freertos临界段保护
- 中断的基础知识
- cortex-m里面开中断、关中断指令
- 关中断和开中断
- 进入临界段和退出临界段
中断的基础知识
嵌套:
嵌套向量中断控制器 NVIC(Nested Vectored Interrupt Controller与内核是紧耦合的。提供如下的功能:可嵌套中断支持、向量中断支持、动态优先级调整支持、中断延迟大大缩短、 中断可屏蔽。
所有的外部中断和绝大多数系统异常均支持可嵌套中断。异常都可以被赋予不同的优先级,当前优先级被存储在 xPSR的专用字段中。当一个异常发生时,硬件自动比较该异常的优先级和当前的异常优先级,如果发现该异常的优先级更高,处理器就会中断当前的中断服务例程(或者是普通程序),而服务新来的异常(立即抢占)。
如果优先级组设置使得中断嵌套层次很深,要确认主堆栈空间足够用。 异常服务程序总是使用MSP,主堆栈的容量应是嵌套最深时需要的量。
优先级:
CM3 支持中断嵌套,使得高优先级异常会抢占(preempt)低优先级异常。
有3个系统异常:复位,NMI 以及硬 fault,它们有固定的优先级,并且优先级号是负数,高于所有其它异常。所有其它异常的优先级都是可编程的(但不能编程为负数)。
CM3 支持3个固定的高优先级和多达256级的可编程优先级,并且支持128级抢占。但是大多数CM3芯片实际上支持的优先级数会更少如8级、16级、32级等。
裁掉表达优先级的几个低端有效位,从而让优先级数减少。如果使用更多的位来表达优先级,优先级数增加,需要的门也更多,带来更多的成本和功耗。
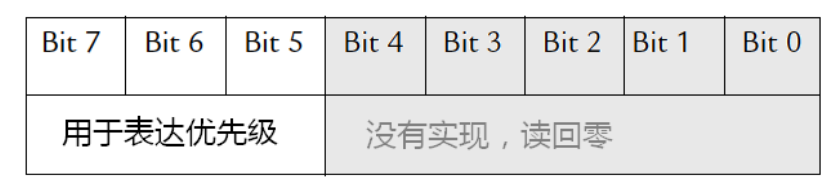
使用3个位来表达优先级,优先级配置寄存器的结构如下图所示,能够使用的8个优先级为:0x00(最高),0x20,0x40,0x60,0x80, 0xA0,0xC0,0xE0。
为了使抢占机能变得更可控,CM3 把 256 级优先级按位分成高低两段,分别是抢占优先级和亚优先级。抢占优先级决定了抢占行为。当抢占优先级相同的异常有不止一个悬起时,就优先响应亚优先级最高的异常(亚优先级处理内务)。
优先级分组规定:亚优先级至少是1个位。所以抢占优先级最多是7个位,最多只有 128 级抢占的现象。
下图是只使用 3 个位来表达优先级,从bit5处分组,得到4级抢占优先级,每个抢占优先级的内部有2个亚优先级。

下图是3 位优先级,从比特1处分组,(虽然[4:0]未使用,却允许从它们中分组)。

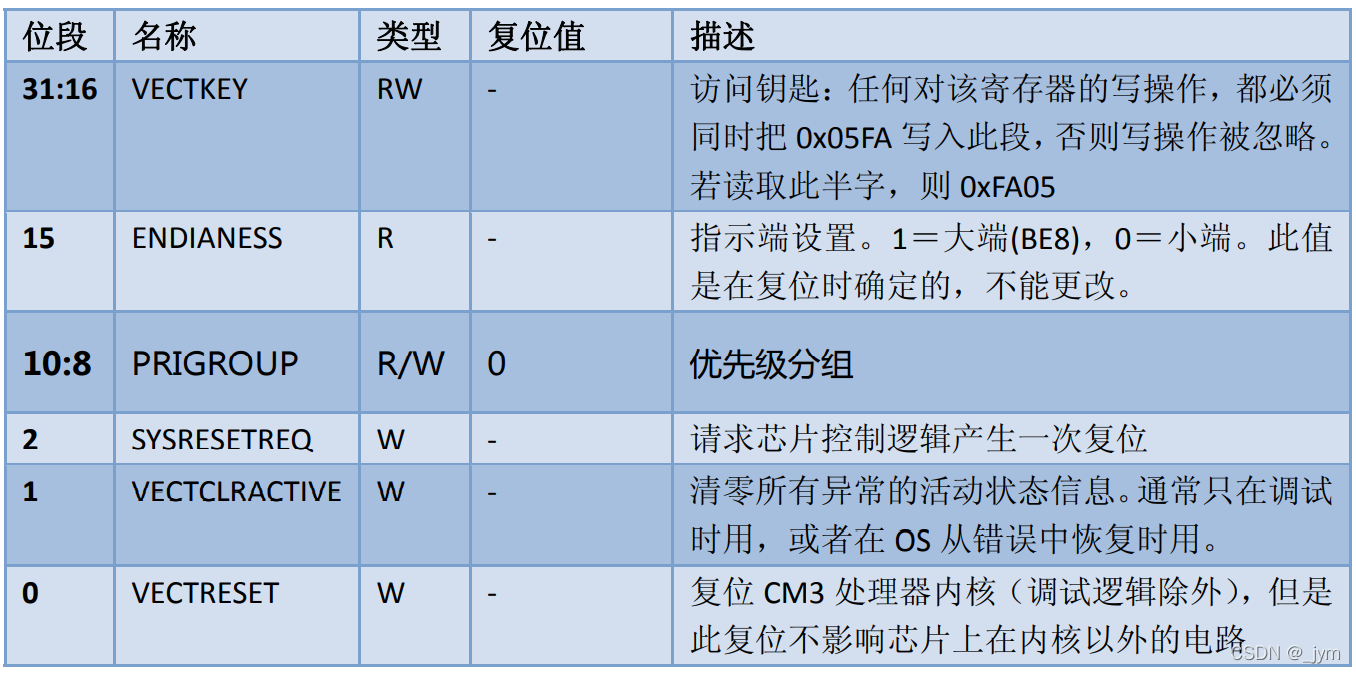
应用程序中断及复位控制寄存器(AIRCR)(地址:0xE000_ED00)如下。
中断的悬起与解悬:
中断发生时,正在处理同级或高优先级异常,或者被掩蔽,则中断不能立即得到响应。此时中断被悬起。
可以通过中断设置悬起寄存器(SETPEND)、中断悬起清除寄存器(CLRPEND)读取中断的悬起状态,还可以写它们来手工悬起中断。
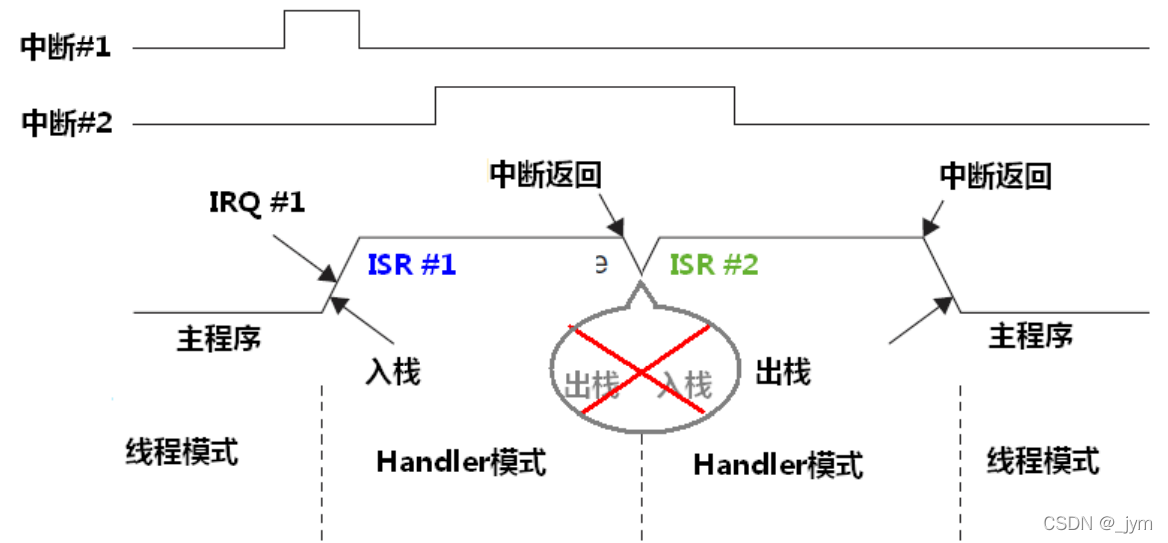
咬尾中断Tail‐Chaining:
处理器在响应某异常时,如果又发生其优先级高的异常,当前异常被阻塞,转而执行优先级高的异常。那么异常执行返回后,系统处理悬起的异常时,如果先POP再把POP出的再PUSH回去,这就是浪费CPU时间。
所以CM3不POP这些寄存器,而是继续使用上一个异常已经PUSH好的成果。如下图所示。
晚到的高优先级异常:
