1.1 协议描述
1.1.1 总体通信结构
MODBUS TCP/IP 的通信系统可以包括不同类型的设备:
(1)连接至 TCP/IP 网络的 MODBUS TCP/IP 客户机和服务器设备;
(2)互连设备,例如:在 TCP/IP 网络和串行链路子网之间互连的网桥、路由器或网关,联接,该子网允许将 MODBUS 串行链路客户机和服务器终端设备连接起来。
MODBUS 通信需要建立客户机与服务器之间的 TCP 连接。
连接的建立可以由用户应用模块直接实现,也可以由 TCP 连接管理模块自动完成。
2. 使用方法
以下是睿尔曼机械臂采用Modbus -tcp的使用方法:
➩modbus TCP_slave地址对应表相关文件,如有需要请@睿尔曼技术支持
准备工作:ModScan32应用程序、一根网线、一台电脑
-
步骤一:点击进入ModScan32应用程序。
- 步骤二:选择modbus tcp 协议
进行连接前需将本地电脑通过网线与机械臂相连
本地电脑ip:192.168.1.xx,机械臂默认ip:192.168.1.18;
“Connect Using”选择Remote modbus TCP Server;“IP Address”为192.168.1.18;“Service Port”为502;点击“OK”进行连接;

- 步骤三:连接成功界面
连接成功后将会看到数据展示区有数据在不断刷新,同时“地址功能码设置区”中的Valid slave responses和Number of poll的值也会保持不断刷新。

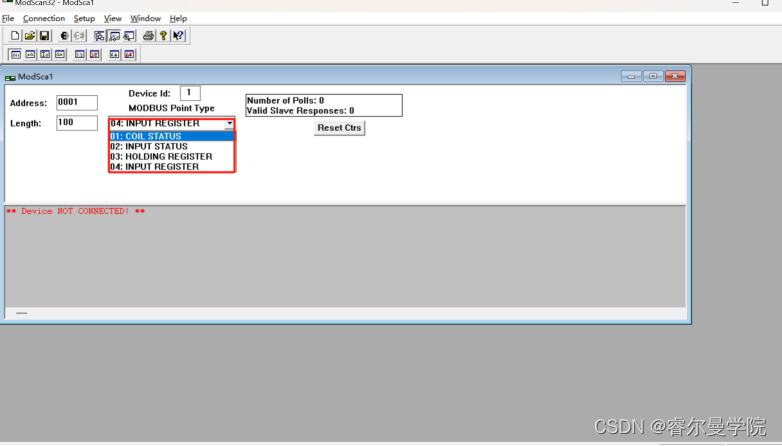
- 步骤四:可以在下列选项切换不同的寄存器。
MODBUS Point Type下有4个寄存器,分别是:
01 线圈寄存器;02离散输入;03保持寄存器;04输入寄存器
示例一 打开控制器VOUT输出电压
首先选择03:HOLDING REGISTER即保持寄存器,找到地址40001,双击打开可看到其Address值为1,对应着寄存器中的40001;然后根据modbusTCP_slave地址对应表介绍,更改value的值,然后点击Update开始对VOUT(对外输出电压)进行设置。

示例二 指定编号运行编程程序
首先选择03:HOLDING REGISTER即保持寄存器,找到地址40002,双击打开可看到其Address值为2,对应着寄存器中的40002;

根据睿尔曼公司提供的modbus TCP_slave地址对应表介绍,更改Value的值点击Update运行其代表的程序(如下图)

如若成功发送则会看到机械臂按照所指定的程序工作。




指针才是我们的该有的姿态~)

)












