
对救援人员和户外运动爱好者来说,穿越荒野小径是一项有用的技能,但对机器人来说却很难。这并不是说这些机械动物没有能力在爬上山坡的同时避开倒下的树枝——最先进的机器学习算法可以做到这一点。问题在于它们缺乏通用性:人工智能驱动的机器人经常在他们从未见过的环境中挣扎。
科罗拉多大学(University of Colorado)的研究人员最近在一篇发表在预印本服务器Arxiv.org上的论文(“荒野小径上机器人的虚拟到现实转移学习”)中提出了一个解决方案。他们的方法利用了多种深度学习模型。这是一种模拟神经的数学功能,可以帮助机器人从摄像机镜头中判断出远足路线的方向。
研究人员写道:“机器人在许多涉及户外使用的场景中都很有前途,比如搜救、野生动物管理和收集数据以改善环境、气候和天气预报。”“然而,户外步道的自主导航仍是一个具有挑战性的问题……在许多情况下,收集和管理训练数据集可能不可行或不实用,尤其是在步道条件可能因季节性天气变化、风暴和自然侵蚀而改变的情况下。”
正如这篇论文的作者所指出的,户外步道有很多变化。它们由任意数量的材料(如砾石、泥土和覆盖物)定义,它们跨越不同的生物群落,如森林、草地和山脉。此外,它们的外观随着季节、天气和一天中的时间而变化,而且它们经常被茂密的植被部分遮挡。
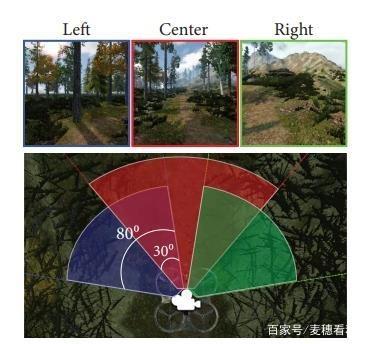
收集和标记训练一个健壮的系统所必需的真实数据将是非常耗时的,因此,研究人员转而寻找虚拟户外步道的合成图像。为了制作它们,他们在Unity中组装了一个带有泥土小道的高山场景,并用Unity Asset Store中的树木、岩石和草的3D模型来点缀它。然后,他们释放了一个带有三个摄像头的虚拟机器人——每个摄像头的分辨率为400×400像素,视野为80度——来收集20,269张风景图片。
研究小组将图像的分辨率调整为100×100×3像素,这样处理速度更快,内存消耗更低。然后他们将集合分成三组:一组用于培训,一组用于验证,第三组用于测试。
训练数据集被输入到三种结构不同的神经网络:深度神经网络(deep neural network, DNN)、卷积神经网络(tional neural network, CNN)和递归神经网络(regression neural network, RNN)。在人工智能完全控制虚拟机器人的实验中,一个模型——RNN——成功预测出正确的轨迹方向,准确率达到95.02%。重要的是,在另一项测试中,研究人员在4000幅真实世界图像的数据集上训练了所有三种人工智能算法,DNN模型的准确率达到58.41%,超过了基线,表明虚拟到真实世界的转移学习有潜力超过一些传统的计算机视觉方法。
研究人员在报告中写道:“我们观察到,该机器人在包括急转弯和大圆石等障碍物在内的路径导航方面取得了很大的成功。”“此外,我们观察到几个‘明智’决策的例子;在一次试验中,机器人在遇到一个大障碍物后,会短暂地偏离轨道,但之后又会回到轨道上继续飞行。
这三种神经网络的表现都不完美。该机器人偶尔会将特定的地形区域误认为是步道特征,从而使其偏离航线。研究人员承认Unity的低质量地形包不允许对象之间有“足够的差异”。(他们把提高通用性的技术探索留给了未来的工作,比如用程序生成不同条件下的地形。)
但他们认为,他们的工作为可能加快机器人地形导航人工智能训练的方法奠定了基础。
“机器人电池寿命、人类疲劳和安全问题是人工数据收集的主要挑战;然而,通过我们的方法,这些问题可以避免,因为标记数据生成可以在虚拟环境中快速高效地执行,”研究人员写道。“然后,机器人可能会接受虚拟训练,以导航难以进入和/或危险的地形,包括目前不可能进入和收集真实数据的新地形(例如火星),而从未接触过这些环境。”
举报/反馈
猴子吃桃)


斐波那契数列)


快速幂)


弹簧板)

最大公约数)

括号匹配)

网页跳转)

堆积木)
计算集合的并)