入栈的阶段,尚未执行其服务例程时,如果此时收到了高优先级异常的请求,入栈后,将执行高优先级异常的服务例程。如果高优先级异常来得太晚,以至于已经执行了前一个异常的指令,则按普通的抢占处理,这会需要更多的处理器时间和额外32字节的堆栈空间。高优先级异常执行完毕后,以咬尾中断方式执行之前被抢占的异常。
cortex-m里面开中断、关中断指令
临界段:一段在执行的时候不能被中断的代码段(必须完整运行、不能被打断的代码段)。一般是对全局变量操作时候,用到临界段。当一个任务在访问某个全局变量时,如果被其他中断打断,改变了该全局变量,再回到上个任务时,全局变量已经不是当时的它了,这种情况可能会导致不可意料的后果。
临界段被打断的情况:系统调度(最终也是产生PendSV中断);外部中断。
freertos进入临界段代码时需要关闭中断,处理完临界段代码再打开中断。
首先看下面的代码。
__asm void prvStartFirstTask( void )
{PRESERVE8/* 在Cortex-M中,0xE000ED08是SCB_VTOR这个寄存器的地址,里面存放的是向量表的起始地址,即MSP的地址 */ldr r0, =0xE000ED08ldr r0, [r0]ldr r0, [r0]/* 设置主堆栈指针msp的值 */msr msp, r0/* 使能全局中断 */cpsie icpsie fdsbisb/* 调用SVC去启动第一个任务 */svc 0 nopnop
}
__asm void vPortSVCHandler( void )
{extern pxCurrentTCB;PRESERVE8ldr r3, =pxCurrentTCB /* 加载pxCurrentTCB的地址到r3 */ldr r1, [r3] /* 加载pxCurrentTCB到r1 */ldr r0, [r1] /* 加载pxCurrentTCB指向的值到r0,目前r0的值等于第一个任务堆栈的栈顶 */ldmia r0!, {r4-r11} /* 以r0为基地址,将栈里面的内容加载到r4~r11寄存器,同时r0会递增 */msr psp, r0 /* 将r0的值,即任务的栈指针更新到psp */isbmov r0, #0 /* 设置r0的值为0 */msr basepri, r0 /* 设置basepri寄存器的值为0,即所有的中断都没有被屏蔽 */orr r14, #0xd bx r14
}
__asm void xPortPendSVHandler( void )
{extern pxCurrentTCB;extern vTaskSwitchContext;PRESERVE8/* 当进入PendSVC Handler时,上一个任务运行的环境即:xPSR,PC(任务入口地址),R14,R12,R3,R2,R1,R0(任务的形参)这些CPU寄存器的值会自动保存到任务的栈中,剩下的r4~r11需要手动保存 *//* 获取任务栈指针到r0 */mrs r0, pspisbldr r3, =pxCurrentTCB /* 加载pxCurrentTCB的地址到r3 */ldr r2, [r3] /* 加载pxCurrentTCB到r2 */stmdb r0!, {r4-r11} /* 将CPU寄存器r4~r11的值存储到r0指向的地址 */str r0, [r2] /* 将任务栈的新的栈顶指针存储到当前任务TCB的第一个成员,即栈顶指针 */ stmdb sp!, {r3, r14} /* 将R3和R14临时压入堆栈 */mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY /* 进入临界段 */msr basepri, r0dsbisbbl vTaskSwitchContext /* 调用函数vTaskSwitchContext,寻找新的任务运行,通过使变量pxCurrentTCB指向新的任务来实现任务切换 */ mov r0, #0 /* 退出临界段 */msr basepri, r0ldmia sp!, {r3, r14} /* 恢复r3和r14 */ldr r1, [r3]ldr r0, [r1] /* 当前激活的任务TCB第一项保存了任务堆栈的栈顶,现在栈顶值存入R0*/ldmia r0!, {r4-r11} /* 出栈 */msr psp, r0isbbx r14 nop
}上面这些代码,可以看到有下面这些指令。
cpsie i
cpsie f
msr basepri, r0
为了快速地开关中断,CM3 专门设置了 CPS 指令,有 4 种用法。
CPSID I ;PRIMASK=1, ;关中断
CPSIE I ;PRIMASK=0, ;开中断
CPSID F ;FAULTMASK=1, ;关异常
CPSIE F ;FAULTMASK=0 ;开异常
可以看到,上面指令还是控制的PRIMASK和FAULTMASK寄存器。
如下图所示,可以通过CPS 指令打开全局中断或者关闭全局中断。
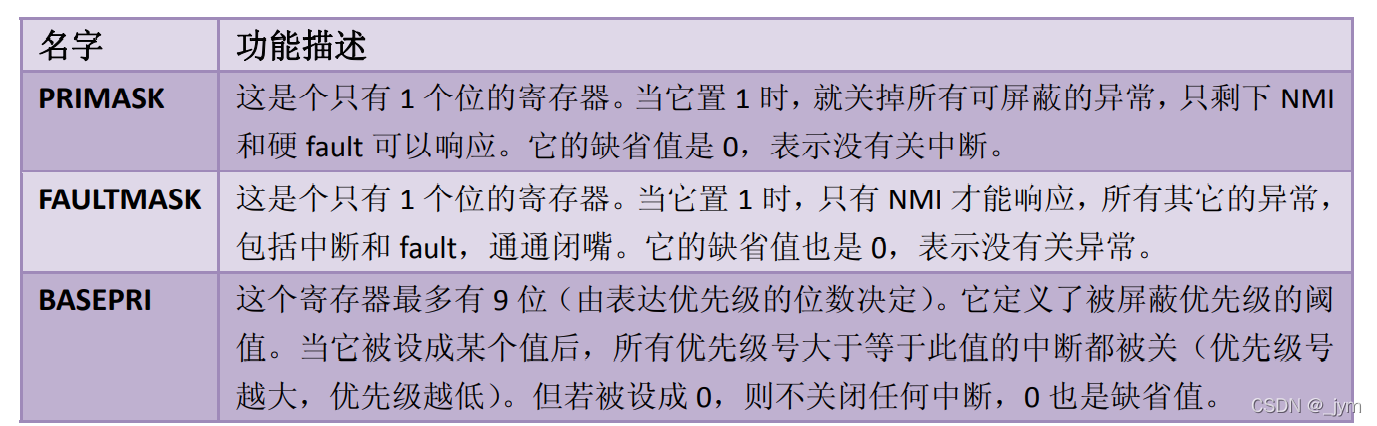
basepri是中断屏蔽寄存器,下面这个设置,优先级大于等于11的中断都将被屏蔽。相当于关中断进入临界段。
mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY
msr basepri, r0
/*
#define configMAX_SYSCALL_INTERRUPT_PRIORITY 191 /* 高四位有效,即等于0xb0,或者是11 */
191转成二进制就是11000000,高四位就是1100
*/
下面这个代码:优先级高于0的中断被屏蔽,相当于是开中断退出临界段。
mov r0, #0 /* 退出临界段 */
msr basepri, r0
关中断和开中断
下面这个代码,带返回值的意思是:往BASEPRI写入新的值的时候,先将BASEPRI的值保存起来,更新完BASEPRI的值的时候,将之前保存好的BASEPRI的值返回,返回的值作为形参传入开中断函数。
不带返回值的意思是:在往 BASEPRI 写入新的值的时候,不用先将 BASEPRI 的值保存起来, 不用管当前的中断状态是怎么样的,既然不用管当前的中断状态,也就意味着这样的函数不能在中断里面调用。
/*portmacro.h*//*不带返回值的关中断函数,不能嵌套,不能在中断中使用*/
#define portDISABLE_INTERRUPTS() vPortRaiseBASEPRI()
/*不带中断保护的开中断函数*/
#define portENABLE_INTERRUPTS() vPortSetBASEPRI( 0 )/*带返回值的关中断函数,可以嵌套,可以在中断里面使用*/
#define portSET_INTERRUPT_MASK_FROM_ISR() ulPortRaiseBASEPRI()
/*带中断保护的开中断函数*/
