bios是如何苏醒的
bios其实一直睡在某个地方,直到被唤醒……前面热火朝天的说了bios的功能和内存布局,似乎还没说到正题上,bios是如何启动的呢。因为bios是计算机上第一个运行的软件,所以它不可能自己加载自己,由此可以知道,它是由硬件加载的。那这个硬件是谁呢?其实前面已经提到过了,相当于是只读存储器ROM,因为它一直就睡在那里不动。
大家知道,只读存储器中的内容是不可擦除的,也就是它不像动态随机访问存储器DRAM那样,掉电后,里面的数据就会丢失。这种存储介质是用来存储一成不变的数据,当数据写进去后,便与日月同辉,庭前坐看花开花落,不朽于天地万物之间,哈哈,有点夸张了。
bios代码所做的工作也是一成不变的,而且在正常情况下,其本身是不需要修改的,平时听说的那些主板坏了要刷bios属于例外。于是bios顺理成章地便被写进此ROM。ROM也是块内存,内存就需要被访问。此ROM被映射在低端1M内存的顶部,即地址0xF0000~0xFFFFF处,可以参考表1-1顶部的bios部分。只要访问此处的地址便是访问了bios,这个映射是由硬件完成的。
bios本身是个程序,程序要执行,就要有个入口地址才行,此入口地址便是0xFFFF0。最重要的一点来了,知道了bios在哪里后,cpu如何去执行它,即cpu中的cs:ip值是如何组合成0xFFFF0的。如果大家不了解内存的分段访问机制,可以参考第0章,里面有讲解cpu为什么分段方式内存。说正事,cpu访问内存是用段地址+偏移地址来实现的,由于在实模式之下,段地址需要乘以16后才能与偏移地址相加,求出的和便是物理地址,cpu便拿此地址直接用了。这个“段基址:段内偏移地址”的组合是0xffff:0吗?或者是0xF000:0xFFF0?或者是更奇葩一点的组合:0xFEEE:0x1110? 或者您想出的组合比我的还奇葩,好啦,不折磨大家了,还是说正事要紧。既然做为第一个运行的程序都没开始执行,自然就没办法用软件搞定这件事了,还是得靠硬件支持才行。在开机的一瞬间,也就是接电的一瞬间,cpu的cs:ip寄存器被强制初始化为0xF000:0xFFF0。由于开机的时候是处于实模式,再重复一遍加深印象,在实模式下的段基址要乘以16,也就是左移4位,于是0xF000:0xFFF0的等效地址将是0xFFFF0。上面说过了,此地址便是bios的入口地址。当我给出这个地址后,不知道大家意识到什么没有。bios是在实模式下运行的,而实模式只能访问1M空间(20位地址线,2的20次方是1M)。而地址0xFFFF0距1M只有16个字节了(见表1-1除标题外的第一行),这么小的空间够干吗?bios又要检测硬件、做各种初始化工作、还要建立中断向量表……16字节的机器指令肯定干不了这么多事。也许有的同学会问,超过寄存器宽度会怎么样呢?比如0xFFFF0+16,这样就溢出了,由于实模式下的寄存器宽度是16位,0xFFFF0+16已经超过了其最大值0xFFFFF。溢出的部分就会回卷到0,又会重新开始,即0xFFFF0+16等于0,0xFFFF0+17等于1。
既然此处只有16字节的空间了,这只能说明bios真正的代码不在这,那此处的代码只能是个跳转指令才能解释得通了。好,既然心里有了推断,那咱们就来证明这个推断正确与否。下图是我在bochs中抓的图,下面给大家分析一下这图中的信息都代表什么。
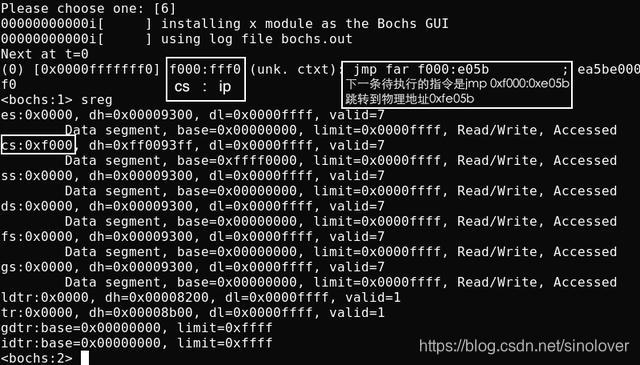
首先得承认,这张图有点超前了,这是在有了MBR后才能抓到的,否则会提示boot failed: not a bootable disk,而我们还没有MBR,还没有写主引导记录。先不管这张图是怎么来的啦,反正大家马上就能够在自己的虚拟机里看到这张图了,大概还有1柱香的工夫,可能是很长的那种香^—^。大家先注意框框中的内容。一共有3个,最上面左边第1个标有cs:ip的那个框,cs寄存器的值是0xf000,ip寄存器的值是0xfff0,也就是段基址0xf000,段内偏移地址0xfff0,这个组合出来的地址便是0xffff0,这是处理器下一条待执行指令的地址。这与上面所说的bios入口地址是吻合的。另外,因为cs和ip寄存器中存储的是下一条要执行的指令,目前还没有执行,也就是说,当前还没有执行bios,这是机器刚开机的那一刻。这一刻还是值得庆祝的,因为即使是计算机行业的同学都很少看到这一刻,何况我们让这一刻停了下来,成为永恒。
按理说,既然让cpu去执行0xFFFF0处的内容(目前还不知道其是指令还是数据),此内容应该是指令才行,否则这地址处的内容若是数据而不是指令,cpu硬是把它当成指令来译码的话,一定会弄巧成拙铸成大错。现在咱们又有了新的推断,物理地址0xFFFF0处应该是指令,继续探索。继续看第二个框框,里面有条指令jmp far f000:e05b,这是条跳转指令,也就是证明了在内存物理地址0xFFFF0处的内容是一条跳转指令,我们的判断是正确的。那cpu的执行流是跳到哪里了呢?段基址0xf000左移4位+0xe05b,即跳向了0xfe05b处,这是bios代码真正开始的地方。
第三个框框cs:f000,其意义是cs寄存器的值是f000,与我们刚刚所说的加电时强制将cs置为f000是吻合的,正确。接下来bios便马不停蹄的检测内存,显卡等外设信息,当检测通过,并初始化好硬件后,开始在内存中0x000~0x3FF处建立数据结构,中断向量表IVT并填写中断例程。
好了,终于到了接力的时刻,这是这场接力赛的第一棒,它将交给谁呢,咱们下回再说。

 - D】Kth Minimum Clique(bfs,tricks))


 - H】Second Large Rectangle(单调栈,全1子矩阵变形))


- F】Partition problem(dfs,均摊时间优化))



- B】Crazy Binary String(思维,01串,前缀和))
深度学习笔记:深度学习的实践层面)

- F】Planting Trees(单调队列,尺取))


- E】MAZE(线段树优化dp,dp转矩阵乘法,线段树维护矩阵乘法))

