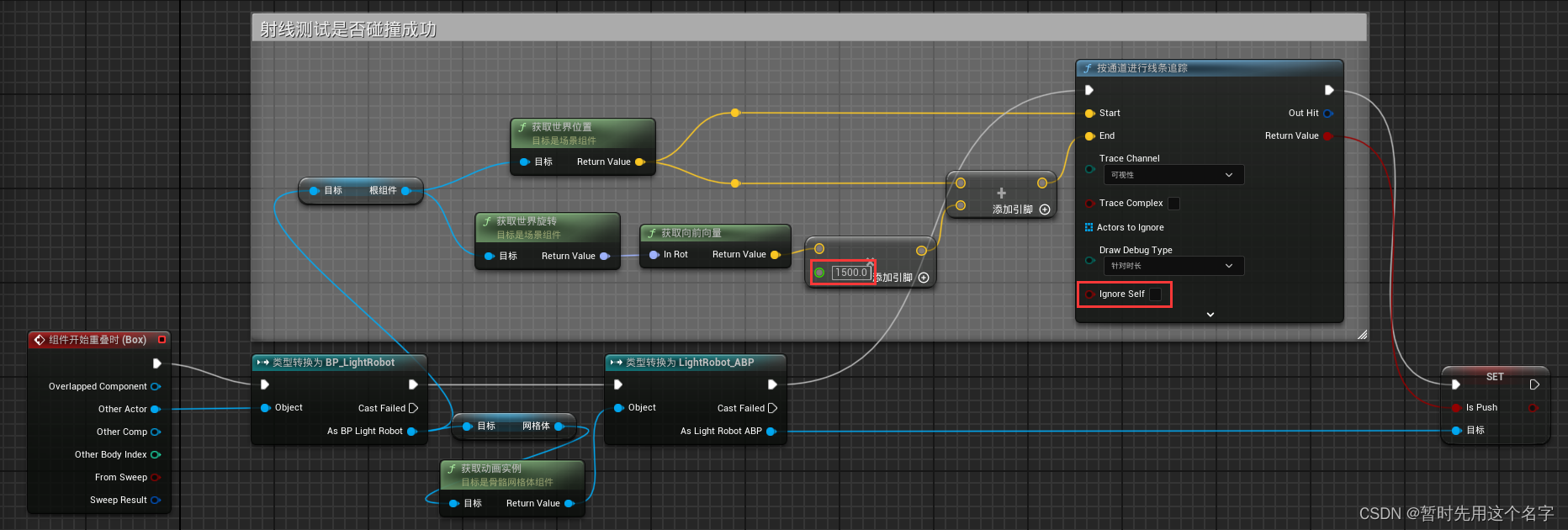
- 注意
Ignore Self需要去掉勾,因为打勾意味着忽略触发射线的Actor,也就是说射线投射将不会与触发该投射的Actor产生碰撞。
由于我们是重叠时才会激活这个射线,重叠的前提就是玩家与箱子共同参与这个触发,如果此刻Ignore Self为真的话,那么射线就会忽略掉箱子,直接穿到后面去了。
网上很多案例的情况与本文不同,他们并不涉及重叠事件,因此Ignore Self为真是没问题的,这点需要注意。
主要是理解LineTraceByChannel按通道进行线条追踪的用法:
- 其
start开始值为玩家的当前位置(向量); - 其
End结束值为玩家面对的方向多n个距离的位置(向量);
1. 根据世界坐标射出射线
2.根据角色坐标射出射线
