
作者:朱松纯
来源:人工智能前沿讲习班
导读
本文作者:朱松纯,加州大学洛杉矶分校UCLA统计学和计算机科学教授,视觉、认知、学习与自主机器人中心主任。文章前四节浅显探讨什么是人工智能和当前所处的历史时期,后面六节分别探讨六个学科的重点研究问题和难点,有什么样的前沿的课题等待年轻人去探索,最后一节讨论人工智能是否以及如何成为一门成熟的科学体系。
目录
引言
第一节 现状:正视现实
第二节 未来:一只乌鸦给我们的启示
第三节 历史:从“春秋五霸”到“战国六雄”
第四节 统一:“小数据、大任务”范式与认知构架
第五节 学科一:计算视觉 --- 从“深”到“暗”
第六节 学科二:认知推理 --- 走进内心世界
第七节 学科三:语言通讯 --- 沟通的认知基础
第八节 学科四:博弈伦理 --- 获取、共享人类的价值观
第九节 学科五:机器人学 --- 构建大任务平台
第十节 学科六:机器学习 --- 学习的终极极限与“停机问题”
第十一节 总结:智能科学 --- 牛顿与达尔文的统一
附录 中科院自动化所报告会上的问答与互动摘录
鸣谢
引言
到底什么是人工智能?现在的研究处于什么阶段?今后如何发展?这是大家普遍关注的问题。由于人工智能涵盖的学科和技术面非常广,要在短时间内全面认识、理解人工智能,别说非专业人士,就算对本行业研究人员,也是十分困难的任务。
所以,现在很多宣传与决策冲到认识之前了,由此不可避免地造成一些思想和舆论的混乱。
全面认识人工智能之所以困难,是有客观原因的。
其一、人工智能是一个非常广泛的领域。当前人工智能涵盖很多大的学科,我把它们归纳为六个:
(1)计算机视觉(暂且把模式识别,图像处理等问题归入其中)、
(2)自然语言理解与交流(暂且把语音识别、合成归入其中,包括对话)、
(3)认知与推理(包含各种物理和社会常识)、
(4)机器人学(机械、控制、设计、运动规划、任务规划等)、
(5)博弈与伦理(多代理人agents的交互、对抗与合作,机器人与社会融合等议题)、
(6)机器学习(各种统计的建模、分析工具和计算的方法),
这些领域目前还比较散,目前它们正在交叉发展,走向统一的过程中。我把它们通俗称作“战国六雄”,中国历史本来是“战国七雄”,我这里为了省事,把两个小一点的领域:博弈与伦理合并了,伦理本身就是博弈的种种平衡态。最终目标是希望形成一个完整的科学体系,从目前闹哄哄的工程实践变成一门真正的科学Science of Intelligence。
各个领域的研究人员看人工智能,如果按照印度人的谚语可以叫做“盲人摸象”,但这显然是言语冒犯了,还是中国的文豪苏轼游庐山时说得有水准:
“横看成岭侧成峰,远近高低各不同。
不识庐山真面目,只缘身在此山中。”
其二,人工智能发展的断代现象。由于历史发展的原因,人工智能自1980年代以来,被分化出以上几大学科,相互独立发展,而且这些学科基本抛弃了之前30年以逻辑推理与启发式搜索为主的研究方法,取而代之的是概率统计(建模、学习)的方法。留在传统人工智能领域(逻辑推理、搜索博弈、专家系统等)而没有分流到以上分支学科的老一辈中,的确是有很多全局视野的,但多数已经过世或退休了。
这种领域的分化与历史的断代, 客观上造成了目前的学界和产业界思路和观点相当“混乱”的局面,媒体上的混乱就更放大了。但是,以积极的态度来看,这个局面确实为现在的年轻一代研究人员、研究生提供了一个很好的建功立业的机会和广阔的舞台。
我写这篇文章的动机在于三点:
(1)为在读的研究生们、为有志进入人工智能研究领域的年轻学者开阔视野。
(2)为那些对人工智能感兴趣、喜欢思考的人们,做一个前沿的、综述性的介绍。
(3)为公众与媒体从业人员,做一个人工智能科普,澄清一些事实。
诚如屈子所言:“路漫漫其修远兮,吾将上下而求索”。
第一节 现状评估:正视现实
人工智能的研究,简单来说,就是要通过智能的机器,延伸和增强(augment)人类在改造自然、治理社会的各项任务中的能力和效率,最终实现一个人与机器和谐共生共存的社会。
抛开科幻的空想,谈几个近期具体的应用。无人驾驶大家听了很多,先说说军用。军队里的一个班或者行动组,现在比如要七个人,将来可以减到五个人,另外两个用机器来替换。其次,机器人可以用在救灾和一些危险的场景,如核泄露现场,人不能进去,必须靠机器人。医用的例子很多:智能的假肢或外骨架(exoskeleton)与人脑和身体信号对接,增强人的行动控制能力,帮助残疾人更好生活。此外,还有就是家庭养老等服务机器人等。

但是,这方面的进展很不尽人意。以前日本常常炫耀他们机器人能跳舞,中国有一次春节晚会也拿来表演了。那都是事先编写的程序,结果一个福岛核辐射事故一下子把所有问题都暴露了,发现他们的机器人一点招都没有。美国也派了机器人过去,同样出了很多问题。比如一个简单的技术问题,机器人进到灾难现场,背后拖一根长长的电缆,要供电和传数据,结果电缆就被缠住了,动弹不得。
看到这里,有人要问了,教授说得不对,我们明明在网上看到美国机器人让人叹为观止的表现。比如,这一家波士顿动力学公司(Boston Dynamics)的演示,它们的机器人,怎么踢都踢不倒呢,或者踢倒了可以自己爬起来,而且在野外丛林箭步如飞呢,还有几个负重的电驴、大狗也很酷。这家公司本来是由美国国防部支持开发出机器人来的,被谷歌收购之后、就不再承接国防项目。可是,谷歌发现除了烧钱,目前还找不到商业出路,最近一直待售之中。您会问,那谷歌不是很牛吗?DeepMind下围棋不是也一次次刺激中国人的神经吗?有一个逆天的机器人身体、一个逆天的机器人大脑,它们都在同一个公司内部,那为什么没有做出一个人工智能的产品呢?他们何尝不在夜以继日的奋战之中啊。

人工智能炒作了这么长时间,您看看周围环境,您看到机器人走到大街上了?没有。您看到人工智能进入家庭了吗?其实还没有。您可能唯一直接领教过的是基于大数据和深度学习训练出来的聊天机器人,你可能跟Ta聊过。用我老家湖北人的话,这就叫做“扯白”--- 东扯西拉、说白话。如果你没有被Ta气得背过气的话,要么您真的是闲得慌,要么是您真的有耐性。

为了测试技术现状,美国国防部高级研究署2015年在洛杉矶郊区Pomona做了一个DARPA Robot Challenge(DRC),悬赏了两百万美金奖给竞赛的第一名。有很多队伍参加了这个竞赛,上图是韩国科技大学队赢了第一名,右边是他们的机器人在现场开门进去“救灾”。
后来发现内情,原来机器人所有的动作基本上是人在遥控的。每一步、每一个场景分别有一个界面,每个学生控制一个模块。感知、认知、动作都是人在指挥。就是说这个机器人其实并没有自己的感知、认知、思维推理、规划的能力。
这还是一个简单的场景。其一、整个场景都是事先设定的,各个团队也都反复操练过的。如果是没有遇见的场景,需要灵机决断呢?其二、整个场景还没有人出现,如果有其他人出现,需要社会活动(如语言交流、分工协作)的话,那复杂度就又要上两个数量级了。

