目录
- 引出
- 1.导入工序
- 2.修改刀具
- 其他刀具参数
- 3.进行工序分配
- 4.设置TCP
- 5.设置工作站
- 6.工序整体导入配置
- 7.进行计算
- 总结
引出
RobotMaster的操作流程,从导入工序到生产轨迹。
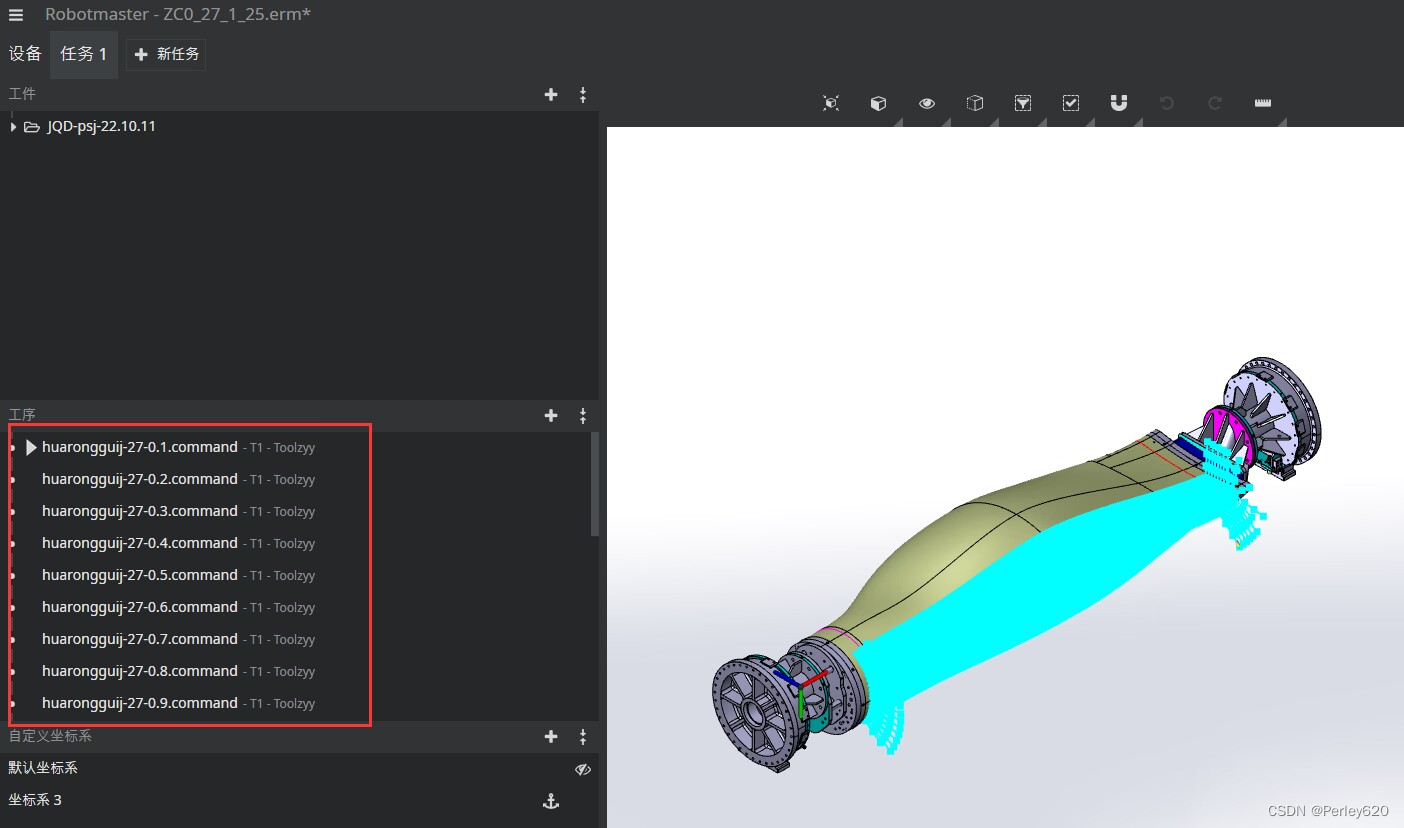
1.导入工序
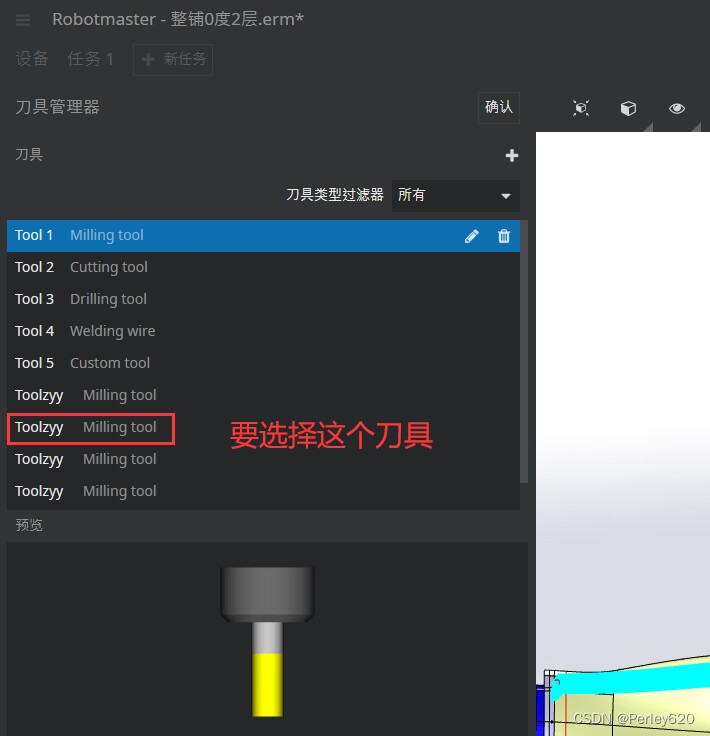
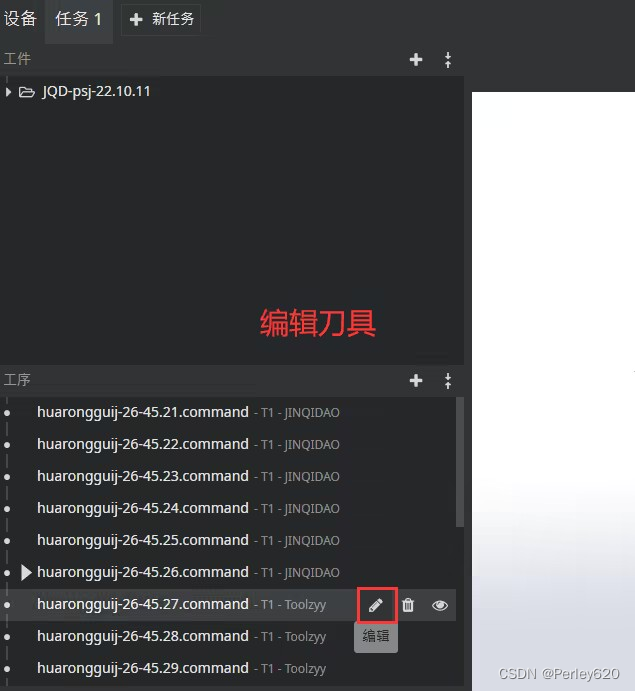
2.修改刀具