在本例中用这个方法也没问题,反正就是胸口射出射线么,用这个还不需要查询根组件,效率更高一点。
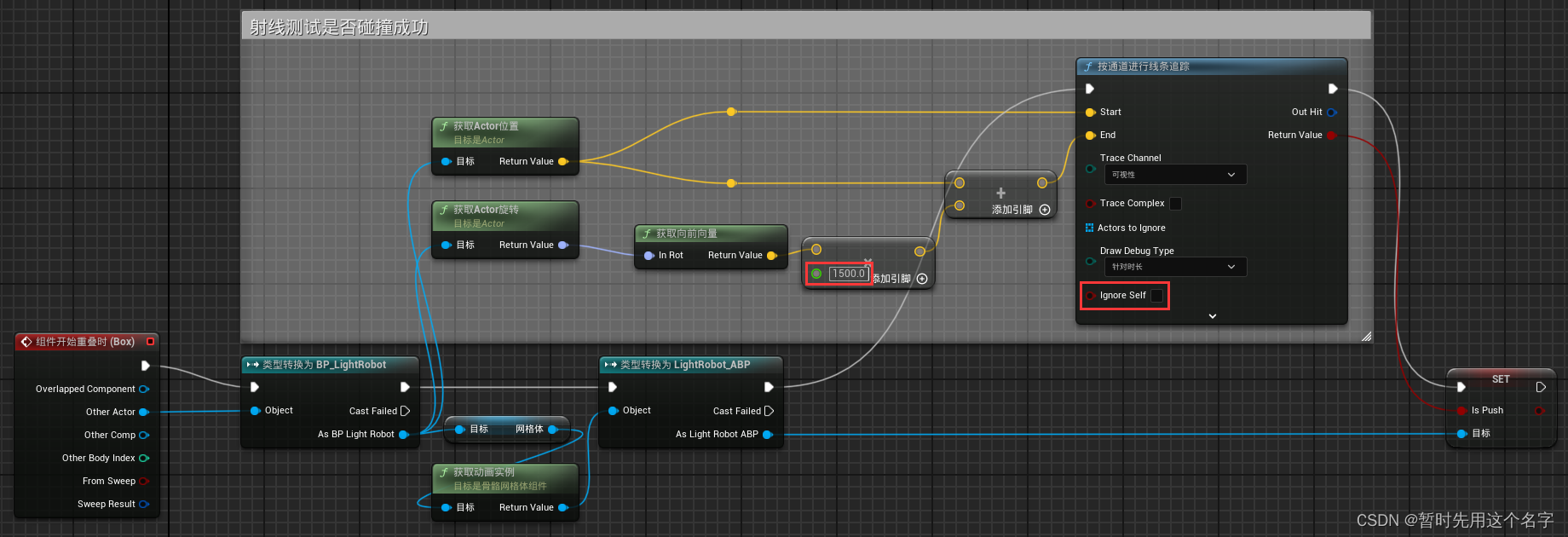
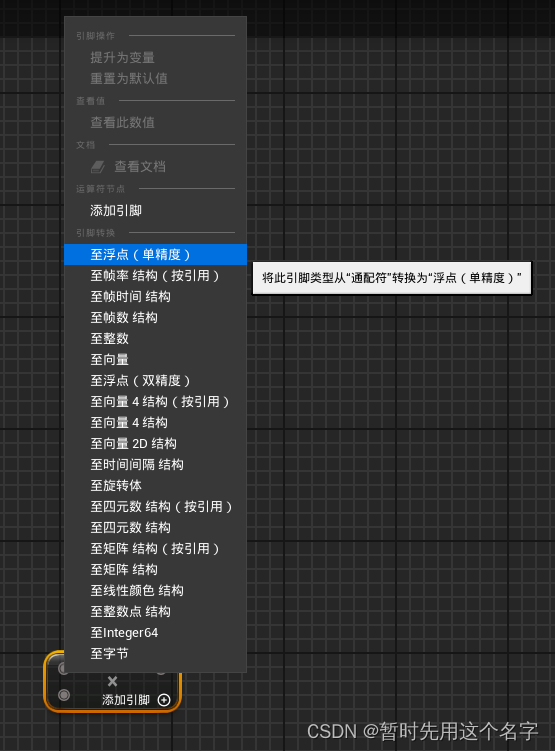
也可以把其中向前的向量直接简写为如下
小知识:
乘法默认情况下两个乘数的单位是相同的,但是你可以选中其中一个数右键菜单更改其单位。
参考:
Using a Single Line Trace (Raycast) by Channel
虚幻引擎图文笔记:如何实现角色推箱子(使用Line Trace By Channel实现)
虚幻引擎图文笔记:如何实现角色推箱子(使用碰撞实现的初级版)
















|二叉树的递归遍历、二叉树的迭代遍历、二叉树的统一迭代法)

)
)