开发四年只会写业务代码,分布式高并发都不会还做程序员? >>> 
大家好,很开心在这里宣布 YodaOS开源了。他将承载 Rokid 4年以来对于人工智能和语音交互领域的沉淀,并选择 Node.js 作为操作系统的一等开发公民,全部开放给社区。
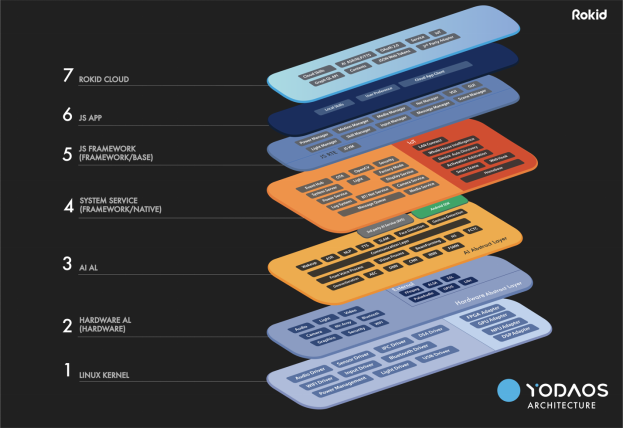
YodaOS(YODAOS)的架构跟 Android 类似,从下至上,由 Linux Kernel、系统服务和应用框架组成。不过 YodaOS 有以下不同:
开发者可以直接使用 JavaScript / Node.js 来开发本地应用(技能);
封装了 AI 抽象层,可以通过 JavaScript 直接调用到诸如语音激活、语音识别、人脸识别等接口;
除了支持默认的 Node.js API 外,YodaOS 还提供:
内置的语音激活和语音识别 API,真正做到了开箱即用(开发)的语音交互系统;
对音量控制、电源管理、蓝牙、多媒体播放、LED 灯效和 OTA 等都进行了接口封装;
对物联网开发者来说,内置了标准化的 WebSocket、MQTT 等物联网协议的客户端实现;
YodaOS 也支持 npm 仓库,开发者可以根据自己的需要在 OS 中运行所需的模块,不过并不推荐使用一些实现起来很重的模块,因为 YodaOS 需要支持中低端设备,所以有时候也需要考虑到性能方面的因素。
如果遇到一些 npm 仓库确实实现很重,但又不得不用的时候,在 YodaOS 上,我们一般的做法是使用 N-API 桥接 C/C++ 模块,然后保证 JavaScript API 与对应的 npm 包一致。
同时借助于 N-API,开发者可以将任何 Linux 的库移植到 YodaOS上,并通过 N-API 以 JavaScript API 方式使用,可以这么理解,N-API 之于 YodaOS,就像 JNI 之于 Android。
为什么是 Node.js
前面提到了 YodaOS 选择拥抱 Node.js和 Node.js 开发者,最大的一个原因就是在过去将近10年的时间,从最开始 Ryan Dahl 定义的,一个轻量级的 Web 服务器框架,到如今的 Express、Loopback、Koajs、Midway 和 Egg Framework,在 Web 服务器框架领域已经渐渐成熟。
依托于 Node.js 提供的运行时,从 Grunt、Gulp 到现在的 Webpack和 Parcel,在构建工具领域,社区也不断涌现出非常卓越的开源项目来。Node.js 正在发挥每位开发者的想象力,社区中几乎有你需要的一切,甚至于在社区中,有一句流传已久的名言:
“any application that can be written in JavaScript,will eventually be written in JavaScript” —— Atwood’s Law
意思就是说,只要能被 JavaScript 来编写的程序,终将使用 JavaScript 实现。那为什么不用 JavaScript 来写一个操作系统呢?
当然上面的只是一个有趣的引子,Rokid 真正想做的是让 Node.js 开发者能够以更低的门槛进入语音交互和嵌入式领域。
Node.js 与 ShadowNode
YodaOS 虽然跟 Android 的架构相似,不过解决的问题,及目标设备并不尽然相同,对于现在越来越便宜的手机,Android 开发者几乎不用担心系统性能的问题。然而对于像智能音响、IoT 终端以及其他嵌入式设备,通常硬件资源都是非常紧缺的,在这种情况下,OS 就要解决开发者“既要节省资源、又要便于开发”的问题。
于是针对中低端硬件产品(内存介于 128MB 到 256MB 之间),我们创造了 ShadowNode来解决这个问题,它是 Rokid 基于三星 IoT.js 二次开发的一款 Node.js 运行时,它具备更快的启动速度和更低的资源占用,相比 IoT.js,它:
提供了更好的错误栈信息和性能调试工具;
支持了基于 N-API 的跨运行时模块执行;
针对特定芯片的性能优化,比如 AmLogic A113和 Kamino18;
借助于 N-API的 ABI 兼容特性,我们实现了 OS 上层框架和应用的运行时兼容性。比如开发者完全可以选择在更高级的设备上运行 YodaOS,此时内存和 Flash 不再是瓶颈,开发者只需要更换系统中的 Node.js 运行时,即可获得更快的执行速度,不需要修改一行上层代码。
最后
我们希望借助 YodaOS,为 Node.js 社区补全终端开发这一版图,让我们用这门亲切的语言,再次回到我们熟悉的“端”的开发。
如果想一起加入 YodaOS,可以在 GitHub 上关注我们,项目地址:https://github.com/yodaos-project/yodaos。
















![[洛谷P4174][NOI2006]最大获利](http://pic.xiahunao.cn/[洛谷P4174][NOI2006]最大获利)