#define portCLEAR_INTERRUPT_MASK_FROM_ISR(x) vPortSetBASEPRI(x)#define configMAX_SYSCALL_INTERRUPT_PRIORITY 191 /* 高四位有效,即等于0xb0,或者是11 *//*不带返回值的关中断函数*/
static portFORCE_INLINE void vPortRaiseBASEPRI( void )
{
uint32_t ulNewBASEPRI = configMAX_SYSCALL_INTERRUPT_PRIORITY;__asm{/* Set BASEPRI to the max syscall priority to effect a criticalsection. */msr basepri, ulNewBASEPRIdsbisb}
}
/*带返回值的关中断函数*/
static portFORCE_INLINE uint32_t ulPortRaiseBASEPRI( void )
{
uint32_t ulReturn, ulNewBASEPRI = configMAX_SYSCALL_INTERRUPT_PRIORITY;__asm{/* Set BASEPRI to the max syscall priority to effect a criticalsection. */mrs ulReturn, baseprimsr basepri, ulNewBASEPRIdsbisb}return ulReturn;
}
/*不带中断保护的开中断函数和带中断保护的开中断函数,区别在于参数的值*/
static portFORCE_INLINE void vPortSetBASEPRI( uint32_t ulBASEPRI )
{__asm{/* Barrier instructions are not used as this function is only used tolower the BASEPRI value. */msr basepri, ulBASEPRI}
}
进入临界段和退出临界段
对于不带中断保护情况,vPortEnterCritical函数里面的uxCriticalNesting是一个全局变量,记录临界段嵌套次数,vPortExitCritical函数每次将uxCriticalNesting减一,只有当uxCriticalNesting = 0才会调用portENABLE_INTERRUPTS函数使能中断。这样的话,在有多个临界段代码的时候,不会因为某一个临界段代码的退出而打断其他临界段的保护,只有所有的临界段代码都退出后,才会使能中断。
带中断保护的,主要就是往BASEPRI写入新的值的时候,先将BASEPRI的值保存起来,更新完BASEPRI的值的时候,将之前保存好的BASEPRI的值返回,返回的值作为形参传入开中断函数。
/*进入临界段,不带中断保护*/
#define taskENTER_CRITICAL() portENTER_CRITICAL()
/*退出临界段,不带中断保护*/
#define taskEXIT_CRITICAL() portEXIT_CRITICAL()/*进入临界段,带中断保护,可以嵌套*/
#define taskENTER_CRITICAL_FROM_ISR() portSET_INTERRUPT_MASK_FROM_ISR()
/*退出临界段,带中断保护,可以嵌套*/
#define taskEXIT_CRITICAL_FROM_ISR( x ) portCLEAR_INTERRUPT_MASK_FROM_ISR( x )/*进入临界段,不带中断保护*/
