先来彻底搞懂PID到底是啥?
PID,就是“比例(proportional)、积分(integral)、微分(differential)”,是一种很常见的控制算法。在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
PID已经有107年的历史了,它并不是什么很神圣的东西,大家一定都见过PID的实际应用。比如四轴飞行器,再比如平衡小车......还有汽车的定速巡航、3D打印机上的温度控制器....来看下通过PID实现机器人骑自行车的文章:应用PID控制,让机器人学会骑自行车。
就是类似于这种:需要将某一个物理量“保持稳定”的场合(比如维持平衡,稳定温度、转速等),PID都会派上大用场。
那么问题来了:比如,我想控制一个“热得快”,让一锅水的温度保持在50℃。这么简单的任务,为啥要用到微积分的理论呢。
你一定在想:这不是so easy嘛~!小于50度就让它加热,大于50度就断电,不就行了?几行代码用Arduino分分钟写出来。
没错,在要求不高的情况下,确实可以这么干!如果换一种应用场景,你就发现有问题了:
如果我的控制对象是一辆汽车呢?要是希望汽车的车速保持在50km/h不动,你还敢这样干么。
所以,在大多数场合中,用“开关量”来控制一个物理量,就显得比较简单粗暴了。有时候,是无法保持稳定的。因为单片机、传感器不是无限快的,采集、控制需要时间。
而且,控制对象具有惯性。比如你将一个加热器拔掉,它的“余热”(即热惯性)可能还会使水温继续升高一小会。
这时,就需要一种『算法』:
它可以将需要控制的物理量带到目标附近
它可以“预见”这个量的变化趋势
它也可以消除因为散热、阻力等因素造成的静态误差
....
于是,当时的数学家们发明了这一历久不衰的算法——这就是PID。
你应该已经知道了,P,I,D是三种不同的调节作用,既可以单独使用(P,I,D),也可以两个两个用(PI,PD),也可以三个一起用(PID)。关于PID原理应用的文章:PID控制在无人机中的应用。
这三种作用有什么区别呢?客官别急,听我慢慢道来
我们先只说PID控制器的三个最基本的参数:kP,kI,kD。
kP
P就是比例的意思。它的作用最明显,原理也最简单。我们先说这个:
需要控制的量,比如水温,有它现在的『当前值』,也有我们期望的『目标值』。
当两者差距不大时,就让加热器“轻轻地”加热一下。
要是因为某些原因,温度降低了很多,就让加热器“稍稍用力”加热一下。
要是当前温度比目标温度低得多,就让加热器“开足马力”加热,尽快让水温到达目标附近。
这就是P的作用,跟开关控制方法相比,是不是“温文尔雅”了很多。
实际写程序时,就让偏差(目标减去当前)与调节装置的“调节力度”,建立一个一次函数的关系,就可以实现最基本的“比例”控制了。
kP越大,调节作用越激进,kP调小会让调节作用更保守。
要是你正在制作一个平衡车,有了P的作用,你会发现,平衡车在平衡角度附近来回“狂抖”,比较难稳住。
如果已经到了这一步,离成功只差一小步了。
kD
D的作用更好理解一些,所以先说说D,最后说 I。
刚才我们有了P的作用。你不难发现,只有P好像不能让平衡车站起来,水温也控制得晃晃悠悠,好像整个系统不是特别稳定,总是在“抖动”。
你心里设想一个弹簧:现在在平衡位置上。拉它一下,然后松手。这时它会震荡起来。因为阻力很小,它可能会震荡很长时间,才会重新停在平衡位置。
请想象一下:要是把上图所示的系统浸没在水里,同样拉它一下 :这种情况下,重新停在平衡位置的时间就短得多。
我们需要一个控制作用,让被控制的物理量的“变化速度”趋于0,即类似于“阻尼”的作用。
因为,当比较接近目标时,P的控制作用就比较小了。越接近目标,P的作用越温柔。有很多内在的或者外部的因素,使控制量发生小范围的摆动。
D的作用就是让物理量的速度趋于0,只要什么时候,这个量具有了速度,D就向相反的方向用力,尽力刹住这个变化。
kD参数越大,向速度相反方向刹车的力道就越强。
如果是平衡小车,加上P和D两种控制作用,如果参数调节合适,它应该可以站起来了。等等,PID三兄弟好想还有一位。看起来PD就可以让物理量保持稳定,那还要I干嘛?
因为我们忽视了一种重要的情况。
kI
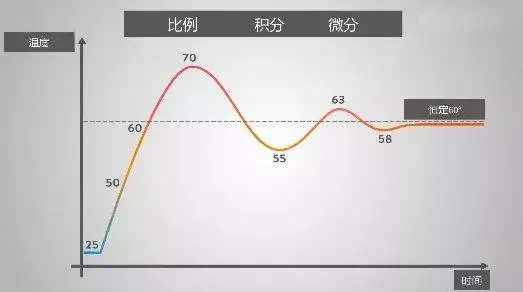
还是以热水为例。假如有个人把我们的加热装置带到了非常冷的地方,开始烧水了。需要烧到50℃。在P的作用下,水温慢慢升高。直到升高到45℃时,他发现了一个不好的事情:天气太冷,水散热的速度,和P控制的加热的速度相等了。
这可怎么办?
P兄这样想:我和目标已经很近了,只需要轻轻加热就可以了。
D兄这样想:加热和散热相等,温度没有波动,我好像不用调整什么。
于是,水温永远地停留在45℃,永远到不了50℃。
作为一个人,根据常识,我们知道,应该进一步增加加热的功率。可是增加多少该如何计算呢?
前辈科学家们想到的方法是真的巧妙:设置一个积分量。只要偏差存在,就不断地对偏差进行积分(累加),并反应在调节力度上。
这样一来,即使45℃和50℃相差不太大,但是随着时间的推移,只要没达到目标温度,这个积分量就不断增加。系统就会慢慢意识到:还没有到达目标温度,该增加功率啦!到了目标温度后,假设温度没有波动,积分值就不会再变动。这时,加热功率仍然等于散热功率。但是,温度是稳稳的50℃。
kI的值越大,积分时乘的系数就越大,积分效果越明显。
所以,I 的作用就是,减小静态情况下的误差,让受控物理量尽可能接近目标值。
I 在使用时还有个问题:需要设定积分限制。防止在刚开始加热时,就把积分量积得太大,难以控制。
PID到底怎么调?
PID参数调整口诀:
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低四比一
一看二调多分析,调节质量不会低
若要反应增快,增大P减小I
若要反应减慢,减小P增大I
如果比例太大,会引起系统震荡
如果积分太大,会引起系统迟钝







-----转)



)



贝塞尔曲在路径规划的运用,机器运动控制常用)




