文章目录
- 一、向量和矩阵的基本运算
- 1、简单变换
- 1. 平移变换
- 2. 缩放变换
- 3. 旋转变换
- 4. 一般线性变换
- 2、齐次坐标
- 0. 齐次坐标表示
- 1. 2D点的齐次坐标变换
- 2. 投影空间 ( x , y , w ) (x, y, w) (x,y,w)
- 3. 2D直线的齐次坐标表示
- a. 直线的参数方程表示
- b. 直线的法向量和原点距离表示
- 4. 叉积算子
- 5. 平行线可以相交
一、向量和矩阵的基本运算
1、简单变换
x = [ x y ] \boldsymbol{x} =\begin{bmatrix}x\\y\end{bmatrix} x=[xy]
1. 平移变换
[ x ′ y ′ ] = [ x y ] + [ a b ] \begin{bmatrix}x'\\y'\end{bmatrix} = \begin{bmatrix}x\\y\end{bmatrix} + \begin{bmatrix}a\\b\end{bmatrix} [x′y′]=[xy]+[ab]
将向量 [ a b ] \begin{bmatrix}a\\b\end{bmatrix} [ab]加到 [ x y ] \begin{bmatrix}x\\y\end{bmatrix} [xy]上,得到平移后的新向量 [ x ′ y ′ ] = [ x + a y + b ] \begin{bmatrix}x'\\y'\end{bmatrix} = \begin{bmatrix}x+a\\y+b\end{bmatrix} [x′y′]=[x+ay+b]。其中 a a a和 b b b分别为x方向和y方向的平移量。
2. 缩放变换
[ x ′ y ′ ] = [ s x 0 0 s y ] [ x y ] = [ s x x s y y ] \begin{bmatrix}x'\\y'\end{bmatrix} = \begin{bmatrix}s_x & 0\\0 & s_y\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix} = \begin{bmatrix}s_xx\\s_yy\end{bmatrix} [x′y′]=[sx00sy][xy]=[sxxsyy]
通过缩放矩阵 [ s x 0 0 s y ] \begin{bmatrix}s_x & 0\\0 & s_y\end{bmatrix} [sx00sy]乘以 [ x y ] \begin{bmatrix}x\\y\end{bmatrix} [xy],可以得到缩放后的向量 [ x ′ y ′ ] = [ s x x s y y ] \begin{bmatrix}x'\\y'\end{bmatrix} = \begin{bmatrix}s_xx\\s_yy\end{bmatrix} [x′y′]=[sxxsyy]。其中 s x s_x sx和 s y s_y sy分别为x方向和y方向的缩放比例。
3. 旋转变换
[ x ′ y ′ ] = [ cos θ − sin θ sin θ cos θ ] [ x y ] \begin{bmatrix}x'\\y'\end{bmatrix} = \begin{bmatrix}\cos\theta & -\sin\theta\\\sin\theta & \cos\theta\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix} [x′y′]=[cosθsinθ−sinθcosθ][xy]
