写在前面
最近项目一直用matlab,防止手生整一个回忆工具使用的简单的pid demo,走一边流程,包括配工程debug看结果,复用之前记录的配置见我的bloghttps://blog.csdn.net/weixin_46479223/article/details/135082867?csdn_share_tail=%7B%22type%22%3A%22blog%22%2C%22rType%22%3A%22article%22%2C%22rId%22%3A%22135082867%22%2C%22source%22%3A%22weixin_46479223%22%7D。visual studio在这方面感觉比vscode 方便不少
使用说明,不基于内容是什么,主要是配置好基本内容可以快速编译打印验证,或者配置visualstudio,单个文件的话可以使用在线ide页面https://godbolt.org/
结构
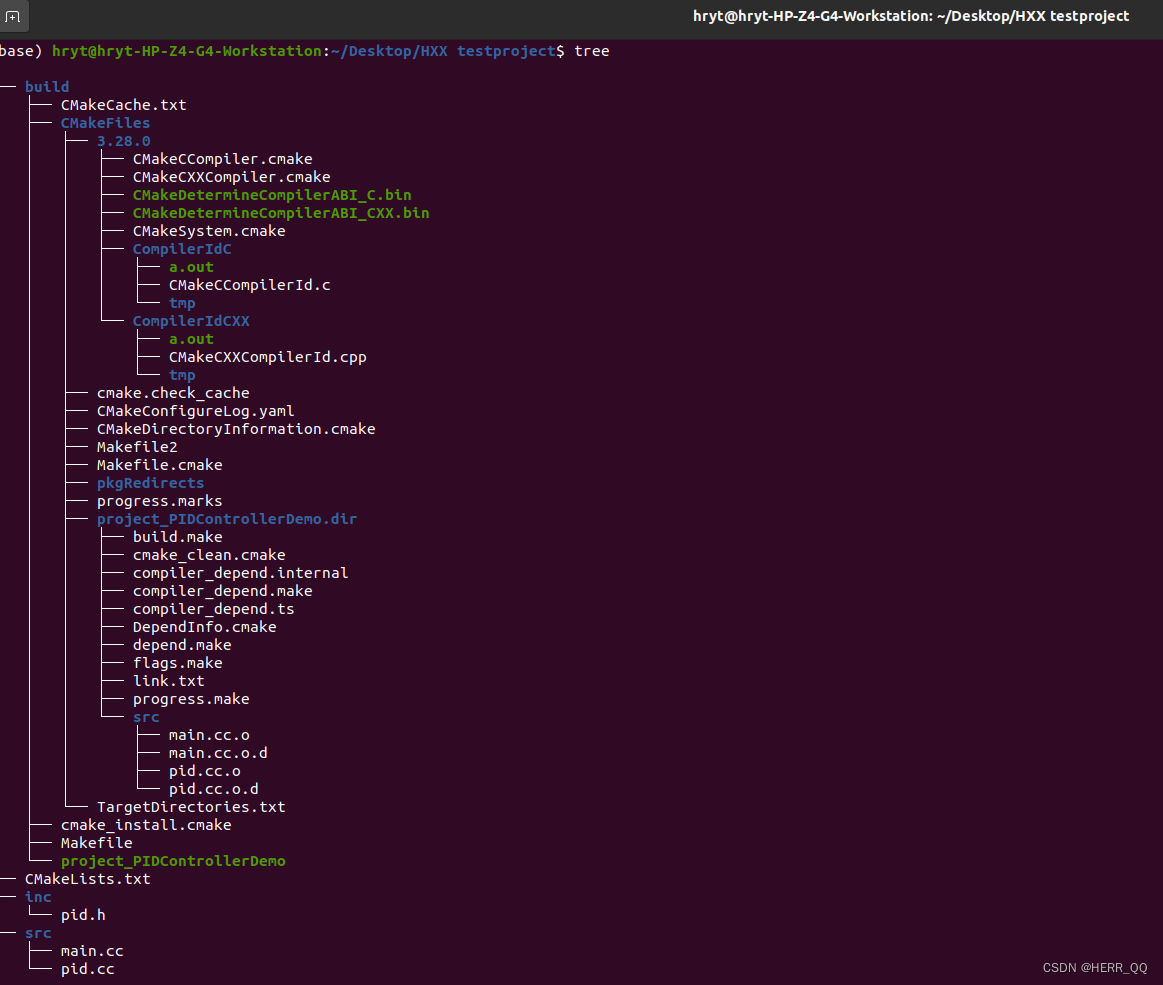
cmakelist
cmake_minimum_required(VERSION 3.14.1)
project(project_PIDControllerDemo)
set( CMAKE_CXX_STANDARD 11 )
set( CMAKE_CXX_STANDARD_REQUIRED ON )
set( THREADS_PREFER_PTHREAD_FLAG ON )function(include_sub_directories_recursively root_dir)if (IS_DIRECTORY ${root_dir})include_directories(${root_dir})file(GLOB children RELATIVE ${root_dir} ${root_dir}/*)foreach(child ${children})if (IS_DIRECTORY ${root_dir}/${child})include_sub_directories_recursively(${root_dir}/${child})endif()endforeach()endif()
endfunction()function(aux_source_directory_recursively root_dir var_name)if(IS_DIRECTORY ${root_dir})aux_source_directory(${root_dir} TMP_SRC_LIST)set(${var_name} ${${var_name}} ${TMP_SRC_LIST} PARENT_SCOPE)file(GLOB children RELATIVE ${root_dir} ${root_dir}/*)foreach(child ${children})if(IS_DIRECTORY ${root_dir}/${child})aux_source_directory_recursively(${root_dir}/${child} ${var_name}) endif()endforeach()endif()
endfunction()find_package(glog REQUIRED)
find_package(Eigen3 REQUIRED)
#find_package(osqp REQUIRED )
find_package(OsqpEigen REQUIRED)
find_package(yaml-cpp REQUIRED)Set(GLOG_INCLUDE_DIRS "/usr/include/glog/")
Set(GLOG_LIBRARIES "/usr/lib/x86_64-linux-gnu/libglog.so")
#Set(GLOG_LIBRARIES "/usr/local/lib/libglog.so")# message(STATUS "GLOG_INCLUDE_DIRS: ${GLOG_INCLUDE_DIR}")
