今天来简单介绍下工业镜头中常用的参数中的三个:
1、视场
视场(FOV)也称视野,是指能被视觉系统观察到的物方可视范围。
对于镜头而言,可观察到的视场跟镜头放大倍率及相机芯片选择有关。因此需要根据被观察物体的尺寸,先确定所需的视场,再确定相机芯片尺寸及镜头放大倍率。在实际工程项目中,考虑到机械误差等问题,视场通常要大于待观测物体的实际尺寸,以确保在机械误差的范围内,物体始终位于视觉系统的可视范围内。


2、放大倍率
机器视觉行业里提到的镜头光学放大倍率通常是指垂轴放大倍率,即像和物的大小之比,计算方法
如下:
光学放大倍率=y'/y=相机芯片尺寸/视场

如:已知相机芯片为2/3英寸(8.8mm*6.6mm),
视场长宽为:10mm* 8mm。
如用长边计算,放大倍率=8.8mm/10mm=0.88x;
如用短边计算,放大倍率=6.6mm/8mm=0.825x;
此时应取小的倍率0.825x 作为待选镜头的光学放大倍率。否则,短边视场将不能满足要求。
(若取0.88倍,则短边视场=6.6mm/0.88x=7.5mm<8mm)。
在实际工程项目中,通常无需长短边都计算。经验的方法是:若视场接近于正方形或圆形,则取短边计算;若视场为长条形,则取长边计算。
3、芯片尺寸
芯片尺寸,一般为芯片的对角线尺寸,通常相机厂商是以英寸的形式表示的,但在实际计算时,需要换算成各边以毫米为单位的计量方式。 常见的芯片尺寸如下:
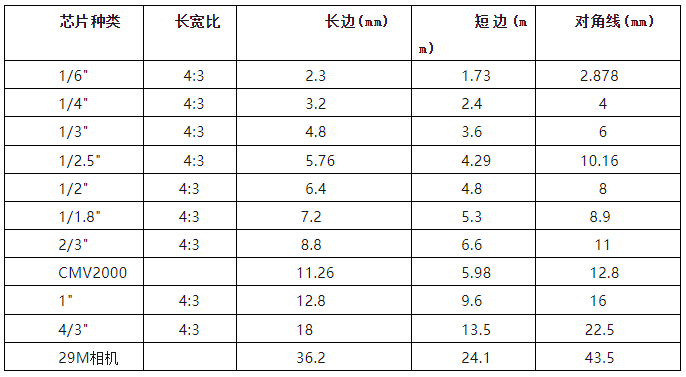
芯片尺寸计算方法是:相机像素颗数x像素尺寸=芯片尺寸。如某相机分辨率为5120x5120, 像素尺寸为4.5µmx4.5µm, 则芯片为正方形,边长=5120x4.5µm=23040µm=23.04mm。
51camera机器视觉产品资料查询平台查看更多工业镜头。











)






)
springboot集成kafka(1)介绍)