通过旋转矩阵 [ cos θ − sin θ sin θ cos θ ] \begin{bmatrix}\cos\theta & -\sin\theta\\\sin\theta & \cos\theta\end{bmatrix} [cosθsinθ−sinθcosθ]乘以 [ x y ] \begin{bmatrix}x\\y\end{bmatrix} [xy],可以得到绕原点逆时针旋转 θ \theta θ角度后的向量 [ x ′ y ′ ] \begin{bmatrix}x'\\y'\end{bmatrix} [x′y′]。
4. 一般线性变换
[ x ′ y ′ ] = [ a b c d ] [ x y ] = [ a x + b y c x + d y ] \begin{bmatrix}x'\\y'\end{bmatrix} = \begin{bmatrix}a & b\\c & d\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix} = \begin{bmatrix}ax+by\\cx+dy\end{bmatrix} [x′y′]=[acbd][xy]=[ax+bycx+dy]
通过一个2x2变换矩阵 [ a b c d ] \begin{bmatrix}a & b\\c & d\end{bmatrix} [acbd]乘以 [ x y ] \begin{bmatrix}x\\y\end{bmatrix} [xy],可以得到一个新的变换后向量 [ x ′ y ′ ] = [ a x + b y c x + d y ] \begin{bmatrix}x'\\y'\end{bmatrix} = \begin{bmatrix}ax+by\\cx+dy\end{bmatrix} [x′y′]=[ax+bycx+dy],这个变换矩阵可以表示缩放、旋转、错切等线性变换的组合。
2、齐次坐标
0. 齐次坐标表示
在使用齐次坐标表示时,我们将n维欧几里得空间中的点 ( x 1 , x 2 , … , x n ) (x_1, x_2, \dots, x_n) (x1,x2,…,xn)表示为 ( n + 1 ) (n+1) (n+1)维的齐次坐标形式 ( x 1 , x 2 , … , x n , 1 ) (x_1, x_2, \dots, x_n, 1) (x1,x2,…,xn,1),在原始坐标的基础上添加一个1作为最后一个分量。
- 将2D点用齐次坐标 [ x y 1 ] \begin{bmatrix}x\\y\\1\end{bmatrix} ⎣⎡xy1⎦⎤表示,即在笛卡尔坐标 [ x y ] \begin{bmatrix}x\\y\end{bmatrix} [xy]的基础上添加一个1作为最后一个分量;
- 将3D点用齐次坐标 [ x y z 1 ] \begin{bmatrix}x\\y\\z\\1\end{bmatrix} ⎣⎢⎢⎡xyz1⎦⎥⎥⎤表示,即在笛卡尔坐标 [ x y z ] \begin{bmatrix}x\\y\\z\end{bmatrix} ⎣⎡xyz⎦⎤的基础上添加一个1作为最后一个分量。
1. 2D点的齐次坐标变换
-
变换矩阵:
[ a b c d e f 0 0 1 ] \begin{bmatrix}a & b & c\\d & e & f\\0 & 0 & 1\end{bmatrix} ⎣⎡ad0be0cf1⎦⎤ -
变换结果
[ x ′ y ′ 1 ] = [ a b c d e f 0 0 1 ] [ x y 1 ] = [ a x + b y + c d x + e y + f 1 ] \begin{bmatrix}x'\\y'\\1\end{bmatrix} = \begin{bmatrix}a & b & c\\d & e & f\\0 & 0 & 1\end{bmatrix}\begin{bmatrix}x\\y\\1\end{bmatrix}=\begin{bmatrix}ax+by+c\\dx+ey+f\\1\end{bmatrix} ⎣⎡x′y′1⎦⎤=⎣⎡ad0be0cf1⎦⎤⎣⎡xy1⎦⎤=⎣⎡ax+by+cdx+ey+f1⎦⎤