要选择第七把刀具
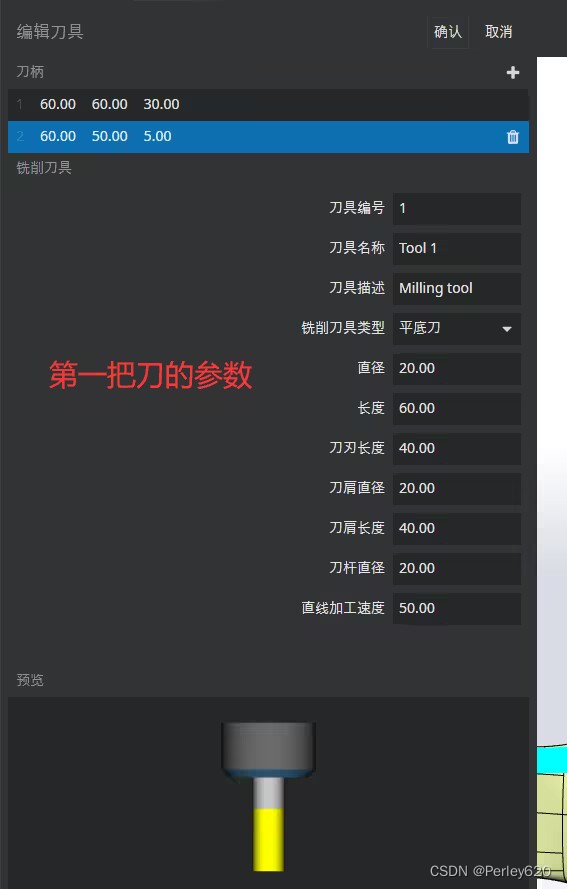
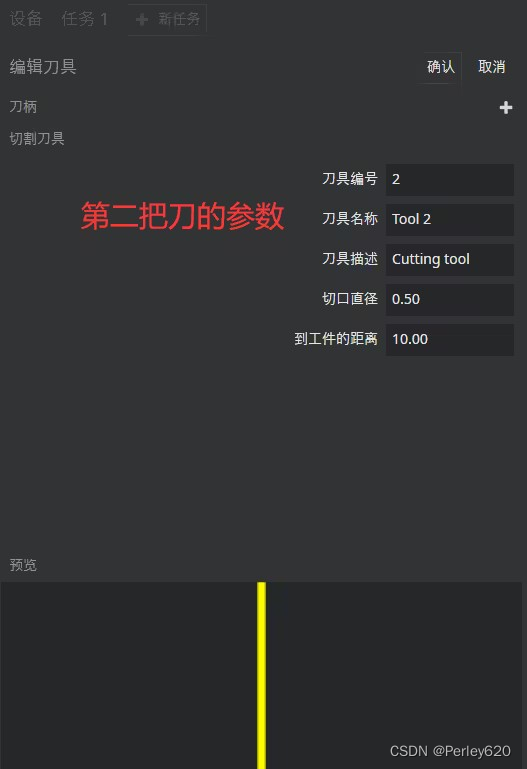
其他刀具参数
第一把刀具
第二把刀具
第三把刀具

第四把刀具

第五把刀具

