什么是单片机?
单片机( Single-Chip Microcomputer )是一种集成电路芯片,把具有数据处理能力的中央处理器 CPU 、随机存储器 RAM 、只读存储器 ROM 、多种 I/O 口和中断系统、定时器 / 计数器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、 A/D 转换器等电路)集成到一块硅片上构成的一个小而完善的微型计算机系统,在工业控制领域广泛应用。
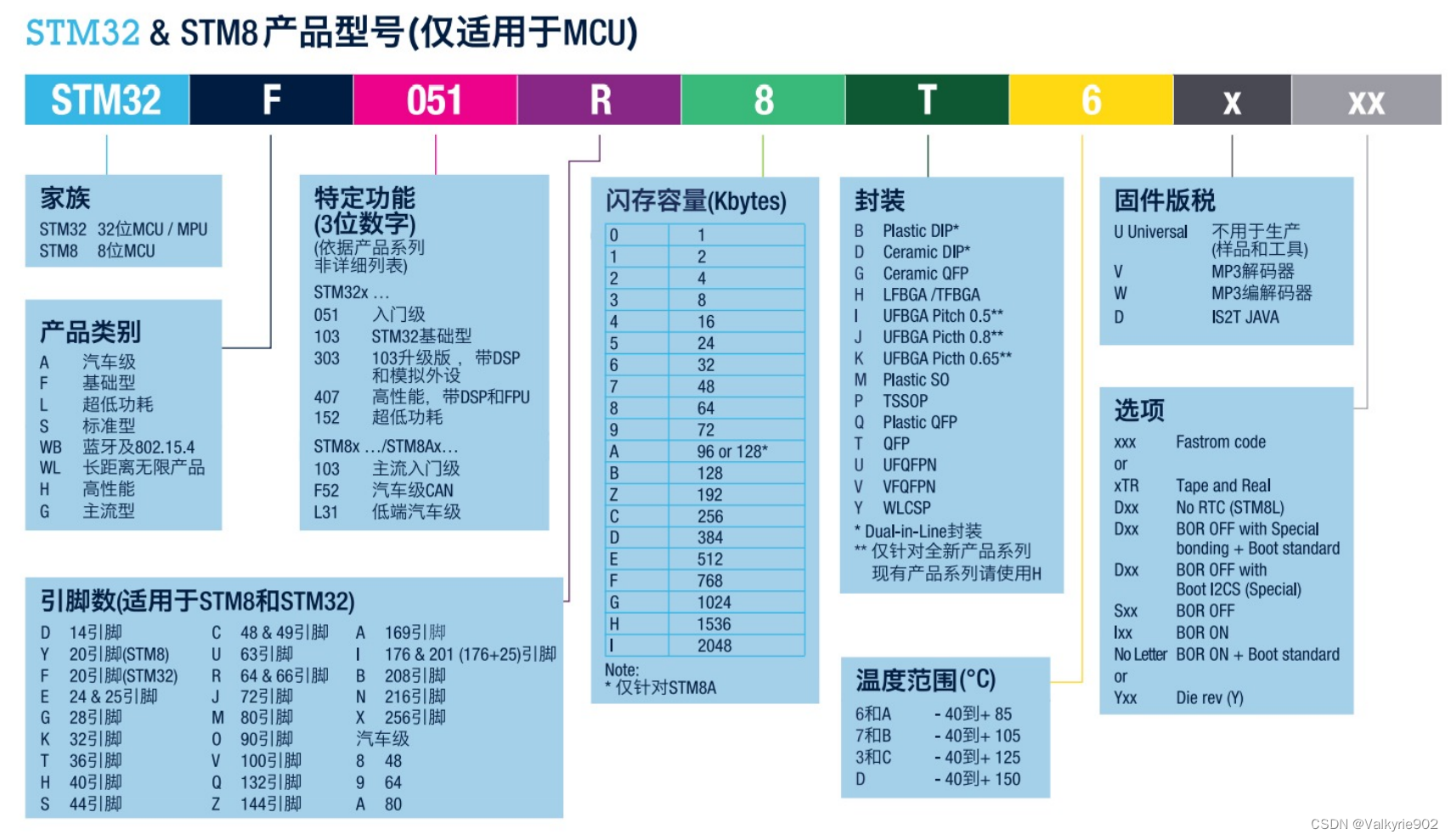
STM系列单片机命名规则
STM32F103C8T6单片机简介
| 项目 | 介绍 |
| 内核 | Cortex-M3 |
| Flash | 64K x 8bit |
| SRAM | 20K x 8bit |
| GPIO | 37 个 GPIO ,分别为 PA0-PA15 、 PBO-PB15 、 PC13-PC15 、 PDO-PD1 |
| ADC | 2 个 12bit ADC 合计 12 路通道,外部通道 : PAO 到 PA7+PBO 到 PB1 内部通道 : 温度传感器通道ADC Channel 16 和内部参考电压通道 ADC Channel 17 |
| 定时器/ 计数器 | 4 个 16bit 定时器 / 计数器,分别为 TIM1 、 TIM2 、 TIM3 、 TIM4TM1 带死区插入,常用于产生PWM 控制电机 |
| 看门狗定时器 | 2 个看门狗定时器 ( 独立看门狗 IWDG 、窗口看门狗 WWDG) |
| 滴答定时器 | 1 个 24bit 向下计数的滴答定时器 systick |
| 工作电压、温度 | 2V3.6V 、 -40°C85°C |
| 通信串口 | 2 * IIC , 2 * SPI , 3 * USART , 1 * CAN |
| 系统时钟 | 内部 8MHz 时钟 HSI 最高可倍频到 64MHZ ,外部 8MHZ 时钟 HSE 最高可倍频到72MHZ |
标准库与HAL库区别
- 寄存器众多,需要经常翻阅芯片手册,费时费力;
- 更大灵活性,可以随心所欲达到自己的目的;
- 深入理解单片机的运行原理,知其然更知其所以然。
- 将寄存器底层操作都封装起来,提供一整套接口(API)供开发者调用每款芯片都编写了一份库文件,也就是工程文件里stm32F1xx…之类的;
- 配置结构体变量成员就可以修改外设的配置寄存器,从而选择不同的功能;
- 大大降低单片机开发难度,但是在不同芯片间不方便移植。
- ST公司目前主力推的开发方式,新的芯片已经不再提供标准库;
- 为了实现在不同芯片之间移植代码;
- 为了兼容所有芯片,导致代码量庞大,执行效率低下
通用输入输出端口GPIO
什么是GPIO?
