
来源:东晓科学网博客
前几天,EHT (Event Horizon Telescope)(事件水平线望远镜)研究团队发布重大新闻,公布了人类首次拍到的黑洞“照片“”,同时公布了7篇由200多名科学家署名的相关论文。所谓黑洞是爱因斯坦引力方程的一个 理论解。由于黑洞强大的引力,即使是无线电波在一定的距离内也无法挣脱。所谓 Event Horizon 是指信号消失的那个分界,对于没有转动的黑洞来说,这是一个球面。如果黑洞周围有大量尘埃绕黑洞形成一个吸积盘,这些物质绕黑洞旋转、最终吸入黑洞,在这个过程中,引力能转换为热能使其尘埃温度升高,尘埃中加速运动带电的粒子会发出无线电波,向空间传播出去。但是带电粒子离黑洞近到一个距离后,它们发出的无线电波也会被吸入黑洞,我们也就无法接收到了。这样从远处看来,黑洞所在处的中央会有一个区域一片沉寂,而周围一个环状空间有信号。EHT的 M87 黑洞照片似乎验证了理论的预测。EHT的新闻引发了强烈的兴趣,爱因斯坦一百多年前的理论再次得到了检验,网上科普文章视频也如雨后春笋一般。但这些科普似乎没有解答一个基本问题:EHT 是如何给 M87 黑洞拍照的。
普通光学照相机的成像是把来自被拍摄物体不同点的光折射到感光片的不同点。无论是传统的胶片还是现代的数码感光芯片,理论上感光片上的一点与被拍摄物的一点对应。这是一个被拍摄物与感光片的直接空间对应关系。光学成像非常好理解,哈勃望远镜也是这个原理,拍摄了很多遥远天体的照片。但可惜我们无法用照相机给 M87 的 黑超级洞用这个方法拍照,因为它周围布满的星际尘埃阻挡了可见光。EHT 给黑洞“拍照”使用的是射电望远镜,其收集信号的装置是一个接收无线电信号的圆盘天线。
但是射电望远镜收到的只是一个信号。以 M87 黑洞为例,整个黑洞及其周围空间在射电望远镜处产生的只是一个随时间变化的电压信号。这有点像 听交响乐演奏。乐队各种乐器成半环形,中间是一个指挥。虽然交响乐团各种乐器在不同位置发出不同的声音,它们产生的空气振动传到人的耳朵,叠加起来产生空气压力随时间的变化。乐团里不同乐器在不同位置、不同频率、不同波形的振动传递到人的一只耳朵变成一个数字的变化,这个数字就是压力。这跟我们用眼睛欣赏乐团的表演形成鲜明的对比,我们眼睛看到不同的乐手在以各种动作演奏不同的乐器 -- 不同空间位置在我们的视网膜上的不同点成像。为什么不能将声波像可见光那样点对点成像呢?因为声音的波长可以达米的量级,要进行分辨,接收”设备”得更大,而我们的内耳大小有限。
听交响乐时,人耳感受到的只是一个空气压力的变化。如果我们能够根据空气压力的变化,反推出一个环形的乐器分布,并且判断出中间没有声音发出,我们就得到了交响乐队的布局图像:声音发自半圆形的乐队,中间是无声的指挥。怎么从空气压强的变化还原出每个乐器的位置,形成一个乐队的基本位置图呢?
大家可以做一个实验。如果捂住一只耳朵,你会发现很难判断声音的方向。人的大脑能够根据两只耳朵接受同一个声音的相位、大小不同进行位置分析。光有一只耳朵听,就少了判断依据。再做一个实验,播放高音的音乐,闭上眼睛、两耳聆听,能够比较容易的判断发出声音的方向;如果改成低音,就很难判断了。波长与频率成反比。声速约 300米/秒,如果频率是300赫兹,那么声波长为1米,这个波长远大于两个耳朵之间的距离,两只耳朵得到的信号相差很小,判断难度就大了。可以想象如果不是用两耳听,而是在不同方向,摆上很多个声音接收器,应该可以用数学方法形成一幅声源的 分强度布图。这相当于多个未知数用多个方程解出。EHT 的望眼镜每次接收到的 信号是整个黑洞及其周围空间发出的全部信号的总和。用 EHT 射电望远镜给黑洞成像类似于通过接收到的声音推算出乐队各个乐器的声音大小与布局。