第6把刀具

第7把刀具

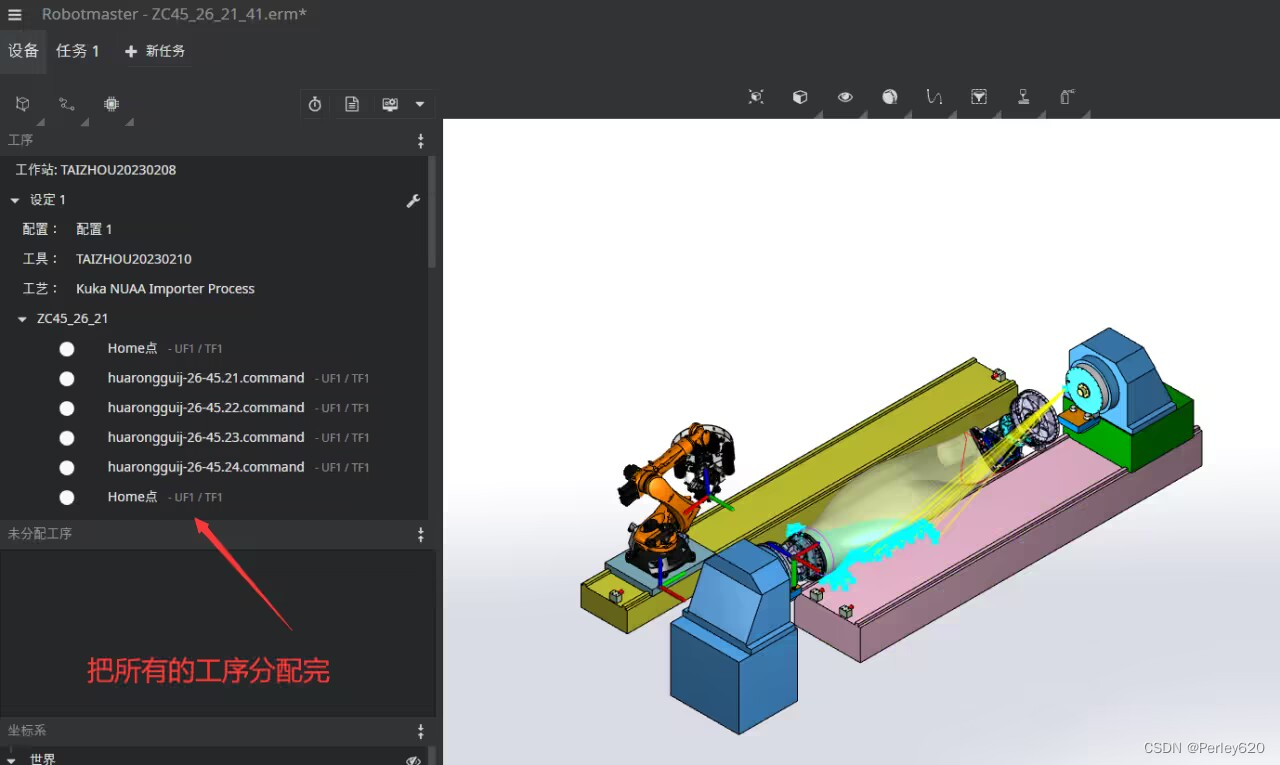
3.进行工序分配
分配工序到每一个子程序中,这里有几个子程序,后面就会根据其中的工序生成代码文件

分配完所有的工序
