图论若干定义
-
图(graph)G=(V,E)由定点vertex的集合V, 和边edge的集合E组成。每一条边都是一个点对点(v,w),其中 v,w 属于V集合的子集
-
如果点对点 是有序的,那么图就是有向图(directed)
-
图中的一条路径Path是定点序列的集合 w1,w2,w3,…wn使得(w(i), w(i+1)) 是边E的子集 其中(1<= i <= N),这样一条路径的长度(length)是该路径上的边数,他等于N-1。从一个点的到他自身可以看成是一条路径,如果路径不包含边,那么路径的长度为0.
-
如果图有一条从一个定点到自身的边(v,v),那么这条路径v,也叫作环(loop)
-
连通图
- 如果一个无向图中从一个顶点到每个其他顶点存在一条路径,则称改无向图是连通图
-
强连通图
- 一个有向的连通图是强连通图
-
基础图
- 如果一个有向图不是强连通图,但是他的有基础的图结构,即其边上去掉方向所成的图是连通的,那么改有向图称为弱连通图
-
完全图
- 若图中每一对顶点之间都存在一条边的,我们称这种图为完全图
-
现实中案例
- 航空系统,每个机场都是顶点,机场之间的航线是边,边可以有权重标识时间,距离费用等。
- 交通流可以用一个图来模型化,每一条街道交叉口标识一个顶点,每一条街道都是一条边。边的值可以代表速度限制,或者容量(车道数量)等。我们可以找一条最短路径或者用改信息找出交通瓶颈最可能的位置。
图的表示(基本数据结构)
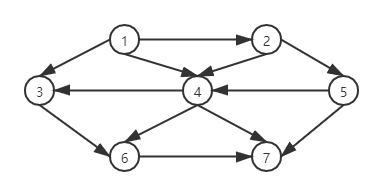
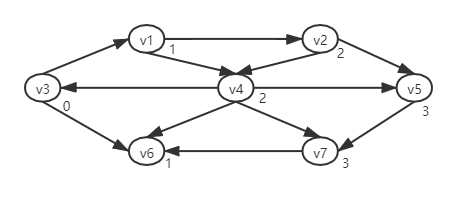
- 我们先用一个案例有向图(无向图类似表示)如图中假设可以从1号顶点编号。图中不表示7个顶点和12条表。
方法一二维数组
- 最简单的数据结构使用一个二维数组标识,称为邻接矩阵(adjacent matrix) 标识法。对于每条边(u,v),设置A[u][v] = true;否则 设置false。如果边有一个权重,那么我们设置A[u][v] = X权重值。例如,我们寻找最廉价的航空线路,那么我们可以用 MXA 无穷大标识不存在航线。如果处于某种原因我们找到最昂贵的路线,那么可以用 -MAX表示不存在的边。
- 以上二维数组的表示方式优点是非常简单,但是空间需求是O(V^2), 如果图的边不是很多,那么这种标识的代价就会非常大,若图是稠密(dense)的:E = O(| V ^ 2|),那么我们用二维数组的邻接矩阵的标识方法是合适的,因为数据结构中每一个位置的值都是有用的值。
- 致命的缺点在于我们现实生活中的案例几乎都是稀疏的数据,例如街道路口,几乎所有街道多的话都只有四个方向东南西北,因此任意路口的标识为节点, 方向标识边,那么E = 4V,如果3000 个路口,3000 个顶点,12000 条边,那么需要3000*3000 的数组,而且数组中大部分元素都是false,因为一个节点只连接附近四个节点,与其他节点的连通数据位false。浪资源
方法二邻接表
-
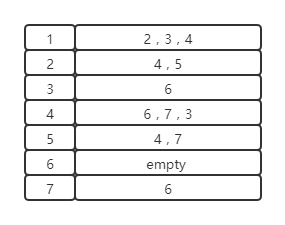
如果图不是稠密的,是稀疏的,则更好的解决方案就是邻接表(adjacency list)表示,对每一个顶点,我们使用一个表存放所有邻接的顶点。这个时候占用的空间是 O(E+ V),他相对于图的大小而言是线性的,这种抽象表示方法我们用如下图表示,很想一个MAP数据接口的样子。如果边有权重,那么我们可以在图节点E中附加信息增加权重信息,存在邻接表中。
-
邻接表是标识图的标准方法。无向图可以类似的标表示,每条边(u,v)出现在两个表中,因此空间的使用基本是双倍的。在图论算法中通常需要找出与某个给定顶点v邻接的所有的顶点。 而这可以通过简单的扫描相应邻接表来完成,用时与这些找到顶点的个数成正比
-
如下代码定义邻接表节点:
/*** 图节点元素* @author liaojiamin* @Date:Created in 16:28 2020/12/28*/
public class Vertex implements Comparable<Vertex> {//图节点出度节点 数组private List<Vertex> vertexList = new ArrayList<>();//图节点入度节点 数组private List<Vertex> insertVertexList = new ArrayList<>();private Integer dist;private boolean know;//目标节点到本节点的上一个节点的 节点信息private Vertex path;private Integer weight;public List<Vertex> getInsertVertexList() {return insertVertexList;}public void