#define portENTER_CRITICAL() vPortEnterCritical()
/*退出临界段,不带中断保护*/
#define portEXIT_CRITICAL() vPortExitCritical()/*进入临界段,带中断保护,可以嵌套*/
#define portSET_INTERRUPT_MASK_FROM_ISR() ulPortRaiseBASEPRI()
/*退出临界段,带中断保护,可以嵌套*/
#define portCLEAR_INTERRUPT_MASK_FROM_ISR(x) vPortSetBASEPRI(x)/*进入临界段,不带中断保护*/
void vPortEnterCritical( void )
{/*不带返回值的关中断函数,不能嵌套,不能在中断中使用*/portDISABLE_INTERRUPTS();uxCriticalNesting++;if( uxCriticalNesting == 1 ){configASSERT( ( portNVIC_INT_CTRL_REG & portVECTACTIVE_MASK ) == 0 );}
}
/*退出临界段,不带中断保护*/
void vPortExitCritical( void )
{configASSERT( uxCriticalNesting );uxCriticalNesting--;if( uxCriticalNesting == 0 ){/*不带中断保护的开中断函数*/portENABLE_INTERRUPTS();}
}/*进入临界段,带中断保护,可以嵌套*/
static portFORCE_INLINE uint32_t ulPortRaiseBASEPRI( void )
{
uint32_t ulReturn, ulNewBASEPRI = configMAX_SYSCALL_INTERRUPT_PRIORITY;__asm{/* Set BASEPRI to the max syscall priority to effect a criticalsection. */mrs ulReturn, baseprimsr basepri, ulNewBASEPRIdsbisb}return ulReturn;
}
/*退出临界段,带中断保护,可以嵌套*/
static portFORCE_INLINE void vPortSetBASEPRI( uint32_t ulBASEPRI )
{__asm{/* Barrier instructions are not used as this function is only used tolower the BASEPRI value. */msr basepri, ulBASEPRI}
}
/*临界段代码的应用场合*/
/* 在中断场合,临界段可以嵌套 */
{uint32_t ulReturn;/* 进入临界段,临界段可以嵌套 */ulReturn = taskENTER_CRITICAL_FROM_ISR();/* 临界段代码 *//* 退出临界段 */taskEXIT_CRITICAL_FROM_ISR( ulReturn );
}/* 在非中断场合,临界段不能嵌套 */
{/* 进入临界段 */taskENTER_CRITICAL();/* 临界段代码 *//* 退出临界段*/taskEXIT_CRITICAL();
}



