其实,要是完全由人手动控制,现在的机器人都可以做手术了,而且手术机器人已经在普及之中。上图是我实验室与一家公司合作的项目,机器人可以开拉链、检查包裹、用钳子撤除炸弹等,都是可以实现的。
小结一下,现在的人工智能和机器人,关键问题是缺乏物理的常识和社会的常识“Common sense”。 这是人工智能研究最大的障碍。那么什么是常识?常识就是我们在这个世界和社会生存的最基本的知识:(1)它使用频率最高;(2)它可以举一反三,推导出并且帮助获取其它知识。这是解决人工智能研究的一个核心课题。我自2010年来,一直在带领一个跨学科团队,攻关视觉常识的获取与推理问题。我在自动化所做了另外一个关于视觉常识报告,也被转录成中文了,不久会发表出来。
那么是不是说,我们离真正的人工智能还很遥远呢?其实也不然。关键是研究的思路要找对问题和方向。自然界已经为我们提供了很好的案例。
下面,我就来看一下,自然界给我们展示的解答。
第二节 未来目标: 一只乌鸦给我们的启示
同属自然界的鸟类,我们对比一下体型大小都差不多的乌鸦和鹦鹉。鹦鹉有很强的语言模仿能力,你说一个短句,多说几遍,它能重复,这就类似于当前的由数据驱动的聊天机器人。二者都可以说话,但鹦鹉和聊天机器人都不明白说话的语境和语义,也就是它们不能把说的话对应到物理世界和社会的物体、场景、人物,不符合因果与逻辑。
可是,乌鸦就远比鹦鹉聪明,它们能够制造工具,懂得各种物理的常识和人的活动的社会常识。
下面,我就介绍一只乌鸦,它生活在复杂的城市环境中,与人类交互和共存。YouTube网上有不少这方面的视频,大家可以找来看看。我个人认为,人工智能研究该搞一个“乌鸦图腾”, 因为我们必须认真向它们学习。
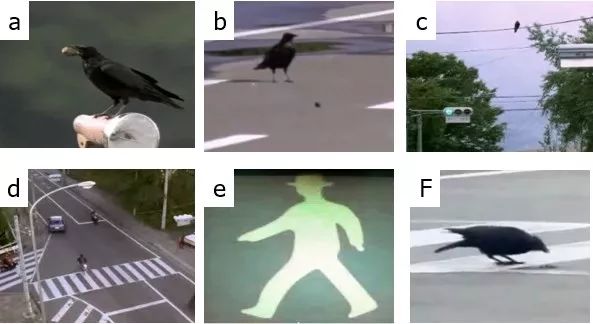
上图a是一只乌鸦,被研究人员在日本发现和跟踪拍摄的。乌鸦是野生的,也就是说,没人管,没人教。它必须靠自己的观察、感知、认知、学习、推理、执行,完全自主生活。假如把它看成机器人的话,它就在我们现实生活中活下来。如果这是一个自主的流浪汉进城了,他要在城里活下去,包括与城管周旋。
首先,乌鸦面临一个任务,就是寻找食物。它找到了坚果(至于如何发现坚果里面有果肉,那是另外一个例子了),需要砸碎,可是这个任务超出它的物理动作的能力。其它动物,如大猩猩会使用工具,找几块石头,一块大的垫在底下,一块中等的拿在手上来砸。乌鸦怎么试都不行,它把坚果从天上往下抛,发现解决不了这个任务。在这个过程中,它就发现一个诀窍,把果子放到路上让车轧过去(图b),这就是“鸟机交互”了。后来进一步发现,虽然坚果被轧碎了,但它到路中间去吃是一件很危险的事。因为在一个车水马龙的路面上,随时它就牺牲了。我这里要强调一点,这个过程是没有大数据训练的,也没有所谓监督学习,乌鸦的生命没有第二次机会。这是与当前很多机器学习,特别是深度学习完全不同的机制。
然后,它又开始观察了,见图c。它发现在靠近红绿路灯的路口,车子和人有时候停下了。这时,它必须进一步领悟出红绿灯、斑马线、行人指示灯、车子停、人流停这之间复杂的因果链。甚至,哪个灯在哪个方向管用、对什么对象管用。搞清楚之后,乌鸦就选择了一根正好在斑马线上方的一根电线,蹲下来了(图d)。这里我要强调另一点,也许它观察和学习的是别的地点,那个点没有这些蹲点的条件。它必须相信,同样的因果关系,可以搬到当前的地点来用。这一点,当前很多机器学习方法是做不到的。比如,一些增强学习方法,让机器人抓取一些固定物体,如积木玩具,换一换位置都不行;打游戏的人工智能算法,换一换画面,又得重新开始学习。
它把坚果抛到斑马线上,等车子轧过去,然后等到行人灯亮了(图e)。这个时候,车子都停在斑马线外面,它终于可以从容不迫地走过去,吃到了地上的果肉。你说这个乌鸦有多聪明,这是我期望的真正的智能。
这个乌鸦给我们的启示,至少有三点:
其一、它是一个完全自主的智能。感知、认知、推理、学习、和执行, 它都有。我们前面说的, 世界上一批顶级的科学家都解决不了的问题,乌鸦向我们证明了,这个解存在。
其二、你说它有大数据学习吗?这个乌鸦有几百万人工标注好的训练数据给它学习吗?没有,它自己把这个事通过少量数据想清楚了,没人教它。
其三、乌鸦头有多大?不到人脑的1%大小。 人脑功耗大约是10-25瓦,它就只有0.1-0.2瓦,就实现功能了,根本不需要前面谈到的核动力发电。 这给硬件芯片设计者也提出了挑战和思路。十几年前我到中科院计算所讲座, 就说要做视觉芯片VPU,应该比后来的GPU更超前。我最近参与了一个计算机体系结构的大项目,也有这个目标。
讲通俗一点,我们要寻找“乌鸦”模式的智能,而不要“鹦鹉”模式的智能。当然,我们必须也要看到,“鹦鹉”模式的智能在商业上,针对某些垂直应用或许有效。
第三节 历史时期:从“春秋五霸”到“战国六雄”
要搞清楚人工智能的发展趋势,首先得回顾历史。读不懂历史,无法预测未来。这一节,我就结合自己的经历谈一下我的观点,不见得准确和全面。
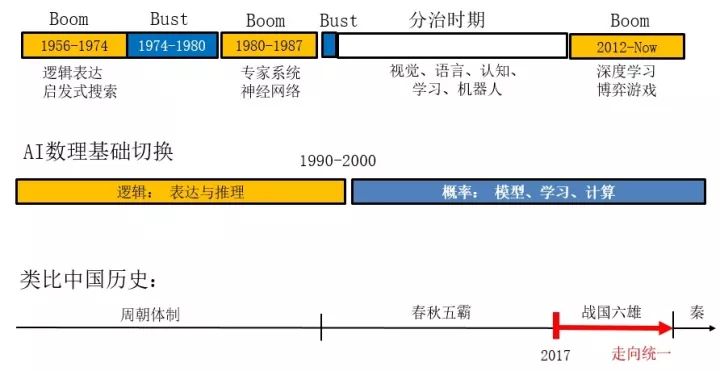
首先,从表面一层来看。反映在一些产业新闻和社会新闻层面上,人工智能经过了几起几落,英文叫做Boom and Bust,意思是一哄而上、一哄而散,很形象。每次兴盛期都有不同的技术在里面起作用。
1980年代初又兴起了第二次热潮,一批吹牛的教授、研究人员登场了。做专家系统、知识工程、医疗诊断等,中国当时也有人想做中医等系统。虽然这次其中也有学者拿了图灵奖,但这些研究没有很好的理论根基。1986年我上了中国科大计算机系,我对计算机专业本身不是最感兴趣,觉得那就是一个工具和技能,而人工智能方向水很深,值得长期探索,所以我很早就去选修了人工智能的研究生课程,是由自动化系一个到美国进修的老师回来开的课。
第三次热潮就是最近两年兴起的深度学习推动的。有了以前的教训,一开始学者们都很谨慎,出来警告说我们做的是特定任务,不是通用人工智能,大家不要炒作。但是,拦不住了。公司要做宣传,然后,大家开始加码宣传。这就像踩踏事件,处在前面的人是清醒的,他们叫停,可是后面大量闻信赶来的人不知情,拼命往里面挤。人工智能的确是太重要了,谁都不想误了这趟车。也有人认为这次是真的,不会再有冬天了。冬天不冬天,那就要看我们现在怎么做了。
所以说,从我读大学开始,人工智能这个名词从公众视线就消失了近30年。我现在回头看,其实它当时并没有消失,而是分化了。研究人员分别聚集到五个大的领域或者叫做学科:计算机视觉、自然语言理解、认知科学、机器学习、机器人学。这些领域形成了自己的学术圈子、国际会议、国际期刊,各搞各的,独立发展。人工智能里面还有一些做博弈下棋、常识推理,还留在里面继续搞,但人数不多。我把这30年叫做一个“分治时期”,相当于中国历史的“春秋时期”。春秋五霸就相当于这分出去的五个学科,大家各自发展壮大。
其次、从深一层的理论基础看。我把人工智能发展的60年分为两个阶段。
第一阶段:前30年以数理逻辑的表达与推理为主。这里面有一些杰出的代表人物,如John McCarthy、Marvin Minsky、Herbert Simmon。他们懂很多认知科学的东西,有很强的全局观念。这些都是我读大学的时候仰慕的人物,他们拿过图灵奖和其它一堆大奖。但是,他们的工具基本都是基于数理逻辑和推理。
这个逻辑表达的“体制”,就相当于中国的周朝,周文王建立了一个相对松散的诸侯部落体制,后来指挥不灵,就瓦解了,进入一个春秋五霸时期。而人工智能正好也分出了五大领域。
第二阶段:后30年以概率统计的建模、学习和计算为主。在10余年的发展之后,“春秋五霸”在1990年中期都开始找到了概率统计这个新“体制”:统计建模、机器学习、随机计算算法等。
在这个体制的转型过程中,起到核心作用的有这么几个人。讲得通俗一点,他们属于先知先觉者,提前看到了人工智能的发展趋势,押对了方向(就相当于80年代买了微软、英特尔股票;90年代末,押对了中国房地产的那一批人)。他们没有进入中国媒体的宣传视野。我简要介绍一下,从中我们也可以学习到一些治学之道。
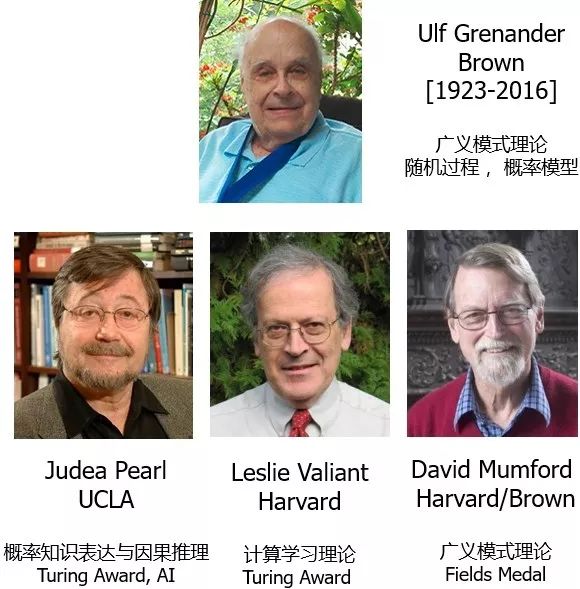
第一个人叫Ulf Grenander。他从60年代就开始做随机过程和概率模型,是最早的先驱。60年代属于百家争鸣的时期,当别的领军人物都在谈逻辑、神经网络的时候,他开始做概率模型和计算,建立了广义模式理论,试图给自然界各种模式建立一套统一的数理模型。
第二个人是Judea Pearl。他是我在UCLA的同事,原来是做启发式搜索算法的。80年代提出贝叶斯网络把概率知识表达于认知推理,并估计推理的不确定性。到90年代末,他进一步研究因果推理,这又一次领先于时代。2011年因为这些贡献他拿了图灵奖。他是一个知识渊博、思维活跃的人,不断有原创思想。
第三个人是Leslei Valiant。他因离散数学、计算机算法、分布式体系结构方面的大量贡献,2010年拿了图灵奖。1984年,他发表了一篇文章,开创了computational learning theory。他问了两个很简单、但是深刻的问题。第一个问题:你到底要多少例子、数据才能近似地、以某种置信度学到某个概念,就是PAClearning;第二个问题:如果两个弱分类器综合在一起,能否提高性能?如果能,那么不断加弱分类器,就可以收敛到强分类器。
第四个人是David Mumford。我把他放在这里,有点私心,因为他是我博士导师。他说他60年代初本来对人工智能感兴趣。因为他数学能力特别强,上代数几何课程的时候就发现能够证明大定理了,结果一路不可收拾,拿了菲尔茨奖。但是,到了80年代中期,他不忘初心,还是决定转回到人工智能方向来,从计算机视觉和计算神经科学入手。
这个时期,还有一个重要的人物是做神经网络和深度学习的多伦多大学教授Hinton。我上大学的时候,80年代后期那一次神经网络热潮,他就出名了。他很有思想,也很坚持,是个学者型的人物。所不同的是,他下面的团队有点像摇滚歌手,能凭着一首通俗歌曲(代码),迅速红遍大江南北。
所以,我跟那些计算机视觉的研究生和年轻人说,你们不要单纯在视觉这里做,你赶紧出去“抢地盘”,单独做视觉,已经没有多少新东西可做的了,性能调不过公司的人是一方面;更麻烦的是,别的领域的人打进来,把你的地盘给占了。这是必然发生的事情,现在正在发生的事情。
我的判断是,我们刚刚进入一个“战国时期”,以后就要把这些领域统一起来。首先我们必须深入理解计算机视觉、自然语言、机器人等领域,这里面有很丰富的内容和语意。如果您不懂这些问题domain的内涵,仅仅是做机器学习就称作人工智能专家,恐怕说不过去。
我们正在进入这么一个大集成的、大变革的时代,有很多机会让我们去探索前沿,不要辜负了这个时代。这是我演讲的第一个部分:人工智能的历史、现状,发展的大趋势。
下面,进入我今天演讲的第二个主题:用一个什么样的构架把这些领域和问题统一起来。我不敢说我有答案,只是给大家提出一些问题、例子和思路,供大家思考。不要指望我给你提供代码,下载回去,调调参数就能发文章。
第四节 人工智能研究的认知构架:小数据、大任务范式
智能是一种现象,表现在个体和社会群体的行为过程中。回到前面乌鸦的例子,我认为智能系统的根源可以追溯到两个基本前提条件:
一、物理环境客观的现实与因果链条。这是外部物理环境给乌鸦提供的、生活的边界条件。在不同的环境条件下,智能的形式会是不一样的。任何智能的机器必须理解物理世界及其因果链条,适应这个世界。
二、智能物种与生俱来的任务与价值链条。这个任务是一个生物进化的“刚需”。如个体的生存,要解决吃饭和安全问题,而物种的传承需要交配和社会活动。这些基本任务会衍生出大量的其它的“任务”。动物的行为都是被各种任务驱动的。
有了这个先天的基本条件(设计)后,下一个重要问题:是什么驱动了模型在空间中的运动,也就是学习的过程?还是两点:
一、 外来的数据。外部世界通过各种感知信号,传递到人脑,塑造我们的模型。数据来源于观察(observation)和实践(experimentation)。观察的数据一般用于学习各种统计模型,这种模型就是某种时间和空间的联合分布,也就是统计的关联与相关性。实践的数据用于学习各种因果模型,将行为与结果联系在一起。因果与统计相关是不同的概念。
二、内在的任务。这就是由内在的价值函数驱动的行为、以期达到某种目的。我们的价值函数是在生物进化过程中形成的。因为任务的不同,我们往往对环境中有些变量非常敏感,而对其它一些变量不关心。由此,形成不同的模型。
机器人的脑、人脑都可以看成一个模型。任何一个模型由数据与任务来共同塑造。
现在,我们就来到一个很关键的地方。同样是在概率统计的框架下,当前的很多深度学习方法,属于一个被我称作“大数据、小任务范式(big data for small task)”。针对某个特定的任务,如人脸识别和物体识别,设计一个简单的价值函数Loss function,用大量数据训练特定的模型。这种方法在某些问题上也很有效。
第五节 计算机视觉:从“深”到“暗” Dark, Beyond Deep
视觉是人脑最主要的信息来源,也是进入人工智能这个殿堂的大门。我自己的研究也正是从这里入手的。这一节以一个具体例子来介绍视觉里面的问题。当然,很多问题远远没有被解决。

