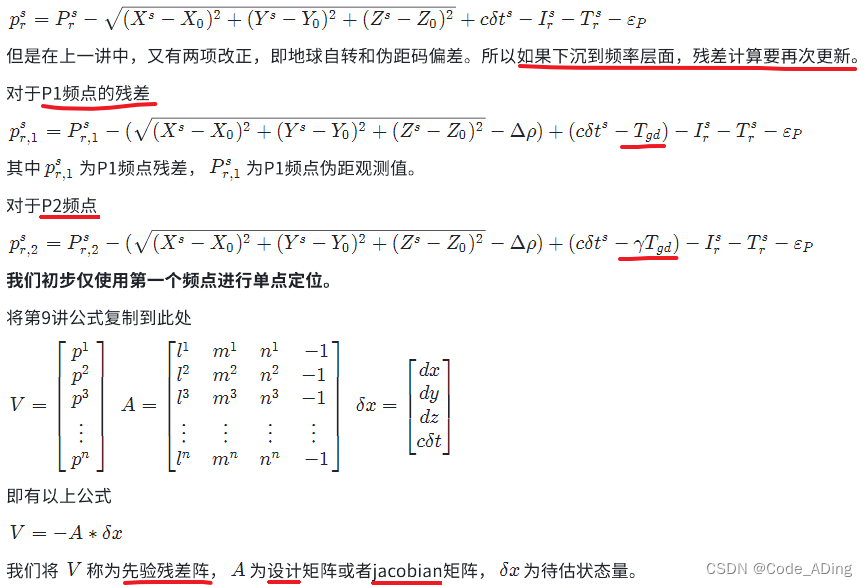
1.基于 地球自转改正卫地距 以及 伪距码偏差 重构定位方程:
先验残差计算公式如下所示:
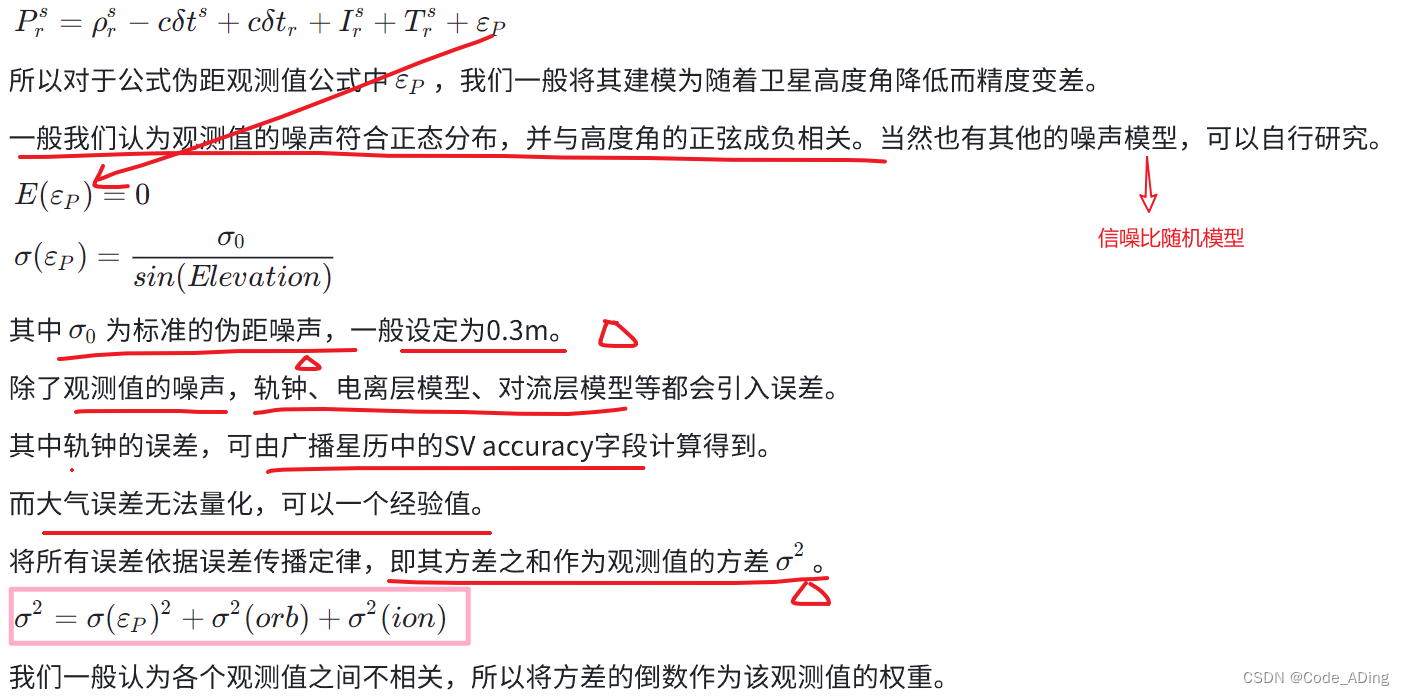
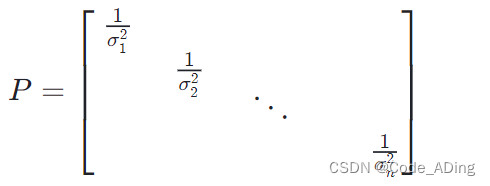
2.观测值如何定权?权重如何确定?