setInsertVertexList(List<Vertex> insertVertexList) {this.insertVertexList = insertVertexList;}public Integer getWeight() {return weight;}public void setWeight(Integer weight) {this.weight = weight;}public Vertex getPath() {return path;}public void setPath(Vertex path) {this.path = path;}public List<Vertex> getVertexList() {return vertexList;}public void setVertexList(List<Vertex> vertexList) {this.vertexList = vertexList;}public Integer getDist() {return dist;}public void setDist(Integer dist) {this.dist = dist;}public boolean isKnow() {return know;}public void setKnow(boolean know) {this.know = know;}@Overridepublic int compareTo(Vertex o) {return this.dist - o.dist;}
}
拓扑排序
- 拓扑排序是对有向无圈图的顶点的一种排序,是的如果存在一条从Vi 到Vj的路径,那么在排序中Vj就出现在Vi的后面,如下图中,有向边(v,w)表示在v必须先比w 先完成。如果图中含有圈,那么拓扑排序是不可能存在的,因为对圈上的任何两个顶点v,w,v先于w同时也需要满足w先于v。此处拓扑排序不必是惟一的;任何合理的排序都是合理的。如下图所示:
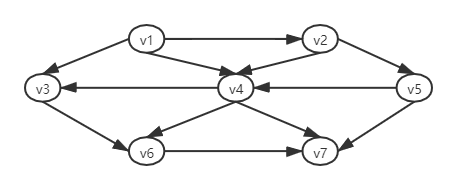
- 图中v1,v2,v5,v4,v3,v6,v7和v1,v2,v5,v4,v7 两个都是拓扑排序
拓扑排序算法分析
- 一个简单的拓扑排序算法
- 先找出任意一个没有入边的顶点
- 显示出改顶点
- 将他及其边一起从图中删除
- 对图中其余部分同样用这种方法处理。
- 实现方式如下:
/*** 图论 求拓扑排序算法* @author liaojiamin* @Date:Created in 14:56 2021/1/6*/
public class GraphTopLogicalSort {//节点定义:Vertex//图节点相邻节点组// private List<Vertex> vertexList = new ArrayList<>(); 存储节点出度节点// private List<Vertex> insertVertexList = new ArrayList<>(); 存储节点入度节点// private Integer dist; 存储节点拓扑编号//假设图基本数据结构已经被读入邻接表中private static final List<Vertex> vertices = new ArrayList<>();/*** 寻找入度为0 的图节点* */public Vertex findNewVertexOfIndegreeZero(){Vertex insetZeroVertex = null;for (Vertex vertex : vertices) {if(vertex.getInsertVertexList().size() <= 0){insetZeroVertex = vertex;}}//节点入度,出度都为0 ,删除节点信息if(insetZeroVertex != null && insetZeroVertex.getVertexList().size() <= 0){vertices.remove(insetZeroVertex);}return insetZeroVertex;}/*** 拓扑排序算法* */public void topSort(){for (int i = 0; i < vertices.size(); i++) {Vertex v = findNewVertexOfIndegreeZero();if(v == null){//每个节点都有入度,说明是有圈return;}v.setDist(i);for (Vertex vertex : v.getVertexList()) {//更新V节点相邻节点中所有信息vertex.getVertexList().remove(v);}}}
}- 以上实现方式中,findNewVertexOfIndegreeZero方法是对顶点数组的一个遍历,所有每次对他的调用都会花费O(V)的世界,由于有V次这样的调用,所有算法时间复杂度为O(V^2)