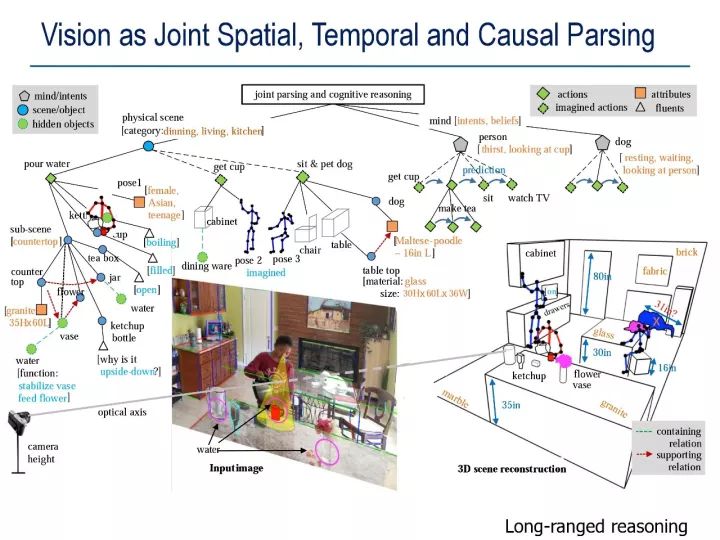
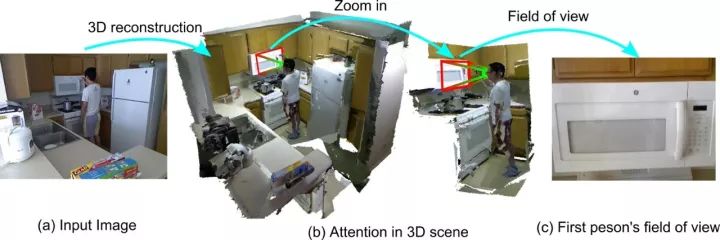
这是我家厨房的一个视角。多年前的一个下午,我女儿放学回家,我正在写一个大的项目申请书,就拍了这一张作为例子。图像就是一个像素的二维矩阵,可是我们感知到非常丰富的三维场景、行为的信息;你看的时间越长,理解的也越多。下面我列举几个被主流(指大多数研究人员)忽视的、但是很关键的研究问题。
一、几何常识推理与三维场景构建。以前计算机视觉的研究,需要通过多张图像(多视角)之间特征点的对应关系,去计算这些点在三维世界坐标系的位置(SfM、SLAM)。
见下图所示,在这个三维场景中,我们的理解就可以表达成为一个层次分解(compositional)的时空因果的解译图(Spatial,Temporal and Causal Parse Graph),简称 STC-PG。STC-PG是一个极其重要的概念,我下面会逐步介绍。
几何重建的一个很重要的背景是,我们往往不需要追求十分精确的深度位置。比如,人对三维的感知其实都是非常不准的,它的精确度取决于你当前要执行的任务。在执行的过程中,你不断地根据需要来提高精度。比如,你要去拿几米以外的一个杯子,一开始你对杯子的方位只是一个大致的估计,在你走近、伸手的过程中逐步调整精度。
二、场景识别的本质是功能推理。现在很多学者做场景的分类和分割都是用一些图像特征,用大量的图片例子和手工标注的结果去训练神经网络模型 --- 这是典型的“鹦鹉”模式。而一个场景的定义本质上就是功能。当你看到一个三维空间之后,人脑很快就可以想象我可以干什么:这个地方倒水,这里可以拿杯子,这里可以坐着看电视等。现代的设计往往是复合的空间,就是一个房间可以多种功能,所以简单去分类已经不合适了。

有了这个理解,我们就知道:下面两张图,虽然图像特征完全不同,但是他们是同一类场景,功能上是等价的。人的活动和行为,不管你是哪个国家、哪个历史时期,基本是不变的。这是智能泛化的基础,也就是把你放到一个新的地区,你不需要大数据训练,马上就能理解、适应。这是我们能够举一反三的一个基础。

回到前面的那个STC-PG解译图,每个场景底下其实就分解成为一些动作和功能 (见STC-PG图中的绿色方片节点)。由计算机想象、推理的各种功能决定对场景的分类。 想象功能就是把人的各种姿态放到三维场景中去拟合(见厨房解译图中人体线画)。这是完全不同于当前的深度学习方法用的分类方法。
三、物理稳定性与关系的推理。我们的生活空间除了满足人类的各种需求(功能、任务)之外, 另一个基本约束就是物理。我们对图像的解释和理解被表达成为一个解译图,这个解译图必须满足物理规律,否则就是错误的。
我们对图像的理解包含了物体之间的物理关系,每个物体的支撑点在那里。比如,下面这个图,吊灯和墙上挂的东西,如果没有支撑点,就会掉下来(右图)。这个研究方向,MIT认知科学系的Josh Tenenbuam教授与我都做了多年。

