背景
自动驾驶坡度对纵向的跟踪精度和体感都有一定程度的影响。行车场景虽然一般搭载了GPS和IMU设备,但pitch角一般不准,加速度也存在波动大的特点。泊车场景一般在室内地库,受GPS信号遮挡影响,一般无法获取高程和坡度。搭载昂贵的传感器虽然也能获取所需的坡度,但成本高不利于量产。基于以上矛盾点,基于算法的状态观测器就显得尤为迫切。本文基于运动学方程和卡尔曼滤波,根据测量的速度v,底盘加速度a实时估计出坡度值slope.
1.建立运动学方程
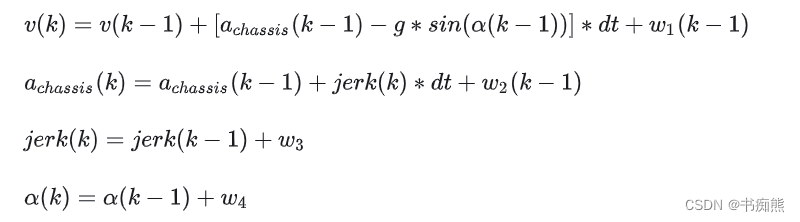
由于自动驾驶场景坡度一般不大,可近似认为 sin(alpha)=alpha ,写成矩阵的形式如下:

2.使用卡尔曼滤波
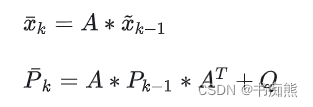
由于本文建立的状态方程没有控制量u项,因此根据线性方程的卡尔曼滤波可得如下状态:
预测方程
校正方程

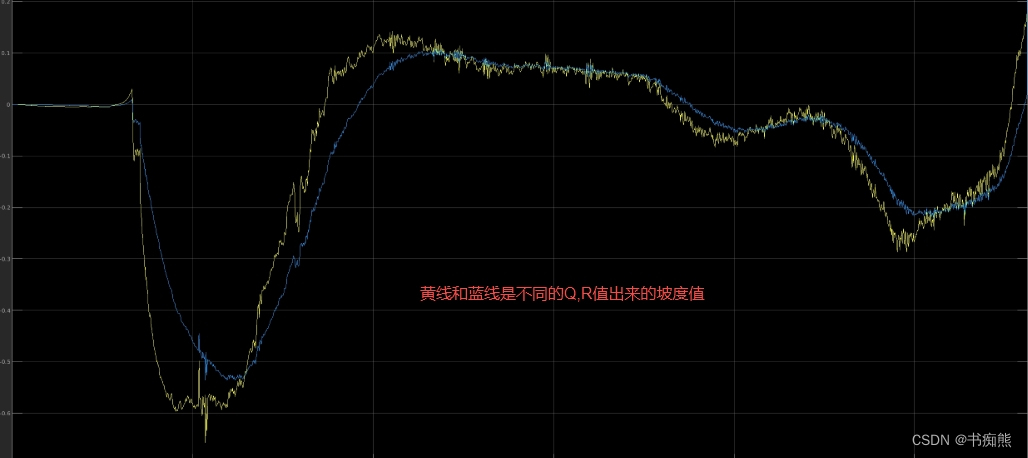
3.仿真效果

)
— 碰撞检测)
















