首先你得从mt4把数据导出为csv:mt4如何导出数据-CSDN博客
1、引入必要的库
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt2、然后通过pandas载入csv数据
raw = pd.read_csv("XAUUSDm1.csv", header=None, index_col=None, parse_dates=True, names=['data', 'time', 'open', 'hight', 'low', 'close', 'volume'])3、截取最新收盘价作为坐标的y轴(在这里我导出的是10年数据)
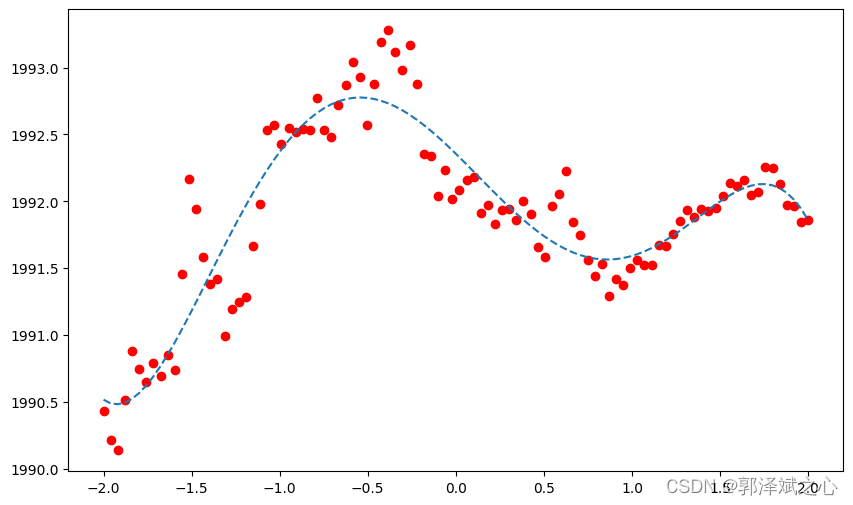
y = raw['close'].iloc[-100:].to_numpy()4、等矩平均分配x坐标(在这里,x轴没有任何意义)
x = np.linspace(-2, 2, len(y))5、计算回归曲线并计算x坐标上对应y坐标
reg = np.polyfit(x, y, deg=5)
p = np.polyval(reg, x)6、绘制变化曲线及收盘价格点
plt.figure(figsize=(10, 6))
plt.plot(x, y, 'ro', label='close price')
plt.plot(x, p, '--', label='p price')7、效果如下:
![P1024 [NOIP2001 提高组] 一元三次方程求解题解](http://pic.xiahunao.cn/P1024 [NOIP2001 提高组] 一元三次方程求解题解)
![YOLOv5代码解读[01] train.py](http://pic.xiahunao.cn/YOLOv5代码解读[01] train.py)
)








![[office] Excel中DCOUNT函数在复杂的数据中统计应用图解教程 #职场发展#其他#媒体](http://pic.xiahunao.cn/[office] Excel中DCOUNT函数在复杂的数据中统计应用图解教程 #职场发展#其他#媒体)

)

 Pandas.DataFrame groupby样式保存xlsx)

--多头注意力)