我提出了一个新的场景理解的minimax标准:minimize instability and maximize functionality最小化不稳定性且最大化功能性。这比以前我们做图像理解的用的MDL(最小描述长度)标准要更靠谱。这是解决计算机视觉的基本原理,功能和物理是设计场景的基本原则。几何尺寸是附属于功能推出来的,比如椅子的高度就是因为你要坐得舒服,所以就是你小腿的长度。
四、意向、注意和预测。厨房那张图有一个人和一只狗,我们可以进一步识别其动作、眼睛注视的地方,由此推导其动机和意向。这样我们可以计算她在干什么、想干什么,比如说她现在是渴了,还是累了。通过时间累积之后,进而知道她知道哪些,也就是她看到了或者没有看到什么。在时间上做预测,她下面想干什么。只有把这些都计算出来了,机器才能更好地与人进行交互。
下面的这一张图,是多摄像机的一个综合场景的解译实例。这是我的实验室做出来的一个视觉系统。这个视频的理解就输出为一个大的综合的STC-PG。在此基础上,就可以输出文字的描述(I2T)和回答提问 QA。我们把它叫做视觉图灵测试,网址:visualturingtest.com。
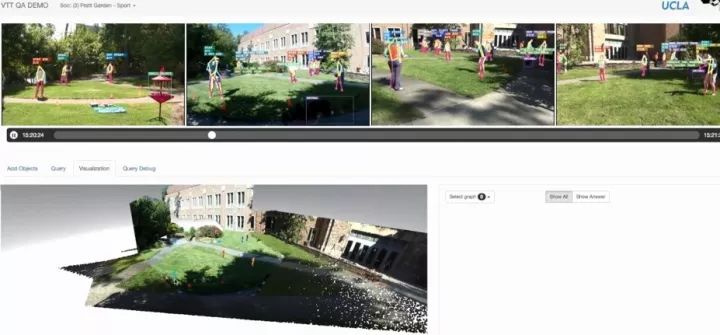
与第一节讲的机器人竞赛类似,这也是一个DARPA项目。测试就是用大量视频,我们算出场景和人的三维的模型、动作、属性、关系等等,然后就来回答各种各样的1000多个问题。现在一帮计算机视觉的人研究VQA(视觉问答),就是拿大量的图像和文本一起训练,这是典型的“鹦鹉”系统,基本都是“扯白”。
五、任务驱动的因果推理与学习。前面我谈了场景的理解的例子,下面我谈一下物体的识别和理解,以及为什么我们不需要大数据的学习模式,而是靠举一反三的能力。
我们人是非常功利的社会动物,就是说做什么事情都是被任务所驱动的。这一点,2000年前的司马迁就已经远在西方功利哲学之前看到了( 《史记》 “货殖列传” ):
“天下熙熙,皆为利来;天下攘攘,皆为利往。”
那么,人也就带着功利的目的来看待这个世界,这叫做“teleological stance”。这个物体是用来干什么的?它对我有什么用?怎么用?
当然,有没有用是相对于我们手头的任务来决定的。很多东西,当你用不上的时候,往往视而不见;一旦要急用,你就会当个宝。俗话叫做“势利眼”,没办法,这是人性!你今天干什么、明天干什么,每时每刻都有任务。俗话又叫做“屁股决定脑袋”,一个官员坐在不同位置,他就有不同的任务与思路,位置一调,马上就“物是人非”了。
我们的知识是根据我们的任务来组织的。那么什么叫做任务呢?如何表达成数学描述呢?
每个任务其实是在改变场景中的某些物体的状态。牛顿发明了一个词,在这里被借用了:叫做fluent。这个词还没被翻译到中文,就是一种可以改变的状态,我暂且翻译为“流态”吧。比如,把水烧开,水温就是一个流态;番茄酱与瓶子的空间位置关系是一个流态,可以被挤出来;还有一些流态是人的生物状态,比如饿、累、喜悦、悲痛;或者社会关系:从一般人,到朋友、再到密友等。人类和动物忙忙碌碌,都是在改变各种流态,以提高我们的价值函数(利益)。
懂得这一点,我们再来谈理解图像中的三维场景和人的动作。其实,这就是因果关系的推理。所谓因果就是:人的动作导致了某种流态的改变。
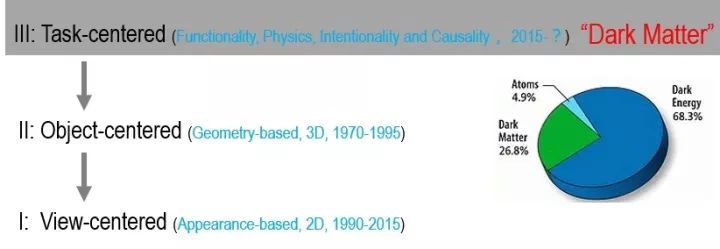
我把这些图像之外的东西统称为“暗物质”--- Dark Matter。物理学家认为我们可观察的物质和能量只是占宇宙总体的5%,剩下的95%是观察不到的暗物质和暗能量。视觉与此十分相似:感知的图像往往只占5%,提供一些蛛丝马迹;而后面的95%,包括功能、物理、因果、动机等等是要靠人的想象和推理过程来完成的。
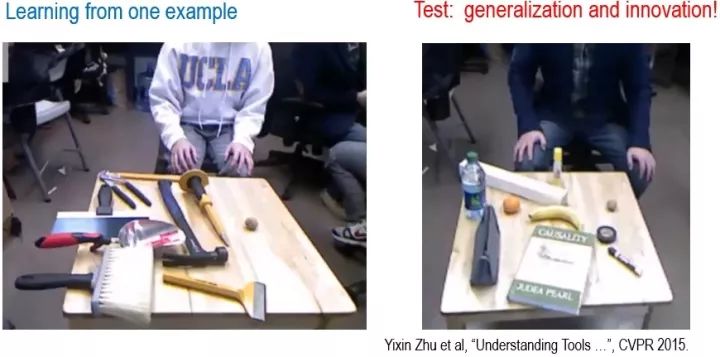
有了这个认识,我们来看一个例子(见下图左)。这个例子来自我们CVPR2015年发的paper,主要作者是朱毅鑫,这也是我很喜欢的一个工作。一个人要完成的任务是砸核桃,改变桌子上那个核桃的流态。把这个任务交给UCLA一个学生,他从桌面上的工具里面选择了一个锤子,整个过程没有任何过人之处,因为你也会这么做。
我再强调几点:
一、这个STC-PG的表达是你想象出来的。这个理解的过程是在你动手之前就想好了的,它里面的节点和边大多数在图像中是没有的,也就是我称作的“暗物质”。
二、这个计算的过程中,大量的运算属于“top-down”自顶向下的计算过程。也就是用你脑皮层里面学习到的大量的知识来解释你看到的“蛛丝马迹”,形成一个合理的解。而这种Top-down的计算过程在目前的深度多层神经网络中是没有的。
三、学习这个任务只需要极少的几个例子。如果一个人要太多的例子,说明Ta脑袋“不开窍”,智商不够。顺便说一句,我在UCLA讲课,期末学生会给老师评估教学质量。一个常见的学生意见就是朱教授给的例子太少了。
那么STC-PG是如何推导出来的呢?它的母板是一个STC-AOG,AOG就是And-Or Graph与或图。这个与或图是一个复杂的概率语法图模型,它可以导出巨量的合乎规则的概率事件,每一个事件就是STC-PG。这个表达与语言、认知、机器人等领域是一致的。在我看来,这个STC-AOG是一个统一表达,它与逻辑以及DNN可以打通关节。这里就不多讲了。
接着砸核桃的例子讲,还是朱毅鑫那篇文章的实验,这个实验很难做。比如现在的一个任务是“铲土”,我给你一个例子什么叫铲土,然后开始测试这个智能算法(机器人)的泛化能力。见下图。
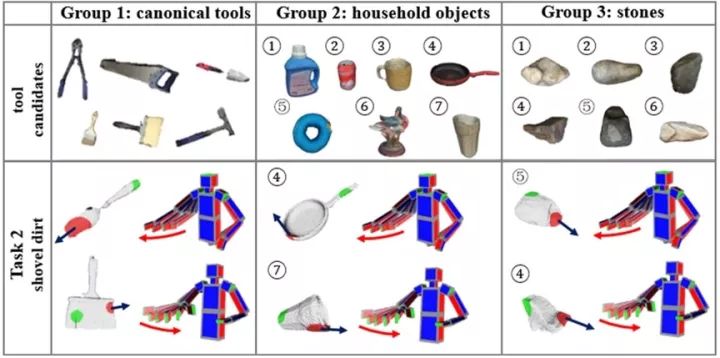
第一组实验(图左)。我给你一些工具,让你铲土,机器人第一选择挑了这个铲子,这个不是模式识别,它同时输出用这个铲子的动作、速度;输出铲子柄的绿色地方表示它要手握的地方,这个红的表示它用来铲土的位置。第二选择是一把刷子。
第二组实验(图中)。假如我要把这些工具拿走,你现在用一些家里常见的物体,任务还是铲土。它的第一选择是锅,第二选择是杯子。二者的确都是最佳选择。这是计算机视觉做出来的,自动的。
第三组实验(图右)。假如我们回到石器时代,一堆石头能干什么事情?所以我经常说,咱们石器时代的祖先,比现在的小孩聪明。因为他们能够理解这个世界的本质,现在,工具和物体越来越特定了,一个工具做一个任务,人都变成越来越傻了。视觉认知就退化成模式识别的问题了:从原来工具的理解变成一个模式识别。也就是由乌鸦变鹦鹉了。
我的一个理念是:计算机视觉要继续发展,必须发掘这些“dark matter”。把图像中想象的95%的暗物质与图像中可见的5%的蛛丝马迹,结合起来思考,才能到达真正的理解。
视觉研究的未来,我用一句话来说:Go Dark, Beyond Deep --- 发掘暗,超越深。
这样一来,视觉就跟认知和语言接轨了。
第六节 认知推理:走进内心世界
上一节讲到的智能的暗物质,已经属于感知与认知的结合了。再往里面走一步,就进入人与动物的内心世界Mind, 内心世界反映外部世界,同时受到动机任务的影响和扭曲。研究内涵包括:
Ta看到什么了?知道什么了?什么时候知道的?这其实是对视觉的历史时间求积分。
Ta现在在关注什么?这是当前的正在执行的任务。
Ta的意图是什么?后面想干什么?预判未来的目的和动机。
Ta喜欢什么?有什么价值函数?这在第九节会谈到具体例子。
自从人工智能一开始,研究者就提出这些问题,代表人物是Minsky:society of minds,心理学研究叫做Theory of minds。到2006年的时候,MIT认知科学系的Saxe与Kanwisher(她是我一个项目合作者)发现人的大脑皮层有一个专门的区,用于感受、推理到别人的想法:我知道你在想什么、干什么。这是人工智能的重要部分。
现实生活中,一般非隐私性的活动中,我们是不设防的,也就是“君子坦荡荡”。