- 优化方式:邻接表标识图的方式注定他是稀疏的,因此我们每次去更新节点的入度的时候只有少部分节点需要更新,也久只有少部分节点的入度将变为0 ,此时我们通过扫描所有数据的方式来查找入度为 0 的代价太大
- 我们可以用一个队列或者栈来存储入度为 0 的节点,对每个顶点计算入度后然后将入度为0 的节点天界到队列,当队列不为空,就删除顶点V并将对应邻接节点入度减去v,这样拓扑排序的顺序就是出队列的顺序。
- 代码实现如下:
/*** 优化拓扑算法* */public void topSort_v1(){List<Vertex> insertZeroVertex = new ArrayList<>();insertZeroVertex.add(findNewVertexOfIndegreeZero());int i = 0;while (insertZeroVertex.size() > 0){Vertex v = insertZeroVertex.remove(0);v.setDist(i++);for (Vertex vertex : v.getVertexList()) {//减少入度vertex.getInsertVertexList().remove(v);if(vertex.getInsertVertexList().size() <= 0){//将入度为0 的节点加入队列insertZeroVertex.add(vertex);}}}}
最短路径算法
- 最短路径算法是在赋权图的情况下使用:与每条边(vi,vj)想联系的是穿越改边的代价(权重)Cij。一条路径v1v2v3v4…vn的值叫做赋权路径长度(weighted path length),而无权路径长(unweighted path length)只是路径上边的数量,即N-1。
单源最短路径问题
-
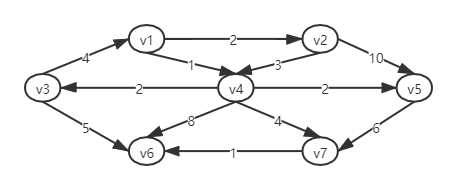
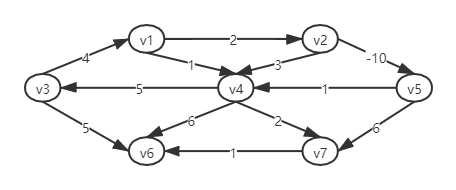
给定一个赋权图G= (V,E)和一个特定顶点s作为输入,找出s到G中每一个其他顶点的最短赋权路径。如下案例
-
从v1到v6的最短赋权路径的值为6,他是从v1 到 v4 到v7 在到v6的路径。在这两个顶点之间的最短无权路径长度为2.一般说,当不指名我们讨论的是赋权路径还是无权路径时候,如果图是赋权的那就是赋权路径。还有上图中从v6 到v1 是无路径的。
负圈值
- 以上案例中,如果存在负数的权重那么会有问题如下图。从v5 到v4 的路径值为1,但是通过下面的循环v5,v4,v2,v5,v4存在一条更短的路径,他的值是-5.这条路径任然不是最短的,因为我们可以循环中不断的重复。因此这两个顶点之间最短路径问题是不确定的。类似v1, 到v6的最短路径也是不确定的。这种情况就叫做负圈值
- 当图中存在负圈值,最短路径问题是不确定的,有负的边增加问题难度
四种最短路径目标
- 首先开了无权最短路径问题并指出如何以O(E+V)的时间复杂度求解
- 无负边情况先求解赋权最短路径,使用合理数据结构实现运行时间在O(ElogV)
- 有负边情况,提供解决方案,时间复杂度O(E*V)
- 以线性时间解决无圈图特殊情况的赋权问题
无权最短路径
- 如下图表示一个无权图G,使用某个顶点s作为输入参数我们要找出从s到所有其他顶点的最短路径。因为是无权所有我们只需要关注边,我们将他当成是权重为1 的赋权问题。
- 算法分析
- 选择s为v3,次数立刻可以看出s到v3的最短路径是0 ,到自己接的是无距离的。标记如图
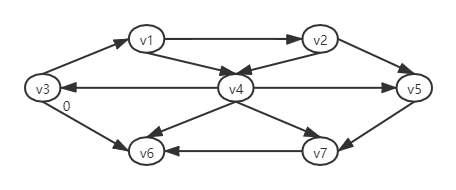
- 接着寻址与s相邻的节点,即s出发距离为1 的节点。这些顶点可以通过查询与s节点的领接节点数组来找到。我们看到v1和v6与s相邻,如下图:
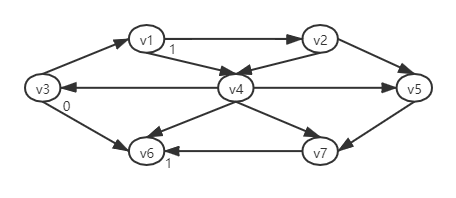
- 同理继续寻址邻接到v1和v6的顶点,显然是v2,v4,他们到v3的最短路径是2:
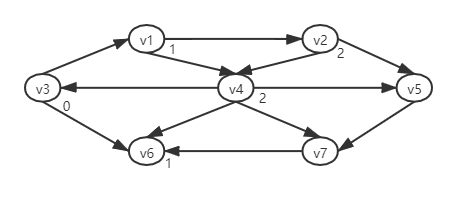
- 最后通过v2,v4的邻接节点找到v5,v7各有一条3的最短路径:
-
以上搜索图的方法称为广度优先搜索(breadth-first search)。按层处理顶点:距离开始最近的那些顶点首先被求值,最远的顶点最后被求值。这很像树的层序遍历(level-order traversal)。
-
算法分析
- 对每个顶点跟踪三个信息,首先将从s开始到顶点的距离dist记录为0,因为s到自身的距离是0
- 顶点s的path属性记录为null这个变量用来标记我们能够显示出的实际路径
- know变量标记为false,标识他是否被处理过,处理过后标记为true,保证不会重复处理而导致更长的路径,因为按广度优先原则,首先处理的路径一定是对短的路径。
- 算法流程将dist = 0 上的顶点声明为know,接着,dist = 1 上的顶点声明为know,在dist = 2的know,依次类推,并且每一步骤将上一步骤节点存储在Path中