每个卫星的轨钟精度以及电离层模型修正后的误差都有差异,所以我们不能简单的将各个观测值等权处理。理论上来说,我们头顶的卫星穿过电离层区域相对较短,且不容易受地面建筑物的遮挡,理论上来说观测值精度更高。
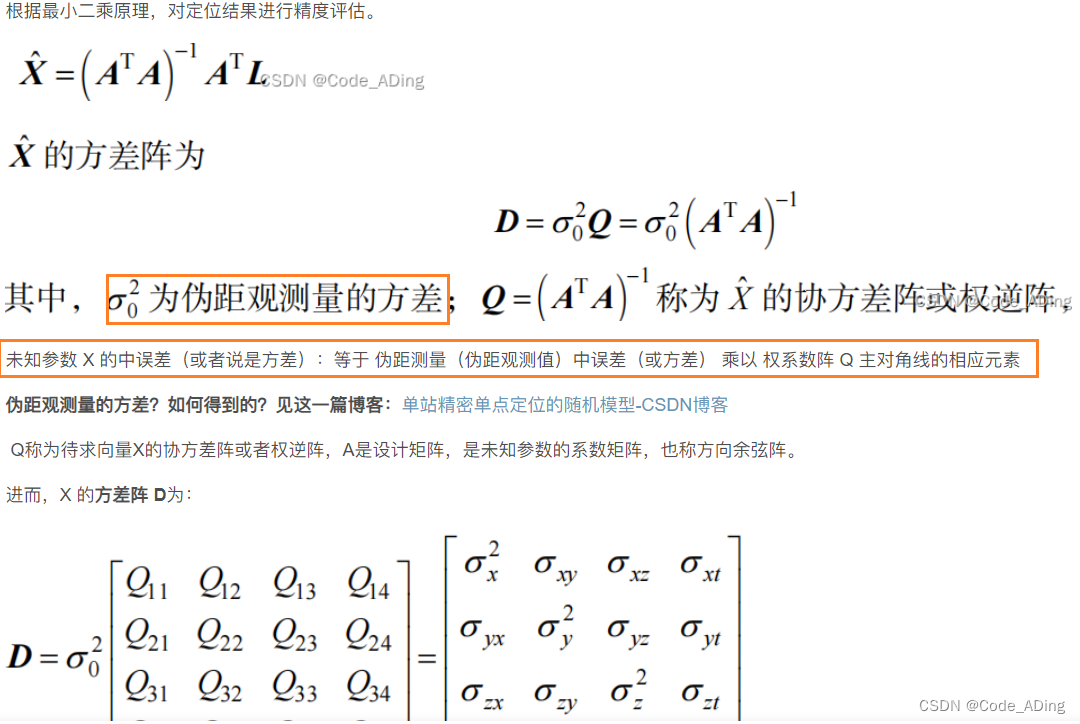
3.最小二乘法与最小二乘的状态量解

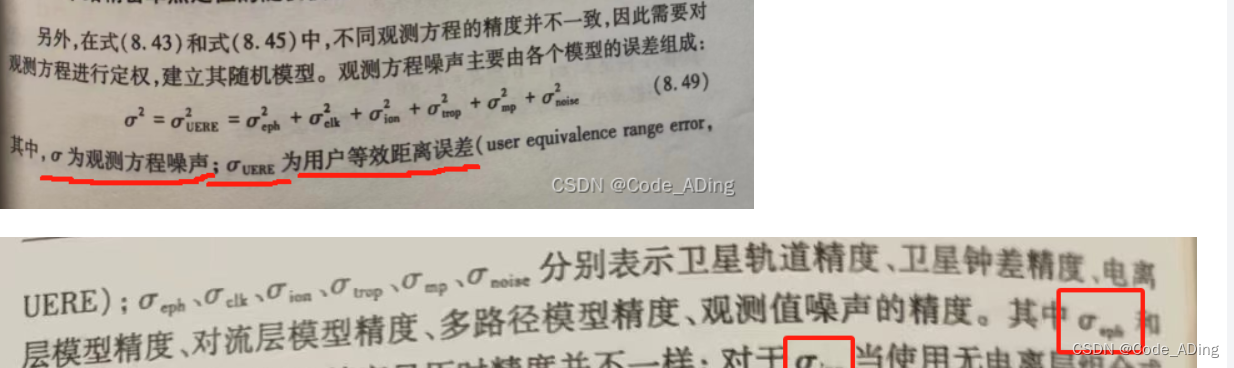
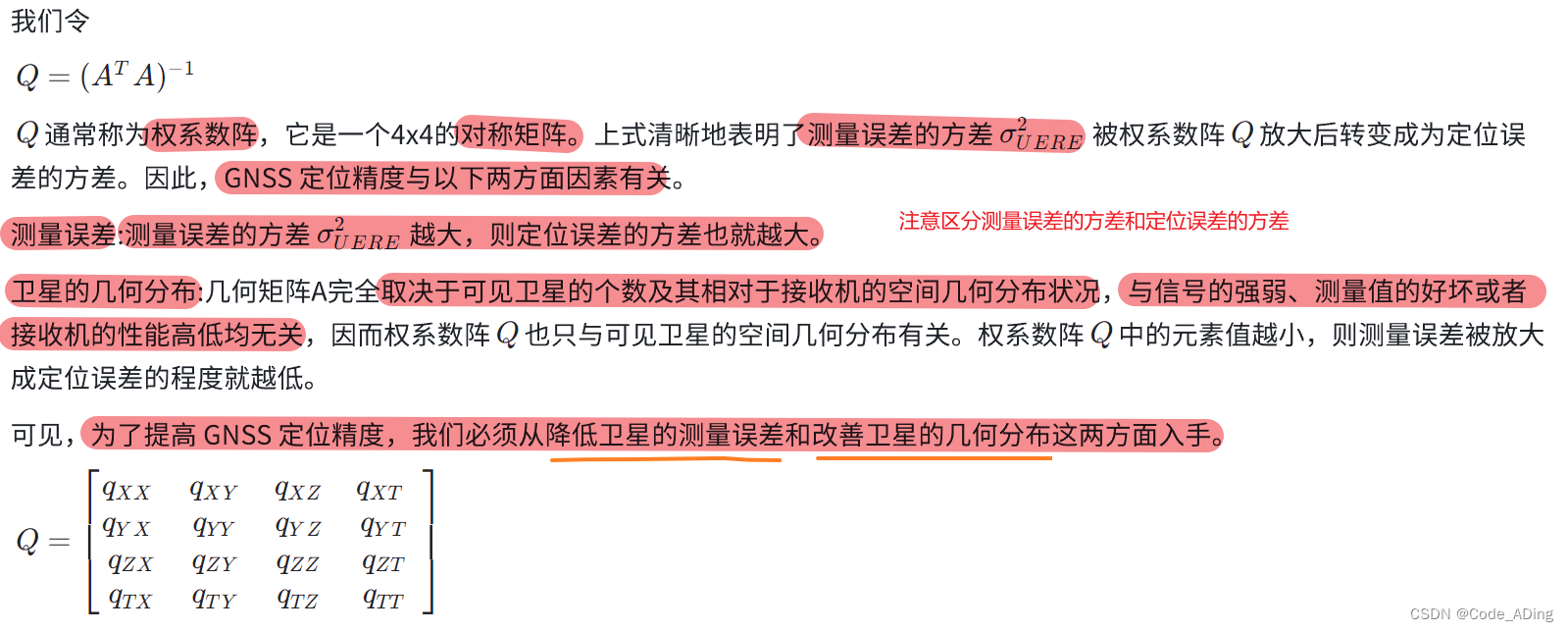
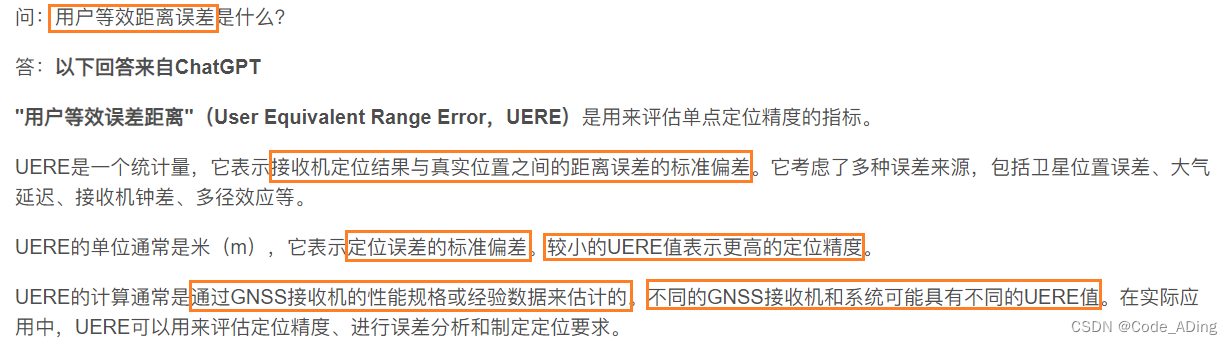