不光是人有这个侦察与反侦察的能力,动物也有(见上图)。比如说这个鸟(图左),它藏果子的时候,会查看周围是否有其它鸟或者动物在那里看到它;如果有,它就不藏,它非要找到没人看它的时候和地方藏。这就是它在观察你,知道你知道什么。图中是一个狐狸和水獭对峙的视频。水獭抓到鱼了以后,发现这个狐狸在岸上盯着它呢,它知道这个狐狸想抢它嘴里叼着的鱼。水獭就想办法把鱼藏起来,它把这个鱼藏到水底下,然后这个狐狸去找。这说明了动物之间互相知道对方在想什么。
尽管人工智能和认知科学,以及最近机器人领域的人都对这个问题感兴趣,但是,大家以前还都是嘴上、纸上谈兵,用的是一些toy examples作为例子来分析。要做真实世界的研究,就需要从计算机视觉入手。计算机视觉里面的人呢,又大部分都在忙着刷榜,一时半会还没意思到这是个问题。我的实验室就捷足先登,做了一些初步的探索,目前还在积极推进之中。
我们首先做一个简单的试验,如上图。这个人在厨房里,当前正在用微波炉。有一个摄像头在看着他,就跟监控一样,也可以是机器人的眼睛(图左)。首先能够看到他目前在看什么(图中),然后,转换视角,推算他目前看到了什么(图右)。
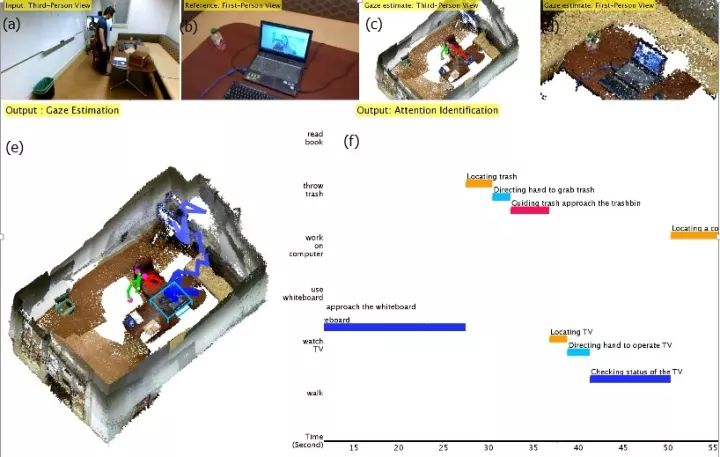
上面这个图是实验的视频的截图。假设机器人事先已经熟悉某个三维房间(图e),它在观察一个人在房间里面做事(图a)。为了方便理解,咱们就想象这是一个养老院或者医院病房,机器人需要知道这个人现在在干什么,看什么(图c)。它的输入仅仅是一个二维的视频(图a)。它开始跟踪这个人的运动轨迹和眼睛注视的地方,显示在图e的那些轨迹和图f的行为分类。然后,图d(右上角)是它估算出来的,这个人应该在看什么的图片。也就是,它把它附体到这个人身上,来感知。这个结果与图b对比,非常吻合。图b是这个人带一个眼镜,眼镜有一个小摄像头记录下来的,他确实在看的东西。这个实验结果是魏平博士提供的,他是西交大前校长郑南宁老师那里的一个青年教师,博士期间在我实验室访问,后来又回来进修。
这里面需要推测动作与物体的时空交互,动作随时间的转换,手眼协调。然后,进一步猜他下面干什么,意图等等。这个细节我不多讲了。
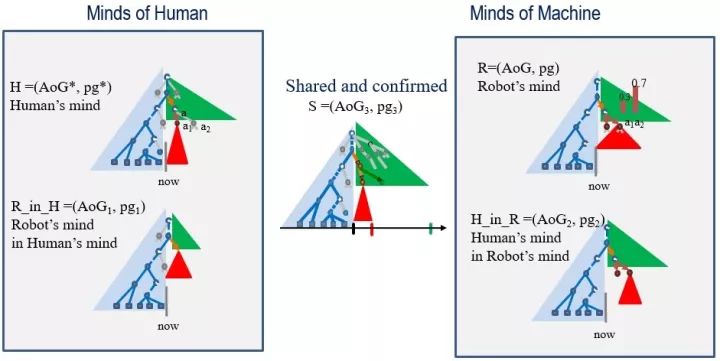
对这个人内心的状态,也可以用一个STC-AOG 和STC-PG 来表达的,见下图,大致包含四部分。
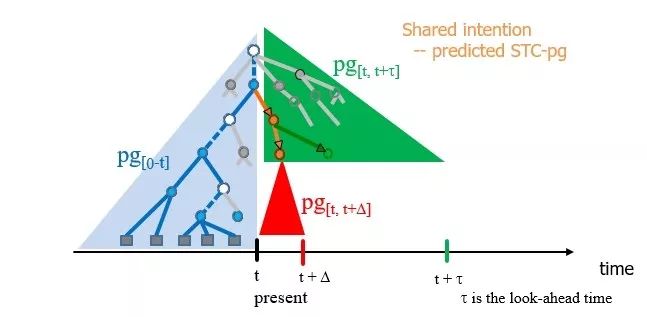
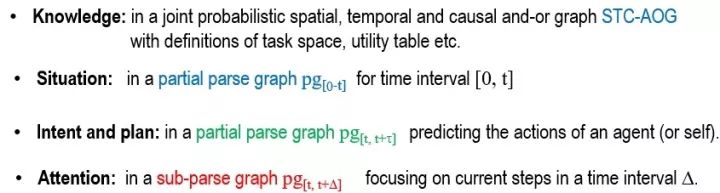
一、时空因果的概率“与或图”,STC-AOG。它是这个人的一个总的知识,包含了所有的可能性,我待会儿会进一步阐述这个问题。 剩下的是他对当前时空的一个表达,是一个STC-PG解译图。此解译图包含三部分,图中表达为三个三角形,每个三角形也是一个STC-PG 解译图。
二、当前的情景situation,由上图的蓝色三角形表示。当前的情况是什么,这也是一个解,表示视觉在0-t时间段之间对这个场景的理解的一个解译图。
三、意向与动作规划图,由上图的绿色三角形表示。这也是一个层次化的解译图,预判他下面还会做什么事情,
四、当前的注意力,由上图的红色三角形表示。描述他正在关注什么。
把这整个解译图放在一块,基本上代表着我们脑袋的过去、现在、未来的短暂时间内的状态。用一个统一的STC-PG 和 STC-AOG来解释。 这是一个层次的分解。 因为是Composition, 它需要的样本就很少。
有人要说了,我的深度神经网络也有层次,还一百多层呢。我要说的是,你那一百多层其实就只有一层,对不对?因为你从特征做这个识别,中间的东西是什么你不知道,他不能去解释中间那些过程,只有最后一层输出物体类别。
我用下面这个图来大致总结一下。两个人A与B或者一个人一个机器人,他们脑袋里面的表达模式。图中是一个嵌套的递归结构,每一个椭圆代表一个大脑的内心mind。
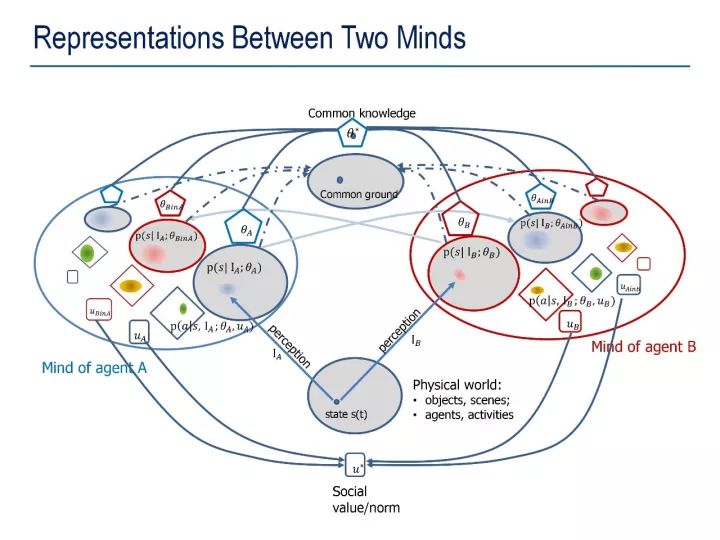
每个mind除了上面谈到的知识STC-AOG 和状态STC-PG,还包含了价值函数,就是价值观,和决策函数。价值观驱动动作,然后根据感知、行动去改变世界,这样因果就出来了。我后面再细谈这个问题。
最底下中间的那个椭圆代表真实世界(“上帝”的mind,真相只有TA知道,我们都不知道),上面中间的那个椭圆是共识。多个人的话就是社会共识。在感知基础上,大家形成一个统一的东西,共同理解,我们达成共识。比如,大家一起吃饭,菜上来了,大家都看到这个菜是什么菜,如果没有共识那没法弄。比如,“指鹿为马”或者“皇帝的新装”,就是在这些minds之间出现了不一致的东西。这是所谓“认识论”里面的问题。以前,在大学学习认识论,老师讲得比较空泛,很难理解;现在你把表达写出来,一切都清楚了。这也是人工智能必须解决的问题。
我们要达成共识,共同的知识,然后在一个小的团体、大致社会达成共同的价值观。当有了共同价值观的时候,就有社会道德和伦理规范,这都可以推导出来了。俗话说,入乡随俗。
那么如何达成共识呢?语言就是必要的形成共识的工具了。
第七节 语言通讯:沟通的认知基础
我要介绍的人工智能的第三个领域是语言、对话。最近我两次在视觉与语言结合的研讨会上做了报告,从我自己观察的角度来谈,视觉与语言是密不可分的。
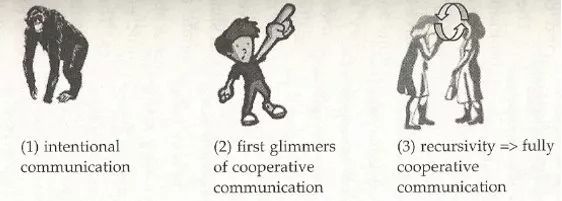
动物之间就已经有丰富的交流的方式,很多借助于肢体语言。人的对话不一定用语言,手语、哑剧(pantomine)同样可以传递很多信息。所以,在语言产生之前,人类就已经有了十分丰富的认知基础,也就是上一节谈的那些表达。没有这样的认知基础,语言是空洞的符号,对话也不可能发生。
如果是人的话,我们就会热心地指那个小孩的方向,人天生是合作的,去帮助别人的,助人为乐,所以这是为什么我们人进化出来了。猩猩不会,猩猩不指,它们没有这个动机,它们脑袋与人相比一定是缺了一块。
除了需要这个认知基础,语言的研究不能脱离了视觉对外部世界的感知、机器人运动的因果推理,否则语言就是无源之水、无本之木。这也就是为什么当前一些聊天机器人都在“扯白”。
我们先来看一个最基本的的过程:信息的一次发送。当某甲(sender)要发送一条消息给某乙(receiver),这是一个简单的通讯communication。这个通讯的数学模型是当年贝尔实验室香农Shannon1948年提出来的信息论。首先把它编码,因为这样送起来比较短,比较快;针对噪声通道,加些冗余码防错;然后解码,某乙就拿到了这个信息。见下图。
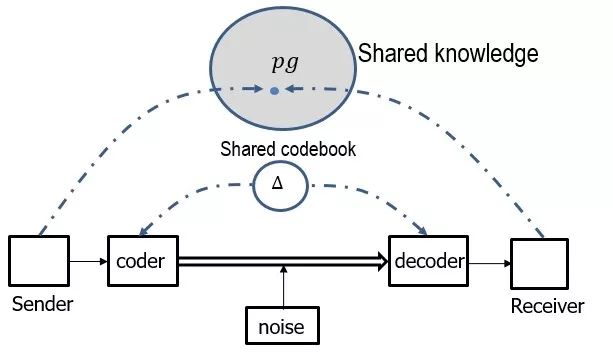
在这个通讯过程之中他有两个基本的假设。第一、这两边共享一个码本,否则你没法解码,这是一个基本假设。第二、就是我们有个共享的外部世界的知识在里面,我们都知道世界上正在发生什么什么事件,比如哪个股票明天要涨了,哪个地方要发生什么战争了等等。我给你传过去的这个信息其实是一个解译图的片段(PG:parse graph)。这个解译图的片段对于我们物理世界的一个状态或者可能发生的状态的描述。这个状态也有可能就是我脑袋Mind里面的一个想法、感觉、流态(fluents)。比如,很多女人拿起电话,叫做“煲粥”,就在交流内心的一些经历和感受。
Shannon的通讯理论只关心码本的建立(比如视频编解码)和通讯带宽(3G,4G,5G)。1948年提出信息论后,尽管有很多聪明人、数学根底很强的人进到这个领域,这个领域一直没有什么大的突破。为什么?因为他们忽视了几个更重大的认识论的问题,避而不谈:
甲应该要想一下:乙脑袋里面是否与甲有一个共同的世界模型?否则,解码之后,乙也不能领会里面的内容?或者会误解。那么我发这个信息的时候,措辞要尽量减少这样的误解。
甲还应该要想一下:为什么要发这个信息?乙是不是已经知道了,乙关不关注这个信
息呢?乙爱不爱听呢?听后有什么反应?这一句话说出去有什么后果呢?
乙要想一下:我为什么要收这个信息呢?你发给我是什么意图?
这是在认知层面的,递归循环的认知,在编码之外。所以,通讯理论就只管发送,就像以前电报大楼的发报员,收钱发报,他们不管你发报的动机、内容和后果。
纵观人类语言,中国的象形文字实在了不起。所谓象形文字就完全是“明码通讯”。每个字就是外部世界的一个图片、你一看就明白了,不需要编解码。我觉得研究自然语言的人和研究视觉统计建模的人,都要好好看看中国的甲骨文,然后,所有的事情都清楚了。每个甲骨文字就是一张图,图是什么?代表的就是一个解译图的片段(fragment of parse graph)。
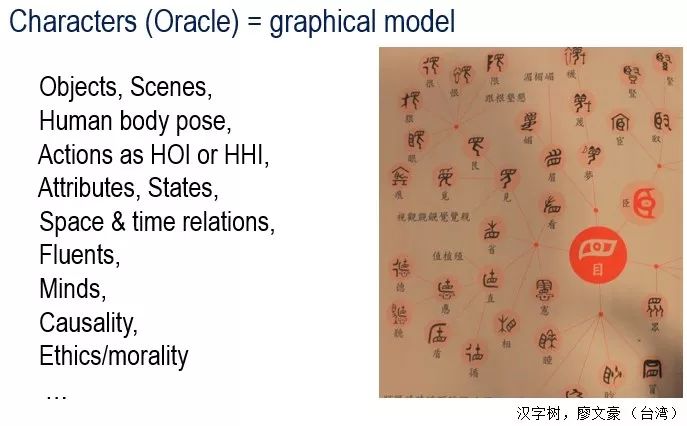
上面这个图是一个汉字的演变和关系图,从一本书叫做《汉字树》得来的。几年前,我到台湾访问,发现这本丛书,很有意思。这个图是从眼睛开始的一系列文字。
首先从具象的东西开始,这中间是一个眼睛,“目”字,把手搭在眼睛上面,孙悟空经常有这个动作,就是“看”(look)。
然后是会意,比如“省”,就是细看,明察秋毫,画一个很小的叶子在眼睛上面,指示说你看叶子里面的东西,表示你要细看。
然后开始表达抽象的概念,属性attribute、时空怎么表达,就是我们甲骨文里面,表示出发、终止,表示人的关系,人的脑袋状态,甚至表现伦理道德。就这样,一直推演开。
所以,搞视觉认知的,要理解物体功能就要追溯到石器时代去,搞语言的要追溯到语言起源。
下图是另一个例子:日、月、山、水、木;鸟、鸡、鱼、象、羊。下面彩色的图是我们实验室现在用计算机视觉技术从图像中得到的一些物体的表达图模型,其实就重新发明一些更具像的甲骨文。这项技术是由YiHong,司长长等博士做的无监督学习。他们的算法发现了代表鸟的有头、身子和脚、水波和水草等“类甲骨文”名词符号。这种视觉的表达模型是可解释explainable、直观的。
所以,从生成式模型的角度来看,语言就是视觉,视觉就是语言。