该变换矩阵包含了三个部分:
- 平移分量 [ c f ] \begin{bmatrix}c\\f\end{bmatrix} [cf]
- 旋转分量( [ a b d e ] \begin{bmatrix}a & b\\d & e\end{bmatrix} [adbe]构成的2x2子矩阵)
- 缩放分量(a, b, d, e的大小)
- 当这些元素的值大于1时,会放大相应方向的坐标;小于1时,会缩小。
2. 投影空间 ( x , y , w ) (x, y, w) (x,y,w)
引入一个三维投影空间,由 x x x、 y y y和 w w w三个坐标构成,用 [ x y w ] \begin{bmatrix}x\\y\\w\end{bmatrix} ⎣⎡xyw⎦⎤表示。
其中 w = 0 w=0 w=0表示无穷远的点,即所有投影线的汇聚点所在位置。
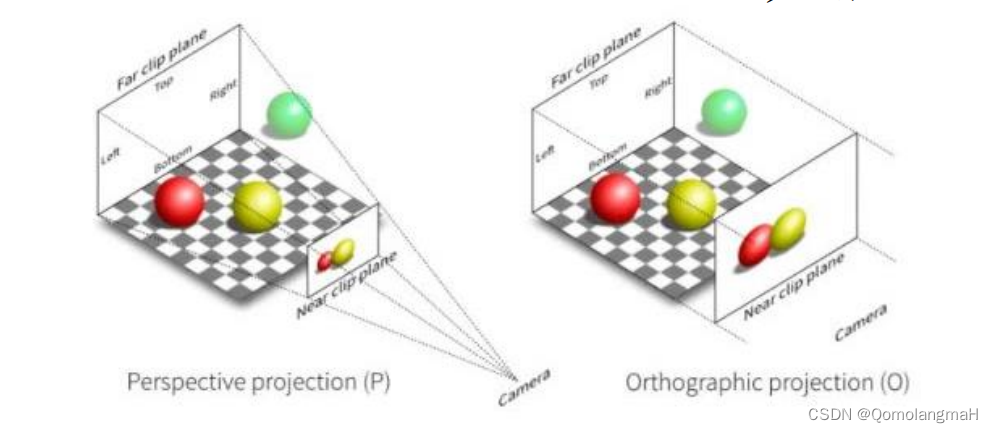
- 左图展示了透视投影(Perspective projection)的情况,所有投影线从场景中的点汇聚于一个无穷远点,这种投影方式可以提供深度信息和真实的景深感。
- 透视投影可以提供更真实的视觉效果,表达式为:
[ x ′ y ′ w ′ ] = [ a b c d e f g h i ] [ x y w ] \begin{bmatrix}x'\\y'\\w'\end{bmatrix} = \begin{bmatrix}a&b&c\\d&e&f\\g&h&i\end{bmatrix}\begin{bmatrix}x\\y\\w\end{bmatrix} ⎣⎡x′y′w′⎦⎤=⎣⎡adgbehcfi⎦⎤⎣⎡xyw⎦⎤
- 右图展示了正交投影(Orthographic projection)的情况,投影线都是平行的,没有汇聚点,无法获得真实的景深感,但可以保持投影后物体的形状不变形。
- 正交投影常用于工程制图等需要保持形状的场合,表达式为:
[ x ′ y ′ w ′ ] = [ a b 0 c d 0 0 0 1 ] [ x y w ] \begin{bmatrix}x'\\y'\\w'\end{bmatrix} = \begin{bmatrix}a&b&0\\c&d&0\\0&0&1\end{bmatrix}\begin{bmatrix}x\\y\\w\end{bmatrix} ⎣⎡x′y′w′⎦⎤=⎣⎡ac0bd0001⎦⎤⎣⎡xyw⎦⎤
- 正交投影常用于工程制图等需要保持形状的场合,表达式为:
这种投影空间和投影变换在计算机图形学中被广泛使用,用于将三维物体投影到二维平面上进行显示。
3. 2D直线的齐次坐标表示
a. 直线的参数方程表示
l = ( a , b , c ) x ⋅ l = a x + b y + c = 0 l = (a, b, c)\\x\cdot l = ax + by + c = 0 l=(a,b,c)x⋅l=ax+by+c=0其中 ( a , b , c ) (a, b, c) (a,b,c)是直线的系数,任意一点 ( x , y ) (x, y) (x,y)代入方程,结果为0,则该点位于该直线上。
b. 直线的法向量和原点距离表示
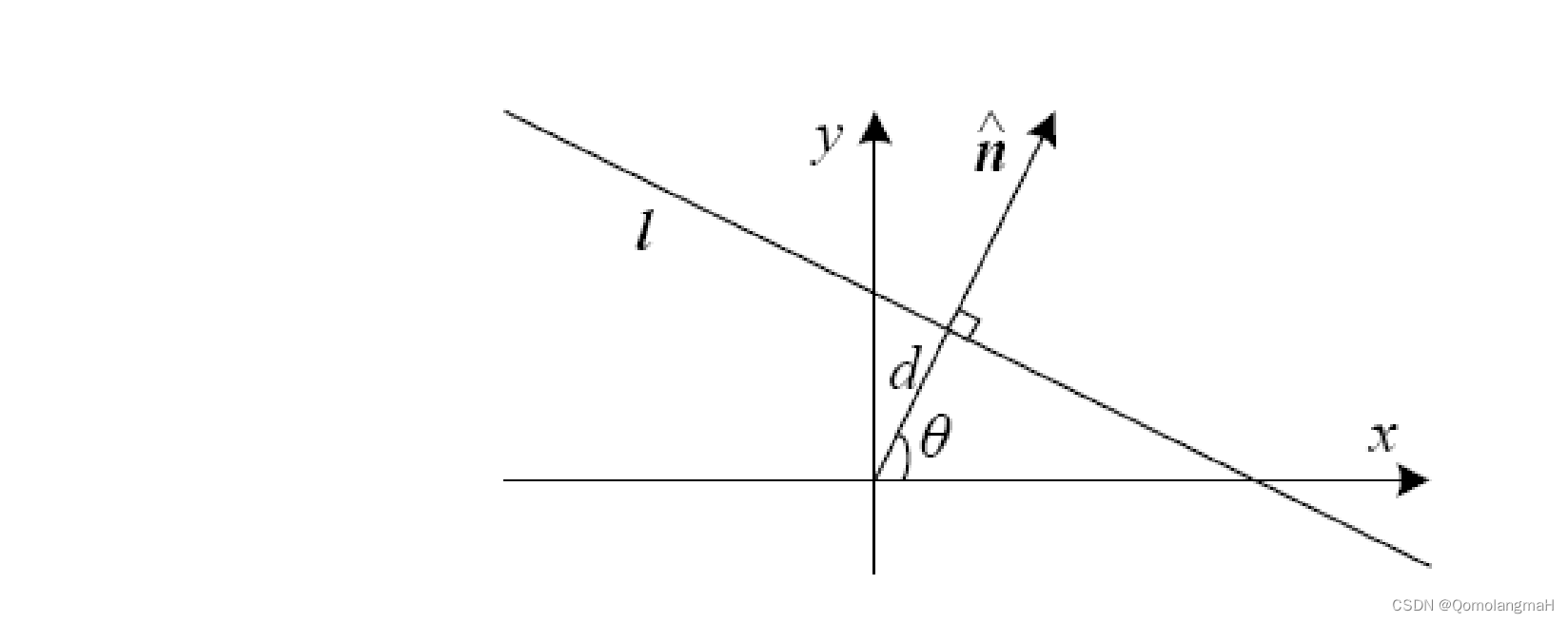
l = ( n x , n y , d ) = ( n ⃗ , d ) with ∥ n ⃗ ∥ = 1 l = (n_x, n_y, d) = (\vec{n}, d) \quad \text{with} \ \|\vec{n}\| = 1 l=(nx,ny,d)=(n,d)with ∥n∥=1其中 n ⃗ = ( n x , n y ) = ( cos θ , sin θ ) \vec{n} = (n_x, n_y) = (\cos\theta, \sin\theta) n=(nx,ny)=(cosθ,sinθ)表示直线的法向量,即垂直于直线方向的单位向量, d d d表示直线到原点的有符号距离。