- 我们通过追溯Path遍历,可以显示实际的路径:如下代码实现:
/*** 最短路径算法* @author liaojiamin* @Date:Created in 16:29 2020/12/28*/
public class GraphShotLine {//图节点数组private static final List<Vertex> vertexVraph = new ArrayList<>();private static final Integer MAX_DIST = Integer.MAX_VALUE;/*** 递归打印路径* */public void printPath(Vertex v){if(v.getPath() != null){printPath(v.getPath());}System.out.println(v);}/*** 无权重图最短路径算法 解法一* 时间复杂度O(V^2)* */public void unweighted(Vertex s){for (Vertex vertex : vertexVraph) {vertex.setDist(MAX_DIST);vertex.setKnow(false);}s.setDist(0);Integer NUM_VERTICES = vertexVraph.size();//遍历从 0 ~ MAX 距离的距离范围内所有节点到目标节点的距离,默认最差是链式,距离是NUM_VERTICESfor (Integer i = 0; i < NUM_VERTICES; i++) {for (Vertex vertex : vertexVraph) {if(!vertex.isKnow() && vertex.getDist() == i){vertex.setKnow(true);for (Vertex sunVertex : vertex.getVertexList()) {if(sunVertex.getDist() == MAX_DIST){sunVertex.setDist(i + 1);sunVertex.setPath(vertex);}}}}}}}
- 如上代码实现中双重for循环,时间复杂度O(v^2).一个明显的效率低下的地方在于,在for循环还未结束的时候,其实已经将所有节点都已经编辑为know,但是循环还在继续。直到所有节点都被遍历一次为止。
- 优化方式,我们可以用类似对拓扑排序的做法来避免这种双重循环,最简单的方式我们将即将要处理的节点放入队列中,然后依次从队列中取出来处理:
- 当处理s节点的时候,将s设置know,将s添加到有序队列
- 将出队列第一个节点,此时是s节点,将s邻接节点的dist+1,并且将所有邻接节点如队列
- 持续上面两个步骤,知道队列中的节点为空为止
- 如下代码实现:
/*** 最短路径算法二* @author liaojiamin* @Date:Created in 16:29 2020/12/28*/
public class GraphShotLine {//图节点数组private static final List<Vertex> vertexVraph = new ArrayList<>();private static final Integer MAX_DIST = Integer.MAX_VALUE;/*** 递归打印路径* */public void printPath(Vertex v){if(v.getPath() != null){printPath(v.getPath());}System.out.println(v);}/*** 无权重图最短路径算法 解法二* */public void unweighted_1(Vertex s){for (Vertex vertex : vertexVraph) {vertex.setDist(MAX_DIST);vertex.setKnow(false);}s.setDist(0);LinkedList<Vertex> sunVertexList = new LinkedList<>();sunVertexList.addFirst(s);while (!sunVertexList.isEmpty()){Vertex sunVertex = sunVertexList.getFirst();sunVertexList.removeFirst();for (Vertex vertex : sunVertex.getVertexList()) {if(vertex.getDist() == MAX_DIST){vertex.setDist(sunVertex.getDist() +1);vertex.setPath(sunVertex);sunVertexList.addLast(vertex);}}}}
}
- 使用拓扑排序的方式处理最短路径问题,只要使用的是邻接表运行时间就是O(E+V)