再来看看动词。考考你们,这是啥意思?第一个字,两只手,一根绳子,在拖地上一个东西,拿根绳子拽。第二个很简单,洗手。第三是关门。第四是援助的援字,一只手把另外一个人的手往上拉。第五也是两个手,一个手朝下一个手朝上,啥意思?我给你东西,你接受。第六是争夺的争,两个手往相反的方向抢。第七两个人在聊天。基本上,字已经表示了人和人之间的动作细节。

现在我的实验室里,计算机也能自动学出“类甲骨文”的动词的表达,见下图。我们学出来的这些两个人交互的动作包括:坐、玩手机、握手、人拉人等等。我们把这些动作模型分别叫做4DHOI (4D Human-Object Interaction)、4Dhoi(4D hand-object interaction)、4DHHI (4D Human-Human Interaction)。
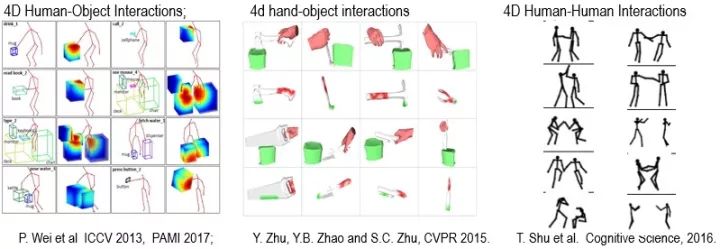
我刚才说了名词和动词,还有很多其他的东西,我建议你们去研究一下,要建模型的话我们古代的甲骨文其实就是一个模型,他能够把我们世界上所有需要表达的东西都给你表达了,是一个完备了的语言模型。
现在,我们回到语言通讯、人与机器人对话的问题。下图就是我提出的一个认知模型。
两个人之间至少要表达五个脑袋minds:我知道的东西、你知道的东西、我知道你知道的东西、你知道我知道的东西、我们共同知道的东西。还有,对话的时候你的意图是什么等等诸多问题。具体我不讲那么多了。
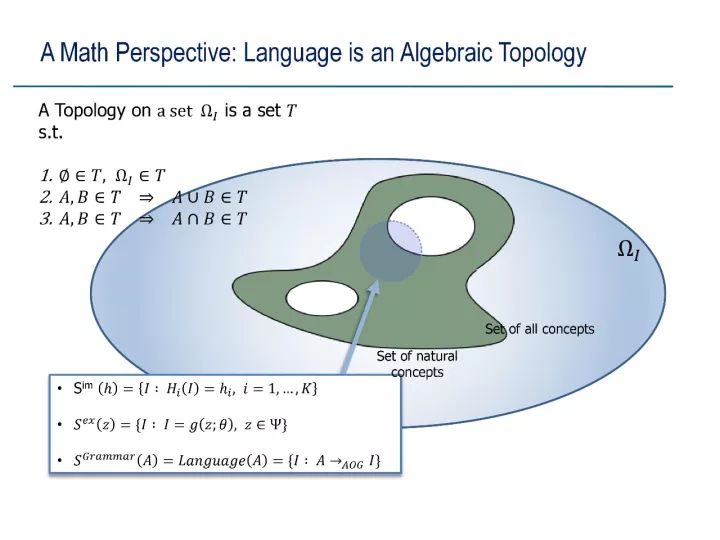
最后,我想谈一点,语言与视觉更深层的联系、与数学中代数拓扑的联系。拓扑学是什么意思?就是说图象空间,语言空间,就是一个大集合,全集。
第八节 博弈伦理:获取、共享人类的价值观
机器人要与人交流,它必须懂得人类价值观。哲学和经济学里面有一个基本假设,认为一个理性的人(rational agent),他的行为和决策都由利益和价值驱动,总在追求自己的利益最大化。与此对应的是非理性的人。对于理性的人,你通过观察他的行为和选择,就可以反向推理、学习、估算他的价值观。我们暂时排除他有可能故意假装、迷惑我们的情况。
人与人的价值不同,就算同一个人,价值观也在改变。本文不讨论这些社会层面的价值观,我们指的是一些最基本的、常识性的、人类共同的价值观。比如说把房间收拾干净了,这是我们的共识。
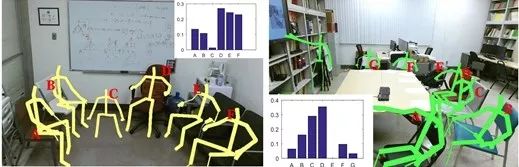
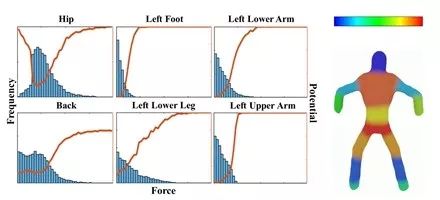
上图是我做的一个简单的实验。我把几种不同的椅子、凳子放在我办公室(左图)和实验室(右图)。然后,我统计一下学生进来以后,他喜欢坐哪个椅子,实在不行可以坐地上。这样我就可以得到这些椅子的排序。A、B、C、D、E、F、G排个序,见上面的统计图。我观察了这些人的选择,就问:为什么这个椅子比那个椅子好?是什么好?这其实就反映了人的脑袋里面一个基本的价值函数。又说一遍:很普通的日常现象,蕴含深刻的道路。苹果落地不是这样吗?大家司空见惯了,就不去问这个问题了。
见下图,比如背部、臀部、头部受多少力。

下图中蓝色的直方图显示了六个身体部位的受力分别图。由此我们就可以推算出每个维度的价值函数。下面图中六条红色的曲线是负的价值函数,当人的坐姿使得各部位受力处于红线较低的值,就有较高的“价值”,也就是坐得“舒服”。当然每个人可能不一样,有的人腰疼必须坐硬板凳子有的人喜欢坐软沙发。这也是为什么,如果你观察到有些异样,可以推导这个人某地方可能受伤了。
读到这里,你不禁要问:这不是与物理的势能函数,如重力场,一样吗?对,就是一个道理。这也是在最后一节我将要说的:达尔文与牛顿的理论体系要统一。
这对我们是常识,但是机器人必须计算出很多这样的常识,TA需要设身处地为人着想,这个就不容易了。
最近大家谈论较多的是机器人下棋,特别是下围棋,的确刺激了国人的神经。下棋程序里面一个关键就是学习价值函数,就是每一个可能的棋局,它要有一个正确的价值判断。
谈到这里,我想顺便对比两大类学习方法。
一、归纳学习 Inductive learning。我们通过观察大量数据样本,这些样本就是对某个时期、某个地域、某个人群达成的准平衡态的观察。也是我前面谈过的千年文化的形成与传承。
二、演绎学习 Deductive learning。这个东西文献中很少,也就是从价值函数(还有物理因果)出发,直接推导出这些准平衡态,在我看来,这也是一个STC-AOG。这就要求对研究的对象有深刻的、生成式的模型和理解。
第九节 机器人学:构建大任务平台
我在第四节谈到人工智能研究的认知构架,应该是小数据、大任务范式。机器人就是这么一个大任务的科研平台。它不仅要调度视觉识别、语言交流、认知推理等任务,还要执行大量的行动去改变环境。我就不介绍机械控制这些问题了,就用市面上提供的通用机器人平台。
前面介绍过,人和机器人要执行任务,把任务分解成一连串的动作,而每个动作都是要改变环境中的流态。
我把流态分作两大类:
(1)物理流态 (Physical Fluents):如下图左边,刷漆、烧开水、拖地板、切菜。
(2)社会流态 (Social Fluents): 如下图右边,吃、喝、 追逐、搀扶,是改变自己内部生物状态、或者是与别人的关系。

当机器人重建了三维场景后(在谈视觉的时候提到了,这其实是一个与任务、功能推理的迭代生成的过程),它就带着功利和任务的眼光来看这个场景。如下图所示,哪个地方可以站,哪个地方可以坐,哪个地方可以倒水等等。下面图中亮的地方表示可以执行某个动作。这些图在机器人规划中又叫做Affordance Map。意思是:这个场景可以给你提供什么?

