目录
- 问题:
- 阅读关键点:
- 总结
问题:
-
根据对预测模块代码的分析,发现预测框出现在点云前方的原因在于跟踪框出现在点云前方
-
对rviz上的目标进行观察后发现
-
车辆的检测框先出来一段时间后,跟踪框和预测框同步一块出来
-
跟踪框总是超出点云一部分
-
阅读关键点:
-
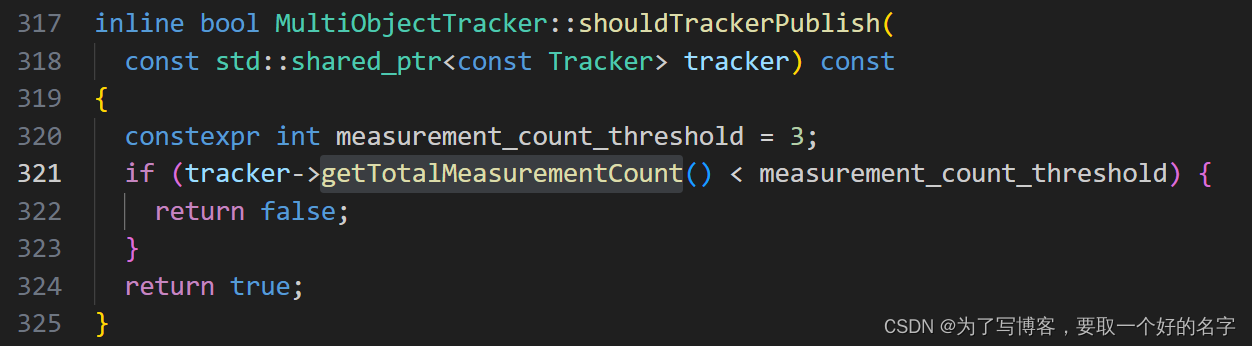
每个跟踪器最少要统计三帧的数据才可以发布,三帧的数据是程序中写死的,也可以修改
-
这个情况说明该跟踪器无法有效针对”鬼探头”的情况,最少要0.3s的时间才能做出反应
-
当目标出现前后两帧类别识别错误、移动距离过远(欧式距离、马氏距离)、形状尺寸变化过大、朝向转动幅度过大、2dIOU比例过小等情况,就会出现目标丢失的情况,默认两帧之间无关联,从而进入新的跟踪器,再次累积3帧数据。造成延时的假象。
-









![[法规规划|方案实操]数据资产入表,城投将获融资新渠道](http://pic.xiahunao.cn/[法规规划|方案实操]数据资产入表,城投将获融资新渠道)



)


)