这种表示直观地描述了直线的性质:
- n ⃗ \vec{n} n给出了直线的方向
- d d d给出了直线到原点的距离,取正负号表示直线在原点的两侧
法向量和原点距离表示对于直线的各种几何运算都很有用,例如求直线交点、判断点和直线的位置关系等。通过矩阵变换,可以很自然地对直线进行旋转、平移等操作。
4. 叉积算子
- 两条直线的表示:
给定两条直线 l ~ 1 \tilde{l}_1 l~1和 l ~ 2 \tilde{l}_2 l~2的齐次坐标表示。 - 交点的计算:
两条直线 l ~ 1 \tilde{l}_1 l~1和 l ~ 2 \tilde{l}_2 l~2的交点 x ~ \tilde{x} x~可以通过它们的外积(叉积)求得:
x ~ = l ~ 1 × l ~ 2 \tilde{x} = \tilde{l}_1 \times \tilde{l}_2 x~=l~1×l~2
其中,外积的计算方式为:
l ~ 1 = ( x ~ 1 , y ~ 1 , a ~ 1 ) \tilde{l}_1 = (\tilde{x}_1, \tilde{y}_1, \tilde{a}_1) l~1=(x~1,y~1,a~1) l ~ 2 = ( x ~ 2 , y ~ 2 , a ~ 2 ) \tilde{l}_2 = (\tilde{x}_2, \tilde{y}_2, \tilde{a}_2) l~2=(x~2,y~2,a~2) x ~ = l ~ 1 × l ~ 2 = \tilde{x} = \tilde{l}_1 \times \tilde{l}_2 = x~=l~1×l~2=
这种利用直线的齐次坐标表示求交点的方法,可以自然地推广到三维空间,求两条三维直线或平面的交点。同理,在三维情况下,交点坐标为两个直线或平面的齐次坐标外积。
5. 平行线可以相交
- 两条直线在非齐次坐标系下的方程组表示:
{ A x + B y + C = 0 A x + B y + D = 0 \begin{cases} Ax + By + C = 0\\ Ax + By + D = 0 \end{cases} {Ax+By+C=0Ax+By+D=0 - 将这两条直线方程转换为齐次坐标表示:
{ A x w + B y w + C = 0 A x w + B y w + D = 0 ⟺ { A x + B y + C w = 0 A x + B y + D w = 0 \begin{cases} A \dfrac{x}{w} + B \dfrac{y}{w} + C = 0\\ A \dfrac{x}{w} + B \dfrac{y}{w} + D = 0 \end{cases} \quad\iff\quad \begin{cases} Ax + By + Cw = 0\\ Ax + By + Dw = 0 \end{cases} ⎩⎨⎧Awx+Bwy+C=0Awx+Bwy+D=0⟺{Ax+By+Cw=0Ax+By+Dw=0
在这种表示下,两条直线的齐次坐标分别为 ( A , B , C ) (A, B, C) (A,B,C)和 ( A , B , D ) (A, B, D) (A,B,D)。
- 通过分析可以发现,当 w = 0 w=0 w=0时,对应的是无穷远点,两条直线在这个点处相交



)



)



![[嵌入式系统-39]:龙芯1B 开发学习套件 -9-PMON的文件结构](http://pic.xiahunao.cn/[嵌入式系统-39]:龙芯1B 开发学习套件 -9-PMON的文件结构)
模型和TCP/IP模型)
—— 政安晨:嵌入式系统基本素养【后摩尔时代】)
之find_package)