有了这些单个基本任务的地图,机器人就可以做任务的规划。这个规划本身就是一个层次化的表达。文献中有多种方法,我还是把它统一称作一种STC-PG。这个过程,其实相当复杂,因为它一边做,一边还要不断看和更新场景的模型。因为我前面介绍过,对环境三维形状的计算精度是根据任务需要来决定的,也就是Task-Centered视觉表达。
这个动作计划的过程还要考虑因果、考虑到场景中别人的反应。考虑的东西越多,它就越成熟,做事就得体、不莽莽撞撞。
我一开始讲到的那个机器人竞赛,这些感知和规划的任务其实都交给了一群在后台遥控的人。
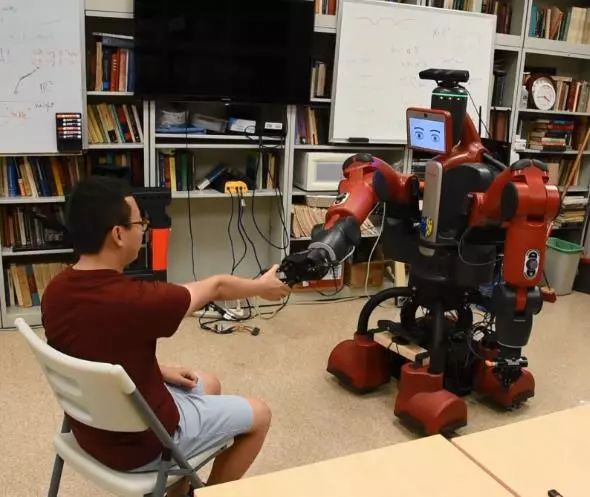
下面,我就简单介绍几个我实验室得到的初步演示结果,后台没有遥控的人。我实验室用的是一个通用的Baxter机器人,配上一个万向移动的底座和两个抓手(grippers),还有一些传感器、摄像头等。两个抓手是不同的,左手力道大,右手灵活。很有意思的是,如果你观察过龙虾等动物,它的两个钳子也是不同的,一个用来夹碎、一个是锯齿状的。
下图是一个博士生舒天民教会了机器人几种社交动作,比如握手。握手看似平常,其实非常微妙。但你走过去跟一个人握手的过程中,你其实需要多次判断对方的意图;否则,会出现尴尬局面。舒的论文在美国这边媒体都报道过。
下面这个组图是机器人完成一个综合的任务。首先它听到有人去敲门,推断有人要进来,它就去开门。其次,它看到这个人手上拿个蛋糕盒子,双手被占了,所以需要帮助。通过对话,它知道对方要把蛋糕放到冰箱里面,所以它就去帮人开冰箱的门(上右图)。这个人坐下来后,他有一个动作是抓可乐罐,摇了摇,放下来。它必须推断这个人要喝水,而可乐罐是空的(不可见的流态)。假设它知道有可乐在冰箱,它后面就开冰箱门拿可乐,然后递给人。