# message(STATUS "GLOG_LIBRARIES: ${GLOG_LIBRARIES}")
# message(STATUS "EIGEN3_INCLUDE_DIR: ${EIGEN3_INCLUDE_DIR}")
# message(STATUS "EIGEN3_LIBRARIES: ${EIGEN3_LIBRARIES}")
# message(STATUS "osqp_INCLUDE_DIR: ${osqp_INCLUDE_DIR}")
# message(STATUS "osqp_LIBRARIES: ${osqp_LIBRARIES}")set(CMAKE_BUILD_TYPE "Debug")
set(CMAKE_INCLUDE_CURRENT_DIR ON)# aux_source_directory(${CMAKE_CURRENT_SOURCE_DIR} SRC_LIST)aux_source_directory(${CMAKE_CURRENT_SOURCE_DIR}/src/. SRC_LIST)aux_source_directory(${CMAKE_CURRENT_SOURCE_DIR}/commen/. SRC_LIST)#aux_source_directory_recursively(${CMAKE_CURRENT_SOURCE_DIR}/src SRC_LIST)
include_sub_directories_recursively(${CMAKE_CURRENT_SOURCE_DIR}/include)
include_sub_directories_recursively(${CMAKE_CURRENT_SOURCE_DIR}/libs)
include_sub_directories_recursively(${CMAKE_CURRENT_SOURCE_DIR}/src)
include_sub_directories_recursively(${CMAKE_CURRENT_SOURCE_DIR}/inc)##############################debug start##############################
get_property(include_dirs DIRECTORY ${CMAKE_CURRENT_SOURCE_DIR} PROPERTY INCLUDE_DIRECTORIES)foreach(dir ${include_dirs})message("Include directory: ${dir}")
endforeach()message("Source files:")
foreach(file IN LISTS SRC_LIST)message(" ${file}")
endforeach()
#################################debug end####################################include_directories(${GLOG_INCLUDE_DIRS})
include_directories(${EIGEN3_INCLUDE_DIR})add_executable(${PROJECT_NAME} ${SRC_LIST})
#add_library(${PROJECT_NAME} STATIC ${SRC_LIST}) # temp use
target_include_directories(${PROJECT_NAME} PRIVATE ${GLOG_INCLUDE_DIRS})
#target_include_directories(${PROJECT_NAME} PRIVATE ${OSQP_INCLUDE_DIRS})
#target_link_libraries(${PROJECT_NAME} OsqpEigen::OsqpEigen)
target_link_libraries(${PROJECT_NAME} PRIVATE ${GLOG_LIBRARIES})