组编号+引脚编号 GPIOx

推挽输出和开漏输出:
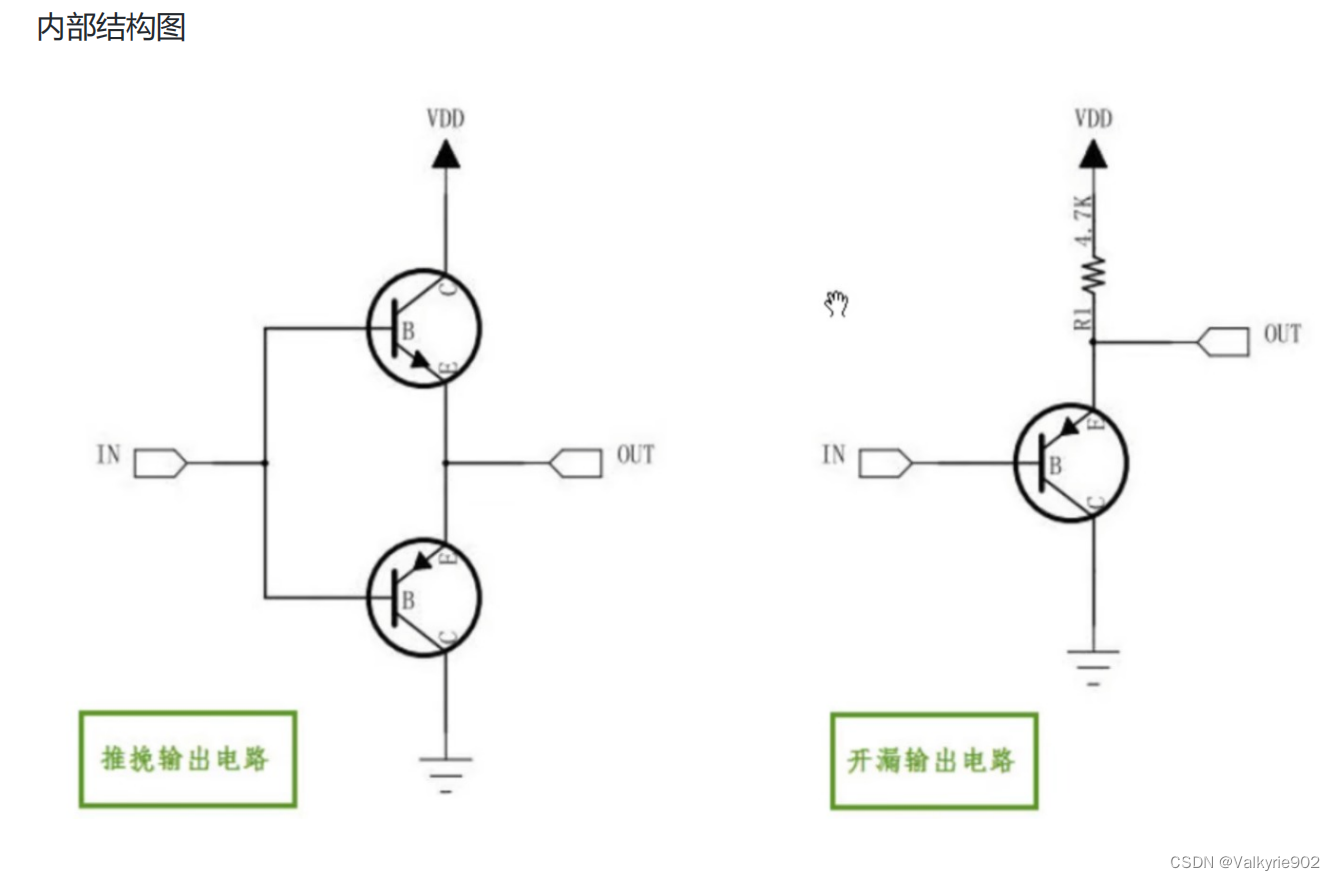
推挽输出: 可以真正的输出高电平和低电平
开漏输出: 开漏输出无法真正输出高电平,即高电平时没有驱动能力,需要借助外部上拉电阻完 成对外驱动
什么是GPIO的推挽输出和开漏输出_gpio推挽输出-CSDN博客
点亮LED
其实点亮LED的操作在上节已经实现了,这里在深入了解一下相关函数:
1. HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
效果是对一个GPIO口写入1或者0,第一个参数是GPIO的组,第二个参数是GPIO的引脚,第三个参数是引脚的状态
void HAL_GPIO_WritePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState)
{/* Check the parameters */assert_param(IS_GPIO_PIN(GPIO_Pin));assert_param(IS_GPIO_PIN_ACTION(PinState));if (PinState != GPIO_PIN_RESET){GPIOx->BSRR = GPIO_Pin;}else{GPIOx->BSRR = (uint32_t)GPIO_Pin << 16u;}
}2. HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
效果是初始化GPIO口,第一个参数是GPIO的组,第二个参数是一个结构体指针,可以通过跳转查看具体信息:
typedef struct
{uint32_t Pin; /*!< Specifies the GPIO pins to be configured.This parameter can be any value of @ref GPIO_pins_define */uint32_t Mode; /*!< Specifies the operating mode for the selected pins.This parameter can be a value of @ref GPIO_mode_define */uint32_t Pull; /*!< Specifies the Pull-up or Pull-Down activation for the selected pins.This parameter can be a value of @ref GPIO_pull_define */uint32_t Speed; /*!< Specifies the speed for the selected pins.This parameter can be a value of @ref GPIO_speed_define */
} GPIO_InitTypeDef;因此在执行GPIO的初始化之前需要自己定义一个结构体 GPIO_InitTypeDef GPIO_InitStruct = {0};
并对其中的成员进行赋值:
void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/* GPIO Ports Clock Enable */__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8|GPIO_PIN_9, GPIO_PIN_RESET);/*Configure GPIO pins : PB8 PB9 */GPIO_InitStruct.Pin = GPIO_PIN_8|GPIO_PIN_9;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);}
3. void HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_8);
效果是反转GPIO口的状态,第一个参数是GPIO的组,第二个参数是GPIO的引脚
使用轮询法实现按键点亮LED灯
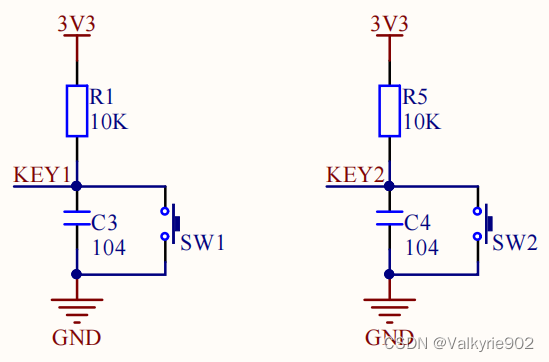
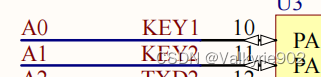
由原理图可见, 如果按钮SW1,2被按下,会对应KEY1,2被拉低,所以可以通过观察A0和A1是否被拉低来判断按钮是否被按下。
那么首先要涉及到PA0,PA1的初始化,所以可以打开上节编辑到一半的CubeMX软件来配置:
由于按键是触发输入信号将PA0和PA1设计成“GPIO_Input”:
可以将PB8,9的初始值设置为高电平,这样程序烧录之后灯不会立刻亮起来
由于是在上节的工程基础上改的,所以不需要在设置Project Manager里面的内容
点击“GENERATE CODE”生成代码:
实现的是 按钮1被按下时,LED1亮,再次按下熄灭;如果按钮2被按下时,LED2亮,再次按下熄灭
#define KEY_ON 0
#define KEY_OFF 1uint8_t Key_scan(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin)
{if(HAL_GPIO_ReadPin(GPIOx,GPIO_Pin) == GPIO_PIN_RESET){/*按键按下*/while(HAL_GPIO_ReadPin(GPIOx,GPIO_Pin) == GPIO_PIN_RESET);//按键消抖,如果按键没有被按下不会触发returnreturn KEY_ON;}else{/*按键松开*/return KEY_OFF;}
}int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();while (1){//HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8|GPIO_PIN_9, GPIO_PIN_RESET);if(Key_scan(GPIOA ,GPIO_PIN_0) == KEY_ON)//如果A0对应的按钮按下{HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_8);//反转LED1的状态}if(Key_scan(GPIOA ,GPIO_PIN_1) == KEY_ON)//如果A1对应的按钮按下{HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_9);//反转LED2的状态}}注意!!!HAL库有很多重定义的类型,例如uint8_t
需要根据使用查询!!



—— 保存视频流)