Dijkstra算法
- 如果图是有权重图,那么问题会更复杂一点,但是算法还是可以通用。我们还是保留之前的图节点结构。
- 解决单源最短路径问题一般嘴阀叫做Dijkstra算法(Dijkstra`s algorithm)。这个有很多年历史的解决方法是贪婪算法(greedy algorithm)最好的案例。贪婪算法一般是分阶段求解一个问题,在每个节点他都把出现的当作是最好的方法。
- Dijkstra算法按阶段进行,和无权最短路径算法一样。每个阶段Dijkstra算法选择一个顶点v,他在所有unknow顶点中具有最小的dist,同时算法声明从s到v的最短路径是known的。阶段的其余部分由dith的更新工作组成。
- 在无权的情况下,如果dist_w = +Max(无穷大) 那么设置dist_w = dist_v + 1。因此如果顶点v能提供一条更短的路径,则我们本质上降低了dist_w的值。
- 如果我们对赋权的情况也用这个逻辑,那么当dist_w的新值dist_v+ C_vw,是一个更小的值,那么我们就设置dist_w = dist_v + V_vw
- 总的来说使用通过w节点的路径上的顶点v是不是一个最优解取决于算法,原始的dist_w 是不使用v的值的,以上所有算出的值是使用v值后的最短路径
算法分析
- 依然按照之前的案例,如下图中,设开始节点s是v1,第一个选择的顶点是v1,路径长度 0 ,标记v1为known,即v1是known的,那么其他的节点的dist值就需要调整,邻接到v1的节点v2, v4 两个调整

- v2, v4 跳转之后的节点情况如下表格所示
| v | knwn | dist | path |
|---|---|---|---|
| v1 | T | 0 | null |
| v2 | F | 2 | v1 |
| v3 | F | MAX | null |
| v4 | F | 1 | v1 |
| v5 | F | MAX | null |
| v6 | F | MAX | null |
| v7 | F | MAX | null |
- 下一步选取v4, 因为v4.dist < v2.dist,标记v3的known = true, 顶点v3, v5,v6,v7,是邻接顶点,他们的实际值需要调整,如下图所示:
| v | knwn | dist | path |
|---|---|---|---|
| v1 | T | 0 | null |
| v2 | F | 2 | v1 |
| v3 | F | 3 | v4 |
| v4 | T | 1 | v1 |
| v5 | F | 3 | v4 |
| v6 | F | 9 | v4 |
| v7 | F | 5 | v4 |
- 接着选取v2, 只有v4 ,v5是他邻接的顶点,但是v4已经是known我们不做处理,v5 邻接节点我们继续刚才那个步骤 ,那么dist = v2.dist + V_25 = 2+10 =12,显然12 >3 ,因为v5 的最短路径现有的是3 所以,12 不是最优解,v5 保留现在的值不变。
| v | knwn | dist | path |
|---|---|---|---|
| v1 | T | 0 | null |
| v2 | T | 2 | v1 |
| v3 | F | 3 | v4 |
| v4 | T | 1 | v1 |
| v5 | F | 3 | v4 |
| v6 | F | 9 | v4 |
| v7 | F | 5 | v4 |
- 下一个被选取的是v5,因为v5 是剩下unknown节点中dist最小的一个,那么v7 是他的邻接节点,同样算法,v7 = 3+6 >5,所有保留原来最优值,5 不变,接着v3,还是应为他是dist最小值,v3邻接节点v6 ,dist = 3+5 = 8 < 9,将v6 的dist下调到8 ,最后结果如下图:
| v | knwn | dist | path |
|---|---|---|---|
| v1 | T | 0 | null |
| v2 | T | 2 | v1 |
| v3 | T | 3 | v4 |
| v4 | T | 1 | v1 |
| v5 | T | 3 | v4 |
| v6 | F | 8 | v3 |
| v7 | F | 5 | v4 |
- 接着继续选v7 ,邻接节点v6 下调到5+1 =6,得到如下:
| v | knwn | dist | path |
|---|---|---|---|
| v1 | T | 0 | null |
| v2 | T | 2 | v1 |
| v3 | T | 3 | v4 |
| v4 | T | 1 | v1 |
| v5 | T | 3 | v4 |
| v6 | F | 6 | v7 |
| v7 | T | 5 | v4 |
- 最后选v6,
| v | knwn | dist | path |
|---|---|---|---|