target_link_libraries(${PROJECT_NAME} PRIVATE ${EIGEN3_LIBRARIES})
target_link_libraries(${PROJECT_NAME} PRIVATE yaml-cpp)# link_directories(${CMAKE_CURRENT_SOURCE_DIR}/libs/yaml-cpp/)# for all
# target_link_libraries(${PROJECT_NAME} PRIVATE libyaml-cpp.a)
#target_link_libraries(${PROJECT_NAME} PRIVATE ${CMAKE_CURRENT_SOURCE_DIR}/libs/yaml-cD/libyaml-cD.a)
#target_link_libraries(${PROJECT_NAME} PRIVATE osqp::osqp)
#####################################unit test ###################################
# add_executable(unit_test_pathFW ${SRC_LIST})
# target_link_libraries( unit_test_pathFW
# ${GLOG_LIBRARIES}
# # ${CMAKE_CURRENT_SOURCE_DIR}/libs/yaml-cD/libyaml-cD.a
# ${CMAKE_CURRENT_SOURCE_DIR}/libs/yaml-cD/libyaml-cD.a
# # yaml-cD
# )
#####################################unit test end#################################
c_cpp_properties.json
{"configurations": [{"name": "Linux","includePath": ["${workspaceFolder}/**","${workspaceFolder}/inc","/usr/include/**"],"defines": [],"compilerPath": "/usr/bin/gcc","cStandard": "c17","cppStandard": "gnu++14","intelliSenseMode": "linux-gcc-x64"}],"version": 4
}
launch.json
{// 使用 IntelliSense 了解相关属性。 // 悬停以查看现有属性的描述。// 欲了解更多信息,请访问: https://go.microsoft.com/fwlink/?linkid=830387"version": "0.2.0","configurations": [{"name": "(gdb) 启动","type": "cppdbg","request": "launch","program": "${workspaceFolder}/build/project_PIDControllerDemo","args": [],"stopAtEntry": false,"cwd": "${fileDirname}","environment": [],"externalConsole": false,"MIMode": "gdb","setupCommands": [{"description": "为 gdb 启用整齐打印","text": "-enable-pretty-printing","ignoreFailures": true},{"description": "将反汇编风格设置为 Intel","text": "-gdb-set disassembly-flavor intel","ignoreFailures": true}]}]
}pid.h