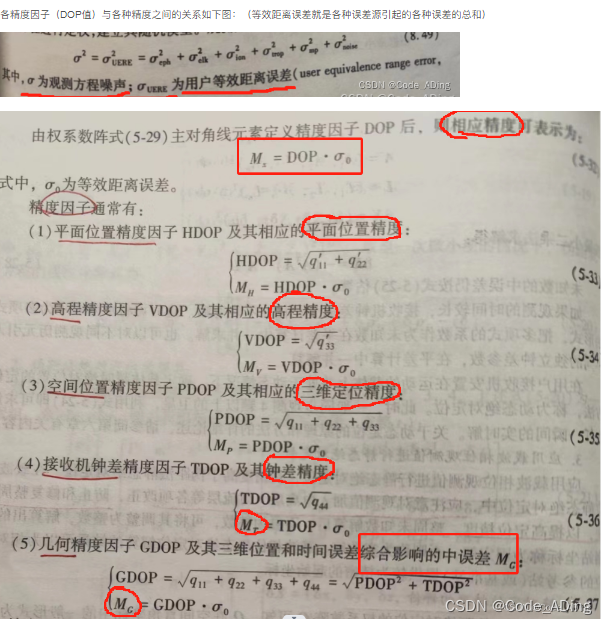
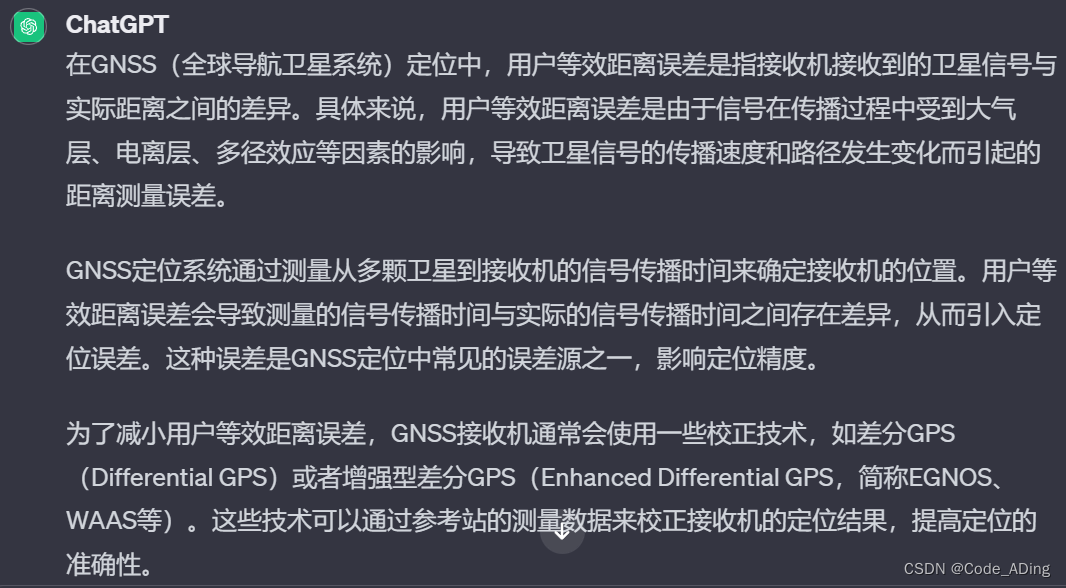
4.等效距离方差UERE?定位精度因子?
等效距离误差:用户测距误差(URE)的方差
通常把各种误差的影响(上述的所有误差方差之和:卫星轨道精度、卫星钟差精度、电离层模型精度、对流层模型精度、多路径模型精度、观测值噪声的精度)投影到至卫星的距离上,用相应的距离误差表示,并称为等效距离误差UERE(User Equivalent Range Error)。这是一种度量各种因素的影响大小的度量方式,即这个因素的影响相当于使测定精度误差多少距离。


如何将ecef框架下的空间直角坐标系表示的Q协因数矩阵转换为ENU站心坐标系下(也即大地坐标系下的表达形式,是为了估算测点的位置精度)的Q协因数矩阵?
如何得到水平精度和垂直精度?通过水平精度衰减因子和垂直精度衰减因子,乘以等效距离误差,即可得到大地坐标系下的水平精度和垂直精度



以下是另一种说法:把等效距离误差看成是伪距观测值的方差
5.刚开始定位(伪距单点定位;而在精密单点定位中,使用的初始接收机位置是伪距单点定位spp计算得到的接收机位置)时,我们无法知道接收机的概略位置,所以可以给(0,0,0)作为初值。通过迭代,逐渐收敛到真实位置坐标。












)
——线程同步)