EHT 用8个射电望远镜观测黑洞,记录下收到的信号(包括精确的时间),然后两两组合形成一个相关数据。但 8台望远镜也只有 8*(8-1)/2 = 28 个组合的数据,这当然是不够的。利用地球的自转,这些望远镜组合相对于黑洞的方向又在变化,数据增多了。这相当于人在听声音时转动身体用不同角度听。有了这些数据后,剩下的问题是怎么从这些不同探测器距离组合、不同角度的获得的信号数据反推出信号源的分布。这是一个数学与计算(computational)问题。下面我粗略的讲一下相关的数学方法。
下图中,S为信号源,它的不同处以不同的强度向空间发出信号。T1 与 T2 为两个信号接收装置,两者的距离为D。这两个信号接收器收到的是S各处发出的信号的总和。我们的任务是找出收到的信号与S上信号分布的关系而生成 S的“图像”(也就是S上各处信号强度变化图)。数学分析的基本线路是,先找出S上任意一点在两个接收器产生的信号,然后把S上各点的信号加起来(又称积分)。下面虽然图像是一个黑洞假想照,但是相关分析适用于其他应用。
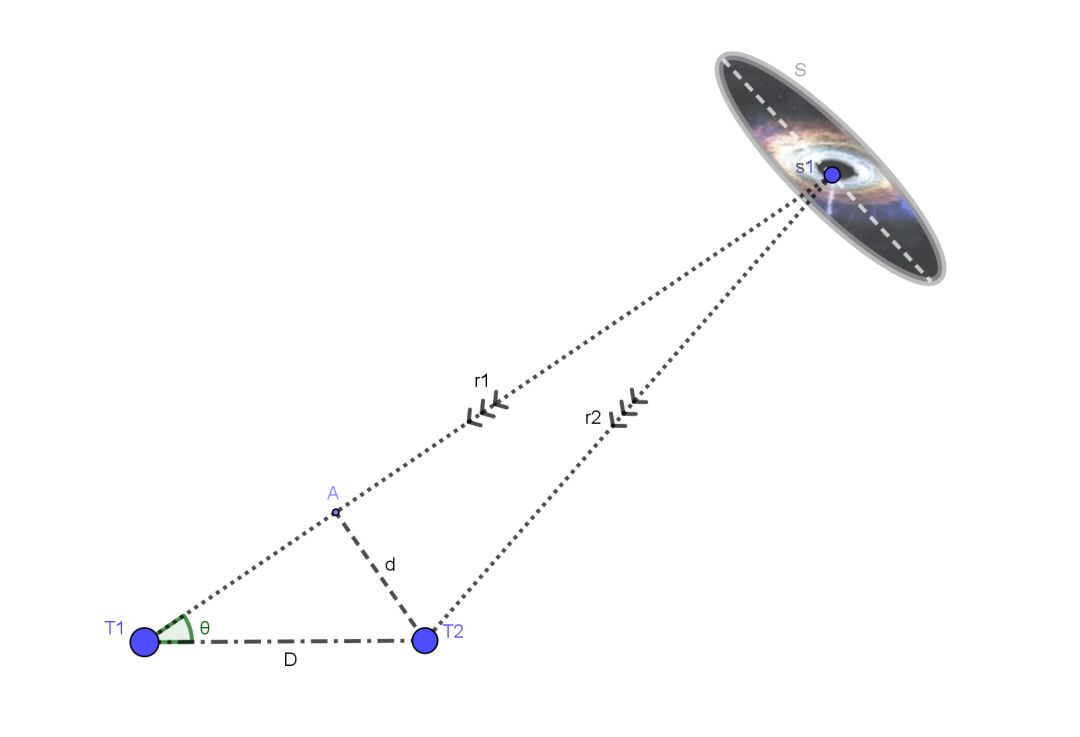
依照上图,我们考虑信号源上某一点 s1 发出的信号波,其数学形式 是 exp(ikr)/rexp(ikr)/r (k=2π/λk=2π/λ)。s1 到 T1 的距离为 r1,到 T2 的距离为 r2。从图中看出,信号达到 T1 要多走一段距离,如果我们假设 r1、r2 远远大于 T1、T2之间的距离,<T2-s1-T2 这个角度接近零,那么 r1−r2=Dcos(θ)r1−r2=Dcos(θ)。T1、T2 两处收到信号的相位差是 这个距离差除以波长λλ乘上 2*pi:2πDcosθ/λ2πDcosθ/λ。把T1/T2 两处的信号相乘并进行时间平均,计算两个信号的交叉相关度,我们得到
I(θ)exp(−ikr1)⋅exp(ikr2)=I(θ)exp(−i2πDcosθ/λ)I(θ)exp(−ikr1)⋅exp(ikr2)=I(θ)exp(−i2πDcosθ/λ)
其实部为:I(θ)cos(2πDcosθ/λ))I(θ)cos(2πDcosθ/λ))
其中 I(θ)I(θ) 是 θθ 方向也就是来自 s1 点处的平均信号强度。知道了 I 随角度的变化就完成了拍照。但我们接收到的信号来自整个信号源,而不是一点。接下来我们要把信号源S各处产生的效果加起来。由于 S 上不同处的信号源是彼此独立的,这只是一个简单的叠加。进一步计算之前,我们假设 S 距离非常遥远,对应的观察角度变化范围非常小。以 M87 为例,从地球观察其展开的角度只有十亿分之一度的量级。如果\theta 为 60度,那么整个 M87 只是在 60度左右十亿分之一的范围变化。设 θ0θ0为信号源中心处的角度,我们引入一个新的变量 αα 来表达这个角度的微小变化,θ=θ0+αθ=θ0+α。这样信号相关量 公式可以得到简化:
I(θ)exp(−i2πDcosθ/λ)=I(θ)exp(−i2πDλcos(θ0+α))≈I(θ)exp(−i2πDλ (cosθ0−sin(θ0) α)=I(θ0+α)e−2πDcosθ0λ exp(i2πDsinθ0λα)I(θ)exp(−i2πDcosθ/λ)=I(θ)exp(−i2πDλcos(θ0+α))≈I(θ)exp(−i2πDλ (cosθ0−sin(θ0) α)=I(θ0+α)e−2πDcosθ0λ exp(i2πDsinθ0λα)
上面的结果中带有一个固定的相差 2πDcosθ0/λ2πDcosθ0/λ,我们可以在计算中人为引进一个与之相反的相差将其抵消。引入 J(α)=I(θ0+α)J(α)=I(θ0+α),我们的信号相关函数简化为:
J(α)cos(2πDsinθ0λ α)J(α)cos(2πDsinθ0λ α)
从这个公式可以看出,T1/T2 组合的有效孔径大小为 Dsinθ0Dsinθ0,也就是图中的 d。其对应角分辨率约为 λ/Dsinθ0λ/Dsinθ0 。
上面是S上一点信号在两个望远镜产生的相关量。而望远镜实际接受的是来自S的全部信号。要把信号源 S 中白线上发出的信号加起来,得就不同的αα 值对上面的式子求和(或者说积分)。引入符号 u=Dsinθ0/λu=Dsinθ0/λ,这个“求和”可以表达为
J(u)=∫αJ(α) ei 2πu αJ(u)=∫αJ(α) ei 2πu α
这个积分在数学上称为 J 的傅里叶变换。怎么从 J(u)J(u) 得到我们需要的 J(α)J(α)呢?数学上这是一个反傅里叶变换 J(α)=∫uJ(u) e−i 2πu α duJ(α)=∫uJ(u) e−i 2πu α du 。要完成这个反向操作,光有一个值是不行的,我们必须知道 J(u)J(u) 随 u 是怎么变的。EHT 由多个射电望远镜两两组合,各个组合形成不同数据,而且随着地球的自转,望远镜连线相对于黑洞方向的角度也在变,这就给出了不同 u 值的 J(u)J(u) 值。有了这些数据,就可以试图完成反向操作得到信号强度随角度的变化,图像就出来了。虽然上面的计算是考虑一维的信号源,但是对于二维信号源来说,方法是完全类似的,结果是二维的傅里叶变换与反变换。
我们就 M87* 的数据说明一下成像的难度。M87 中心黑洞质量约为太阳质量是60亿倍,离地球距离约 5400万光年。一个太阳质量的黑洞视界半径约为 3 千米。因此,M87 黑洞的半径为 180 亿千米。这是180*10^8/3/10^5/3600/24 ~ 0.7 光天 (光一天走的距离)。其观测角度只有 2* 0.7/5400/10000/365 * 180/3.14 ~ 4 * 10 ^(-9) 度,或者说 10亿分之4度。西方文明具有惊人的传承性,他们还在使用古巴比伦的天文单位--弧秒。1弧分等于 1/60 度,1 弧秒等于 1/60 弧分(或者说 1/3600 度)。因此,M87 黑洞的视界角度只有 4 * 3.6 微弧秒。黑洞周围的“光环”半径约为视界半径的 2.6 倍,因此光环的观测角度为 约 10亿分之10度,或者约40 微弧秒。EHT 观测波长为 1.3 毫米左右,两台望远镜之间距离约 10000 km,分辨率约为 1.3/10000/1000/1000 * 180/3.14 = 10亿分之 7 度。两者相比,EHT 刚刚能够看出点名堂。如果大家觉得 照黑洞片略显模糊,要知道这已经是对数据已经进行了很多的智能优化处理。
为什么中国贵州500直径的FAST射电望远镜没有参加 EHT 研究呢?如果你看 FAST 的照片,可以发现它的天线反射抛物面是金属网格的,网格大小约10厘米,所以微米的电波直接穿过去了,FAST不能在 EHT 这么高的频率工作。另外,EHT各射电望远镜距离遥远,信号不能直接连线合成,只能把接收到的信号及其精确时间存到硬盘,最后才能集中到一起进行数据处理,这也得需要辅助设备与相当的准备工作。
怎么提高分辨率?中国据说在筹划天琴计划,把射电望远镜装在多颗卫星上,这样它们之间的距离可以大大增加,同时又避免了大气干扰。EHT 十多年磨一剑,投入数千万美元。天琴可能得投入数亿美元,但它也许能给人类带来对宇宙更为深层的认识与理解。
未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”


)
-基础入门之事件总线与动态组件)






)
编程踩坑集锦)



产业链全分析)