# ifndef _PID_H_
# define _PID_H_#include <cmath>
#include <algorithm># define RUNCYCLE 0.02class PID{public:PID(): ki_(0), kp_(0), kd_(0){}PID(const float& KI,const float& KP,const float& KD): ki_( KI), kp_( KP)
, kd_(KD){}PID(const PID& pid)=delete;~PID(){}void updatePos();void calError(const float & targetPos);float getRes();private:float ki_ ;float kp_;float kd_;float error_ {0.f};float pos_ {0.f}; float res_ {0.f};
};# endif
pid.cc
#include "pid.h"using namespace std;void PID:: calError( const float & targetPos ){float error_i=0.f,error_d=0.f,error_p=0.f; static float error_last=0;error_p=targetPos-pos_;error_i=RUNCYCLE*error_p;error_d=(error_p-error_last)/RUNCYCLE;if (error_p*error_p<0){error_i=0;}error_i=min(error_i,3.f);error_i=max(error_i,-3.f);error_last=error_p;res_= ki_*error_i+kp_*error_p+kd_*error_d;}void PID:: updatePos(){pos_+=res_*RUNCYCLE;}float PID:: getRes(){return pos_;}
main.cc
# include "pid.h"
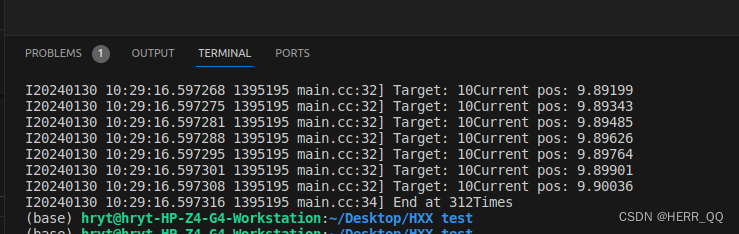
#include <glog/logging.h>int main(int argc, char* argv[]){google::InitGoogleLogging(argv[0]);google::SetStderrLogging(google::GLOG_ERROR); FLAGS_colorlogtostderr = true;FLAGS_logtostderr = true; FLAGS_minloglevel = 0; PID pidUser (0.3f,1.f,0.5f); // user defined parametersint Target=10; // user definedint count=0; // counter LOG(INFO) << "Hello,myPID";while (fabs(Target-pidUser.getRes())>0.1&&count<1000){pidUser.calError(Target);pidUser.updatePos();count++;LOG(INFO) << "Target: "<<Target<< "Current pos: "<< pidUser.getRes();}LOG(INFO) << "End at "<< count<< "Times"; google::ShutdownGoogleLogging();
}
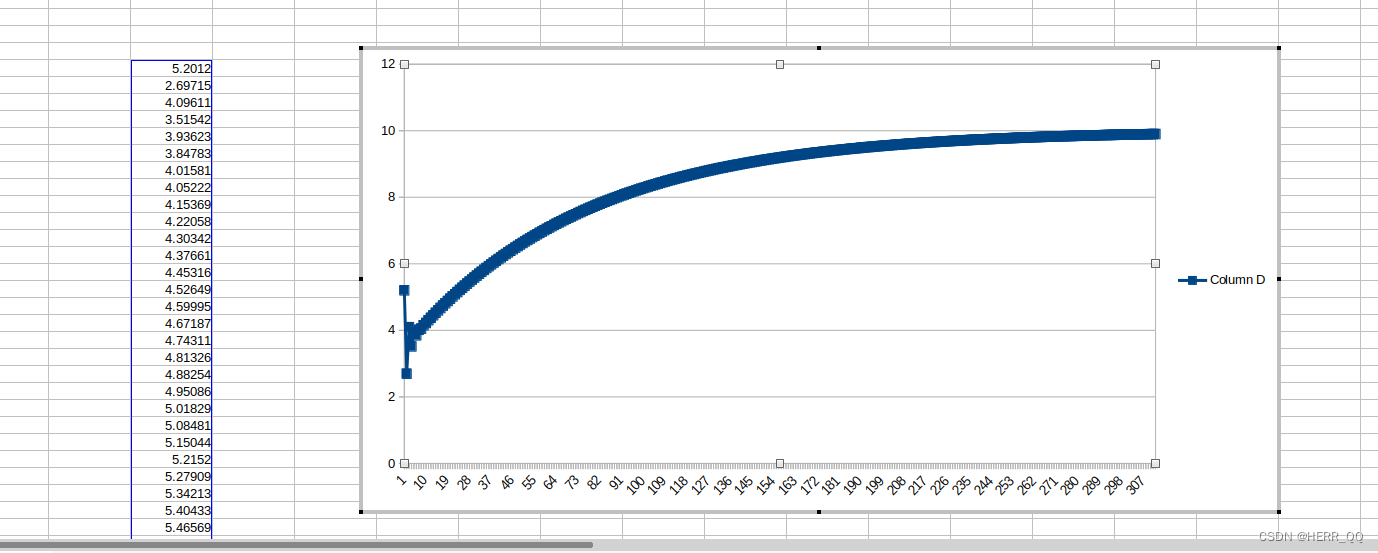
结果
用重定向 放入excel中画图展示如下

)


)





)


![[C语言][C++][时间复杂度详解分析]二分查找——杨氏矩阵查找数字详解!!!](http://pic.xiahunao.cn/[C语言][C++][时间复杂度详解分析]二分查找——杨氏矩阵查找数字详解!!!)