| v1 | T | 0 | null |
| v2 | T | 2 | v1 |
| v3 | T | 3 | v4 |
| v4 | T | 1 | v1 |
| v5 | T | 3 | v4 |
| v6 | T | 6 | v7 |
| v7 | T | 5 | v4 |
- 依据以上算法分析我们可以从某个顶点v开始到某顶点w的实际路径,可以编写一个递归案例跟踪Path变量的值来得到最短路径,如下代码实现:
/*** 最短路径算法* @author liaojiamin* @Date:Created in 16:29 2020/12/28*/
public class GraphShotLine {//图节点数组private static final List<Vertex> vertexVraph = new ArrayList<>();private static final Integer MAX_DIST = Integer.MAX_VALUE;/*** 递归打印路径* */public void printPath(Vertex v){if(v.getPath() != null){printPath(v.getPath());}System.out.println(v);}/*** 有权重图最短路径算法* */public void dijkstra(Vertex s){for (Vertex vertex : vertexVraph) {vertex.setDist(MAX_DIST);vertex.setKnow(false);}s.setDist(0);LinkedList<Vertex> sunVertexList = new LinkedList<>();sunVertexList.addFirst(s);while (sunVertexList.size() > 0){//每次取第一个最小值Vertex smallVertex = sunVertexList.removeFirst();smallVertex.setKnow(true);//保存需要添加的新节点LinkedList<Vertex> newVertexList = new LinkedList<>();for (Vertex vertex : smallVertex.getVertexList()) {if(!vertex.isKnow()){Integer cvw = vertex.getWeight();if(smallVertex.getDist() + cvw < vertex.getDist()){vertex.setDist(smallVertex.getDist() + cvw);vertex.setPath(smallVertex);//处理过的节点才是之后可能的路径newVertexList.add(vertex);}}}//将可能的路径按从小到大顺序加入有序队列sunVertexList.addAll(getSortVertex(newVertexList));}}/*** 对子节点列表进行从小到大排序* */public LinkedList<Vertex> getSortVertex(List<Vertex> vertexs){if(vertexs.size() <= 0){return null;}for (int i = 0; i < vertexs.size(); i++) {for(int j = i;j > 0;j--){if(vertexs.get(j-1).compareTo(vertexs.get(j)) > 0 ){Vertex vertex = vertexs.get(j-1);vertexs.set(j-1, vertexs.get(j));vertexs.set(j, vertex);}}}return new LinkedList<>(vertexs);}}
- 如上算法中,每次节点w的举报变化时候,将w和新值d_w插入到队列中,这样对优先队列中的每个顶点就可能有多个对象在队列中,当我们deletedMin(出队列首元素)操作将最小的顶点从队列中删除,必须坚持是否是known,如果是就忽略不处理,接着执行下一次deleteMin。
- 算法的队列最大可能达到E (所有节点集合)这么多。由于E<=V^2,那么logE <= 2logv,因此并不影响时间界限
上一篇:数据结构与算法–B树原理及实现
下一篇:数据结构与算法–图论-最短路径算法应用








![[C++STL]C++ 实现map容器和set容器](http://pic.xiahunao.cn/[C++STL]C++ 实现map容器和set容器)

)


)


![[C++STL]C++实现unordermap容器和unorderset容器](http://pic.xiahunao.cn/[C++STL]C++实现unordermap容器和unorderset容器)