当然,这个是受限环境,要能够把样的功能做成任意一个场景的话,那就基本能接近我们前面提到的可敬的乌鸦了。我们还在努力中!
第十节 机器学习:学习的极限和“停机问题”
前面谈的五个领域,属于各个层面上的“问题领域”,叫Domains。我们努力把这些问题放在一个框架中来思考,寻求一个统一的表达与算法。而最后要介绍的机器学习,是研究解决“方法领域”(Methods),研究如何去拟合、获取上面的那些知识。打个比方,那五个领域就像是五种钉子,机器学习是研究锤子,希望去把那些钉子锤进去。深度学习就像一把比较好用的锤子。当然,五大领域里面的人也发明了很多锤子。只不过最近这几年深度学习这把锤子比较流行。
网上关于机器学习的讨论很多,我这里就提出一个基本问题,与大家探讨:学习的极限与“停机问题”。
首先,到底什么是学习?
当前大家做的机器学习,其实是一个很狭义的定义,不代表整个的学习过程。见下图。 它就包含三步:
(1)你定义一个损失函数loss function 记作u,代表一个小任务,比如人脸识别,对了就奖励1,错了就是-1。
(2)你选择一个模型,比如一个10-层的神经网络,它带有几亿个参数theta,需要通过数据来拟合。
(3)你拿到大量数据,这里假设有人给你准备了标注的数据,然后就开始拟合参数了。
这个过程没有因果,没有机器人行动,是纯粹的、被动的统计学习。目前那些做视觉识别和语音识别都是这一类。
其实真正的学习是一个交互的过程。 就像孔子与学生的对话,我们教学生也是这样一个过程。 学生可以问老师,老师问学生,共同思考,是一种平等交流,而不是通过大量题海、填鸭式的训练。坦白说,我虽然是教授,现在就常常从我的博士生那里学到新知识。
这个学习过程是建立在认知构架之上的(第六节讲过的构架)。我把这种广义的学习称作通讯学习Communicative Learning,见下图。
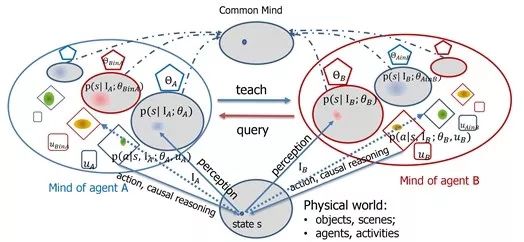
这个图里面是两个人A与B的交流,一个是老师,一个是学生,完全是对等的结构,体现了教与学是一个平等的互动过程。每个椭圆代表一个脑袋mind,它包含了三大块:知识theta、决策函数pi、价值函数mu。最底下的那个椭圆代表物理世界,也就是“上帝”脑袋里面知道的东西。上面中间的那个椭圆代表双方达成的共识。
这个通讯学习的构架里面,就包含了大量的学习模式,包括以下七种学习模式(每种学习模式其实对应与图中的某个或者几个箭头),这里面还有很多模式可以开发出来。
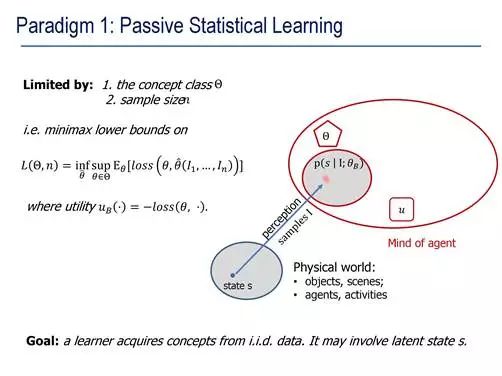
(1)被动统计学习passive statistical learning:上面刚刚谈到的、当前最流行的学习模式,用大数据拟合模型。
(2)主动学习active learning:学生可以问老师主动要数据,这个在机器学习里面也流行过。
(3)算法教学algorithmic teaching:老师主动跟踪学生的进展和能力,然后,设计例子来帮你学。这是成本比较高的、理想的优秀教师的教学方式。
(4) 演示学习learning from demonstration:这是机器人学科里面常用的,就是手把手叫机器人做动作。一个变种是模仿学习immitation learning。
(5)感知因果学习perceptual causality:这是我发明的一种,就是通过观察别人行为的因果,而不需要去做实验验证,学习出来的因果模型,这在人类认知中十分普遍。
(6)因果学习causal learning:通过动手实验, 控制其它变量, 而得到更可靠的因果模型, 科学实验往往属于这一类。
(7)增强学习reinforcement learning:就是去学习决策函数与价值函数的一种方法。
我在第一节谈到过,深度学习只是这个广义学习构架里面很小的一部分,而学习又是人工智能里面一个领域。所以,把深度学习等同于人工智能,真的是坐井观天、以管窥豹。
其次,学习的极限是什么?停机条件是什么?
我们学习、谈话的过程,其实就是某种信息在这些椭圆之间流动的过程。那么影响这个流动的因素就很多,我列举几条如下。
(1)教与学的动机:老师要去交学生一个知识、决策、价值,首先他必须确认自己知道、而学生不知道这个事。同理,学生去问老师,他也必须意识到自己不知道,而这个老师知道。那么,一个关键是,双方对自己和对方有一个准确的估计。
(2)教与学的方法:如果老师准确知道学生的进度,就可以准确地提供新知识,而非重复。这在algorithmic learning 和 perceptual causality里面很明显。
(3)智商问题:如何去测量一个机器的智商?很多动物,有些概念你怎么教都教不会。
(4)价值函数:如果你对某些知识不感兴趣,那肯定不想学。价值观相左的人,那根本都无法交流,更别谈相互倾听、学习了。比如微信群里面有的人就待不了,退群了,因为他跟你不一样,收敛不到一起去,最后同一个群的人收敛到一起去了,互相增强。这在某种程度上造成了社会的分裂。
第十一节 总结:智能科学 --- 牛顿与达尔文理论体系的统一
什么叫科学?物理学是迄今为止发展最为完善的一门科学,我们可以借鉴物理学发展的历史。我自己特别喜欢物理学,1986年报考中科大的时候,我填写的志愿就是近代物理(4系)。填完志愿以后,我就回乡下去了。我哥哥当时是市里的干部,他去高中查看我的志愿,一看报的是物理,只怕将来不好找工作,他就给我改报计算机。当时我们都没见过计算机,他也没跟我商量,所以我是误打误撞进了这个新兴的专业,但心里总是念念不忘物理学之美。
等到开学,上《力学概论》的课,教材是当时常务副校长夫妇写的,我这里就不提名字了,大家都知道,这是科大那一代人心中永恒的记忆。翻开书的第一页,我就被绪论的文字震撼了。下面是一个截图,划了重点两句话,讨论如下。
(1)物理学的发展就是一部追求物理世界的统一的历史。第一次大的统一就是牛顿的经典力学, 通过万有引力把天界星体运动与世俗的看似复杂的物体运动做了一个统一的解释。形成一个科学的体系,从此也坚定了大家的信念:
“物理世界存在着完整的因果链条”。
物理学的责任就是寻找支配自然各种现象的统一的力。
这完全是一个信念,你相信了,就为此努力!自牛顿以来,300多年了,物理学家还在奋斗,逐步发现了一个美妙的宇宙模型。
智能科学的复杂之处在于:
(1)物理学面对的是一个客观的世界,当这个客观世界映射到每个人脑中, 形成一个主观与客观融合的世界,也就是每个人脑中的模型(这是统计中贝叶斯学派观点)。这个模型又被映射到别人脑袋之中。每个脑Mind里面包含了上百个他人的模型的估计。 由这些模型来驱动人的运动、行为。
(2)物理学可以把各种现象隔离出来研究,而我们一张图像就包含大量的模式, 人的一个简单动作后面包含了很复杂的心理活动,很难隔离开。况且,当前以大数据集为依据的“深度学习”学派、“刷榜派”非常流行,你要把一个小问题单独拿出来研究,那在他们复杂数据集里面是讨不到什么便宜的。文章送到他们手上,他们就“强烈拒绝”,要求你到他们数据集上跑结果。这批人缺乏科学的思维和素养。呜呼哀哉!
回到前面乌鸦的例子,我在第四节讨论到,我们研究的物理与生物系统有两个基本前提:
一、智能物种与生俱来的任务与价值链条。这是生物进化的“刚需”,动物的行为都是被各种任务驱动的,任务由价值函数决定,而后者是进化论中的phenotype landscape,通俗地说就是进化的适者生存。
二、物理环境客观的现实与因果链条。这就是自然尺度下的物理世界与因果链条,也就是牛顿力学的东西。
说到底,人工智能要变成智能科学,它本质上必将是达尔文与牛顿这两个理论体系的统一。
2016年我到牛津大学开项目合作会,顺便参观了伦敦的Westminster Abbey 大教堂。 让我惊讶的是:牛顿(1642-1727)与达尔文(1809-1882)两人的墓穴相距也就2-3米远。站在那个地点,我当时十分感慨。 这两个人可以说是彻底改变人类世界观的、最伟大的科学巨人,但是他们伟大的理论体系和思想的统一,还要等多久呢?
这篇长文的成稿正好是深秋,让我想起唐代诗人刘禹锡的《秋词》,很能说明科研的一种境界,与大家共赏:
“自古逢秋悲寂寥,我言秋日胜春朝。
晴空一鹤排云上,便引诗情到碧霄。”
附录
主持人: 王蕴红教授介绍辞(多谢溢美之词,在此省略)。
朱 开场白:
感谢谭铁牛老师多次关照和王蕴红老师的盛情邀请。今天是星期天,非常不好意思,耽误大家休息时间。我知道大家平时都很忙,你们坚持听到最后一讲,非常不容易。所以,我给你们带来一点干货,作为“精神补偿”。
今天的讲座是个命题作文,王老师要我谈人机交互。到底什么是人机交互,它要解决哪些问题?我就花了一周时间整理了一个比较长的讲座,给大家介绍人工智能的发展,和人机交互的体系结构。这个问题非常大,而且研究工作刚刚起步,大家需要把很多问题放在一起看、才能看出大致的轮廓。我给大家提一个思路,启发大家思考,我并不想直接给出一个解答方法。那样的话就剥夺了你们思考的空间和权利。
2017年初我在《视觉求索》发表过一篇谈“学术人生”的文章,讲到做学问的一个理想境界就是“清风明月”,也就是夜深人静的时候,你去科学前沿探索真理。今天的讲座,希望把大家带到这么一个空旷的地方,去领略一番。
报告后的提问互动:
提问一:朱老师,机器怎么通过学习让它产生自我意识。刚才您演示的那个机器人,门口有个人他要进来,Ta怎么知道自己后退把路给让出来?
朱:自我意识这个问题非常重要。我先简要介绍一下背景,再回答你的问题。
自我意识(self-awareness,consciousness)在心理学领域争议很大,以至于认知学会一度不鼓励大家去谈这个问题,这个方向的人多年拿不到研究经费。人工智能里面有少数人在谈,但是,还不落地。自我意识包括几点:
(1)感知体验。我们花钱去看电影、坐过山车、旅游,其实买的就是一种体验。这种体验是一种比较低层次的自我意识,形成一种表达(可以是我上面讲到的解译图)。 事后你也可以回味。
(2)运动体验。我们虽然有镜子,可是除了舞蹈人员,大家并没有看到自己的行为动作。但是, 我们对自己的体态和动作是有认知的。我们时刻知道我们的体态和三维动作。比如,心理学实验,把你和一群人(熟悉和不熟悉的都有)的动作步态用几个关节点做运动捕捉,记录下来,然后,就把这些点放给你看,你只看到点的运动,看不到其它信息。你认出哪个人是你自己的比率高于认出别人,而且对视角不那么敏感。所以,我们通过感知和运动在共同建立一个自我的三维模型。这两者是互通的,往往得益于镜像神经元(mirror neurons)。这是内部表达的一个关键转换机制。
机器人在这方面就比较容易实现,它有自己的三维模型,关节有传感器,又有Visualodometry, 可随时更新自己在场景中的三维位置和形态。这一点不难。
(3)自知之明。中国有个俗语叫做“人贵有自知之明”。换句话说,一般人很难有自知之明。对自己能力的认识,不要手高眼低、或者眼高手低。而且这种认识是要随时更新的。比如,喝酒后不能开车,灯光暗的时候我的物体识别能力就不那么强,就是你对自己能力变化有一个判断。我们每天能力可能都不一样其实,这个相当复杂了。
比如,机器人进到日本福岛救灾场景,核辐射随时就在损害机器人的各种能力。突然,哪一条线路不通了,一个关节运动受限了,一块内存被破坏了。它必须自己知道,而后重新调整自己的任务规划。目前人工智能要做到这一点,非常难。
刚才说的人进来、机器人知道往后退,那就是一个协调动作的规划。你规划动作、首先要知道对方是什么动作。比如,人与人握手就其实是非常复杂的互动过程。为了达成这个目标,你要在脑内做模拟simulate。
提问二:谢谢朱教授,感觉今天听到的都是我以前从来没有听过的东西。我有一个问题就是像机器人这种自我认识都很难,像您说的交互他还要去理解对方那个人的想法,这种信息他怎么来获取呢?也是通过学习还是?
朱:靠观察与实践。你看别人做事你就观察到,你就能够学到每个人都不一样的价值函数,你就了解到你周围的同事,比如你们共享一个办公室,或者观察你家庭里面的人,你跟他生活的时间越长,你就越来越多的知道他怎么想问题、怎么做事,然后你跟他在交互的过程中越来越默契了。除了观察,还有实践,就是去试探、考验对方。
夫妻之间,刚结婚会吵架,之后越吵越少了、和谐了,价值观融合大致收敛了、或者能够互相容忍了。实在无法收敛,那就分道扬镳,到民政局办手续。这两种情况都是我说的“学习的停机问题”。大家之间不要再相互交流、学习了,要么心领神会、心照不宣;要么充耳不闻、形同陌路。
提问三:他也是通过他自己观察到,它里面建立一个图吗?一个解译图(parse graph)吗?
朱:在我看来是这样的。就是我必须把你脑袋里面的很多结构尽量重构出来,表达层面就是解译图,至于人脑如何在神经元层面存储这个解译图,我们不清楚。人脑肯定有类似的表达,我脑袋里面有你的表达后,我就可以装或者演你的对各种情况的反应。
文学作家创作的时候,他脑袋里面同时要装下几十、上百号人的模型和知识表达,那些人知道什么、什么时候知道的。读文科的人一般观察比较敏锐。表演艺术家在这方面能力肯定也特别强。
提问四:像我们刚接触机器学习,你有没有什么推荐的,因为现在大家都在追踪训练深度网络,有没有一个推荐的,就是概率模型还是什么东西,一个数学理论或者一个数学工具。
朱:我的想法是这样的,首先让大家端正思想,就是你想学,探索真理和未知。就是说在夜深人静的时候你探索真理,等你心境沉静下来,你自然就看到一些别人忽略的东西。不要让我推荐某个工具、代码、秘籍,拿来就用。我今天讲的东西都不是来源于某一个理论、工具,是融会贯通后的结果。
我反复告诫学生们,做科学研究不是过去那种到北京天桥看把戏,哪里热闹就往哪里钻。我以前也谈到过一个“路灯的隐喻”,科学研究就像在一个漆黑的夜晚找钥匙,大家喜欢聚在路灯底下找,但是很可能钥匙不在那个灯底下。
提问五:朱老师好,非常庆幸来听这个报告,我最后一个问题很简单。您说那几个时期,我想问一下秦朝到底什么时候能到?到秦朝的时候,数学的哪一块你认为,可能会被用做秦朝的武器或者最厉害的那个武器是什么。
朱:问得很好。什么时候会达到统一?这个事情中国有两个说法,都有道理。
一种说法叫做“望山跑死马”。你远远望见前面那个山快到了,你策马前行,可是马跑死都到不了,中间可能还有几条河拦住去路。那是我们对这个事情估计不足。
第二个说法是“远在天边,近在眼前”。 能不能到达,决定于你这边的人的智慧和行动。什么时候统一、谁来统一,这决定于我们自己努力了。春秋和战国时期,思想家是最多的,诸子百家全部都出来了,那是一个思想激烈碰撞的时代。我今天讲的这些东西其实都在我脑袋里面激烈的碰撞,我还有些问题想不通。
我们现在谈这个事情和框架,你觉得世界上有多少人在做?我的观察是:极少,也许一只手就可以数得过来。
你的第二个问题,如果要统一,那最厉害的数学工具是什么?我们要建立统一的知识表达:概率和逻辑要融合,和深度学习也要融合。我们看看物理学是如何统一的,他们里面各种模型(四大类的力与相互作用)必须融洽,然后解释各种现象。简单说我们需要搞清楚两点:
一、什么地方用什么模型? 对比经典力学、电磁学、光学、统计物理、粒子物理等都有自己的现象、规律和使用范围。我们这边也类似,各种模型有它们的范围和基础,比如我们常常听说的,吉布斯模型往往就在高熵区,稀疏模型在低熵区,与或图语法用在中熵区。这一块除了我的实验室,世界上没有其他人研究。
二、这些模型之间如何转化? 前面我讲了一个例子,我写了一篇关于隐式(马尔科夫场)与显式(稀疏)模型的统一与过渡的信息尺度的论文,投到CVPR会议,结果,三个评分是“(5)强烈拒绝;(5)强烈拒绝;(4)拒绝”。大家根本就没想这个问题,眼睛都巴巴地看着数据集、性能提升了多少。刷榜成了CVPR科研的重要范式。在某些人眼中,刷榜成了唯一方式。我以前是批判这个风气,后来一想,其实应该多鼓励。我对那些把大众带到沟里去的学术领军人物,以前是批评,现在我特别感激Ta们。这样我自己的学生才有更多时间去实现我们的思路。你们都一起涌过来踩踏、乱开乱挖,我都躲不开。我做研究喜欢清静,不去赶热闹,不去追求文章引用率这些指标。
王蕴红教授总结(整理):今天朱教授的报告,大家可以感觉到两点。
一、纵横捭阖、举重若轻。纵论、横论整个人工智能六大领域很多深刻的题目,在很多层面上纵横交叉的线,他理得非常清楚、举重若轻,收发自如。非常幸运能听到这样的报告。
二、授人以渔而不是鱼。他讲的是如何去思考问题,如何去看世界,如何研究一些真正本质的东西。近几年深度学习被过多强调之后,有很多博士生还有一些研究者过于依赖工具,思考的能力被损坏了。其实研究的世界那么大,你一定要抬起头来看看,仰望星空。
鸣谢
感谢微软研究院郭百宁、华刚、代季峰等博士2016年9月在北京组织的研讨会。2017年6月汤晓鸥、王晓刚、林倞等教授邀请我在香港中文大学所作的报告。沈向洋博士在2017年7月西雅图组织的碧慧论坛。2017年9月在谭铁牛教授关照下、王蕴红教授在中科院自动化所举办的人工智能人机交互讲习班、并指派速记员和北航博士生刘松涛同学整理出报告的中文初稿。假若没有他们的耐心、催促、鼓励和协助,这篇中文报告是不可能产生的。报告中的部分图片由VCLA@UCLA实验室朱毅鑫、魏平、舒天民等人协助整理。
感谢中科大阮耀钟教授、杨志宏同学帮我找到那本珍藏的《力学概论》电子扫描版。其绪论被摘录在文中。我的思想受到这本书的启蒙。
感谢《视觉求索》公众号编辑部周少华、华刚、吴郢、罗杰波等同仁的协助。
感谢美国多家机构对文中提及研究的长期支持。
未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”





G460AL-ITH Linux笔记本电脑接口评测-ZOL中关村在线...)














