ROS(Robot Operating System)是一个灵活的、分布式的系统架构,用于构建机器人软件。它由一系列工具、库和约定组成,提供了一套通用的功能和通信机制,以支持机器人系统的开发、部署和运行。
ROS架构主要包括以下几个核心概念和组件:
1.节点(Nodes):ROS中的节点是独立运行的进程,是软件模块的最小单元。节点可以是传感器驱动程序、控制器、算法节点等,它们通过ROS的通信机制相互交互和通信。
2.主题(Topics):主题是节点之间进行发布-订阅通信的通道。一个节点(发布者)可以通过发布消息到一个主题,而其他节点(订阅者)可以通过订阅该主题来接收相应的消息。主题实现了一对多的消息传递机制。
3.服务(Services):服务提供了节点之间的一对一的同步通信机制。节点可以提供服务,而其他节点可以通过调用该服务来请求执行特定的功能。服务调用者将等待响应返回后才能继续执行。
4.参数服务器(Parameter Server):参数服务器是ROS中用于存储和传递配置参数的机制。节点可以读取和修改参数服务器上的参数,实现配置的共享和动态调整。
5.消息(Messages):消息是ROS中节点之间传递的数据类型。消息由消息类型定义,消息类型定义了消息的结构和字段。开发者可以使用.msg文件来定义消息类型,并使用ROS的工具生成相应的消息处理代码。
6.节点管理器(Node Manager):节点管理器负责协调和监控节点的运行。它可以帮助节点发现、连接和通信,并提供节点的状态信息和管理功能。
7.工具集(Toolset):ROS提供了丰富的工具集,用于辅助开发、调试和实验机器人系统。这些工具包括命令行工具、可视化工具、仿真工具等,可以提高开发效率和系统调试能力。
通过上述组件和概念,ROS架构支持模块化和分布式的机器人软件开发。它允许开发者以独立的节点形式组织和部署软件模块,并通过统一的通信机制实现节点之间的数据传递和消息交互。这种灵活性和模块化的设计使得ROS成为一个强大的机器人开发平台,广泛应用于学术界和工业界的机器人研究和实践中。
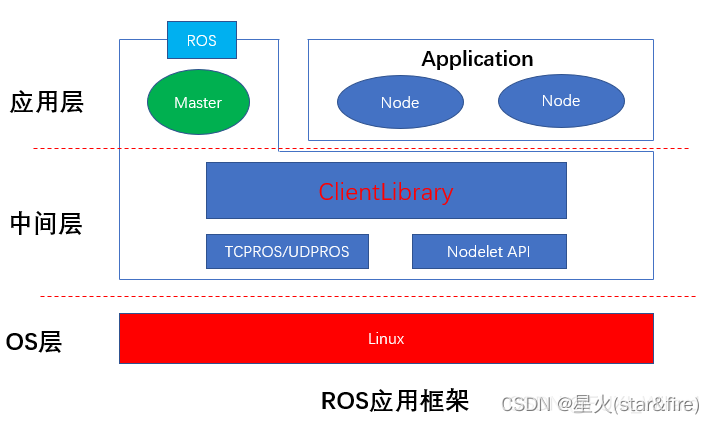
ROS架构设计
功能包
ROS功能包是ROS中的软件模块,用于组织和管理ROS工程。功能包是一个文件夹,其中包含了一些相关的节点、消息、服务、参数配置文件等,以实现特定的功能或任务。
一个ROS功能包通常包含以下重要的元素:
1.节点(Nodes):节点是功能包的基本组成单元,是独立的可执行文件。一个功能包可以包含一个或多个节点,每个节点完成特定的任务,例如传感器数据采集、控制算法运算等。
2.消息(Messages)和主题(Topics):消息是节点之间进行通信的数据格式,而主题是消息的传输通道。功能包可以定义自己的消息类型,并使用主题进行数据发布和订阅,实现节点之间的数据交流。
3.服务(Services):服务提供了一种同步的请求-响应通信方式,用于节点之间的交互。功能包可以定义自己的服务类型,通过服务请求和服务响应来实现具体的功能。
4.参数(Parameters):参数用于存储配置信息或运行时参数,如控制参数、传感器参数等。功能包可以定义自己的参数,以便在节点中读取和使用。
5.启动文件(Launch Files):启动文件是用于启动和配置节点的XML文件。功能包可以包含一个或多个启动文件,用于定义系统中需要启动的节点、节点参数配置等。
6.动作(Actions):动作提供了一种更复杂的通信机制,可以处理连续的目标和反馈。功能包可以定义自己的动作类型,以实现复杂的任务执行。
7.资源文件(Resource Files):资源文件包括图片、模型、配置文件等,在功能包中用于支持节点运行或其他功能的实现。
通常,ROS功能包会根据功能或任务的不同进行组织和划分,以方便开发、测试和维护。使用功能包可以将不同的模块解耦并进行独立开发,提高代码的复用性和可维护性。通过ROS的工具和命令,可以管理和操作功能包,如创建新的功能包、编译、运行和部署功能包等。
资源文件
在ROS中,资源文件用于存储在功能包中用于支持节点运行或其他功能的各种文件。资源文件可以包括但不限于以下类型:
1.配置文件(Configuration Files):配置文件是一种常见的资源文件类型,用于存储各种参数和设置。例如,一个运动控制功能包可能包含一个配置文件,其中定义了机器人运动的参数,如最大速度、加速度等。
2.模型文件(Model Files):模型文件用于描述物理实体的几何结构和特征,如机器人、传感器、环境等。这些文件可以是3D模型文件(如STL、OBJ等)或者描述语言文件(如URDF、SDF等)。
3.地图文件(Map Files):地图文件用于存储环境地图的数据,如二维栅格地图或三维点云地图。这些地图文件可以用于导航、路径规划等任务。
4.图像文件(Image Files):图像文件用于存储图像数据,如传感器采集的相机图像、深度图像等。这些图像文件可以用于图像处理、目标识别等任务。
5.参数文件(Parameter Files):参数文件用于存储参数配置信息,如节点的初始参数、默认参数等。这些文件可以通过ROS参数服务器加载到节点中,以便在运行时使用。
6.脚本文件(Script Files):脚本文件用于执行各种自动化任务,如启动节点、执行测试等。常见的脚本文件类型包括Shell脚本、Python脚本等。
7.数据文件(Data Files):数据文件用于存储节点运行所需的数据,如训练数据、预训练模型等。这些文件可以被ROS节点加载和使用。
在功能包的文件结构中,一般会有一个名为"resources"或"res"的文件夹用于存放资源文件,但这并非强制要求,你可以根据自己的需求和习惯来组织资源文件。
通过使用资源文件,可以将节点所需的各种文件集中管理,并方便地在ROS系统中进行使用和共享。使用资源文件可以提高代码的可读性、维护性以及功能包的可移植性和复用性




)

)

 和 closePath())


中drontab定时器命令详解)



)
)