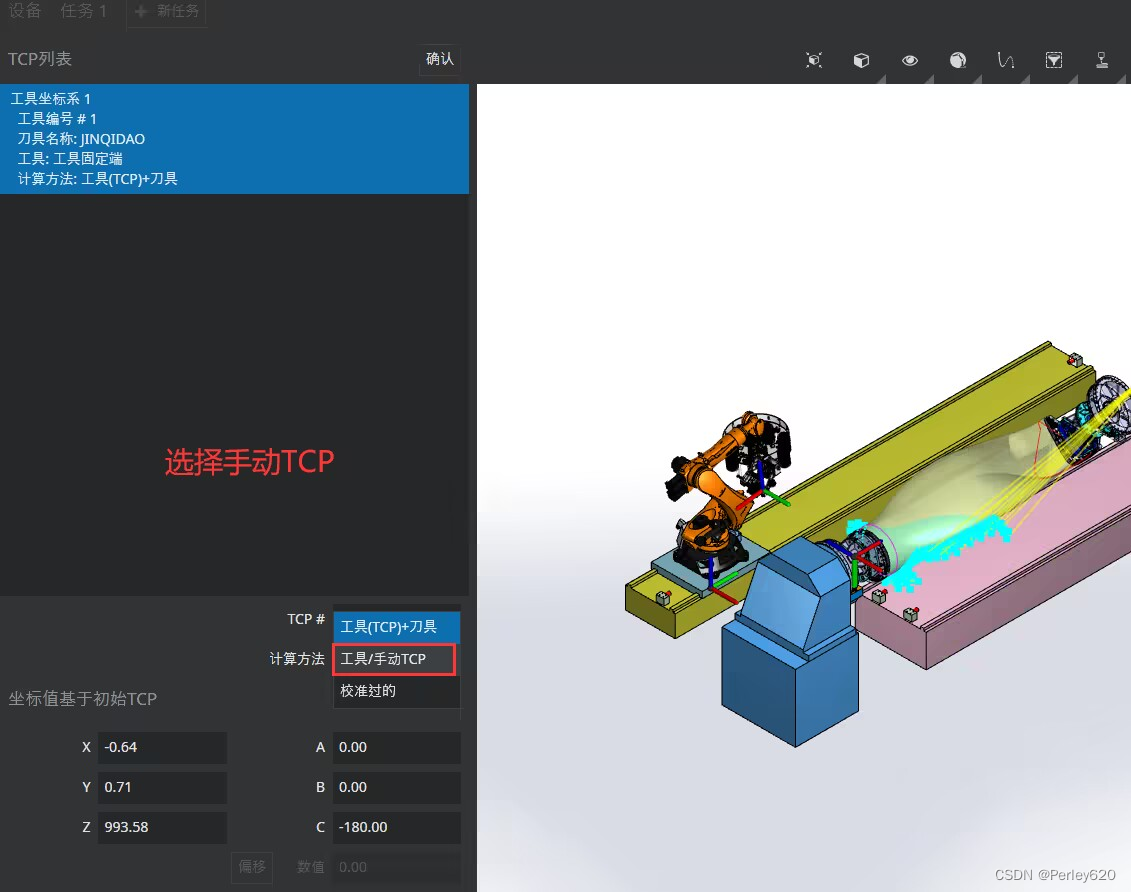
4.设置TCP
接下来就是进行参数的设置
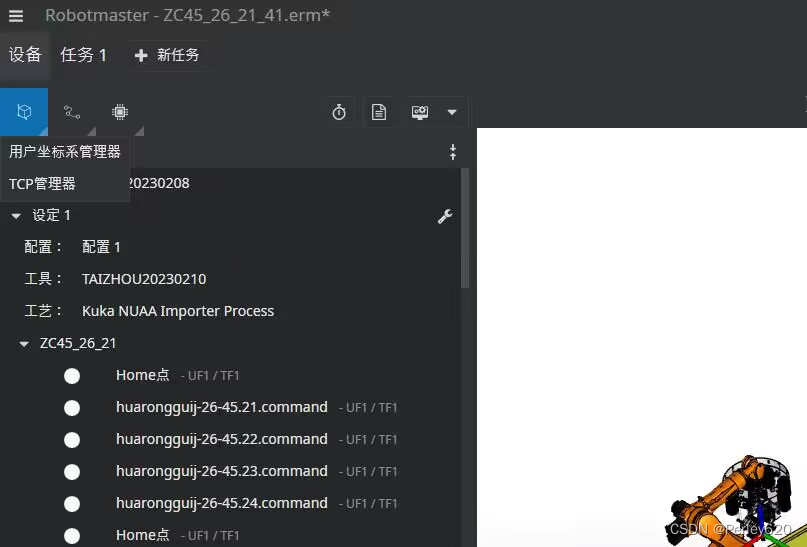
选择TCP列表
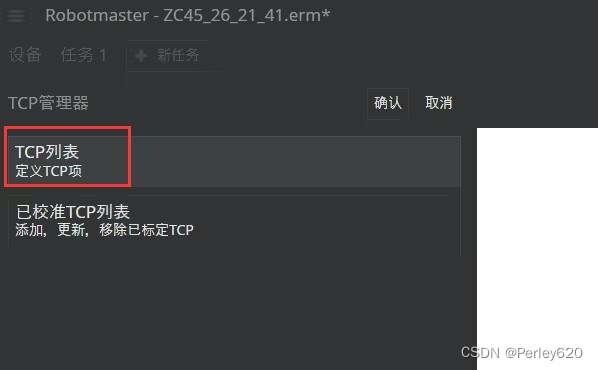
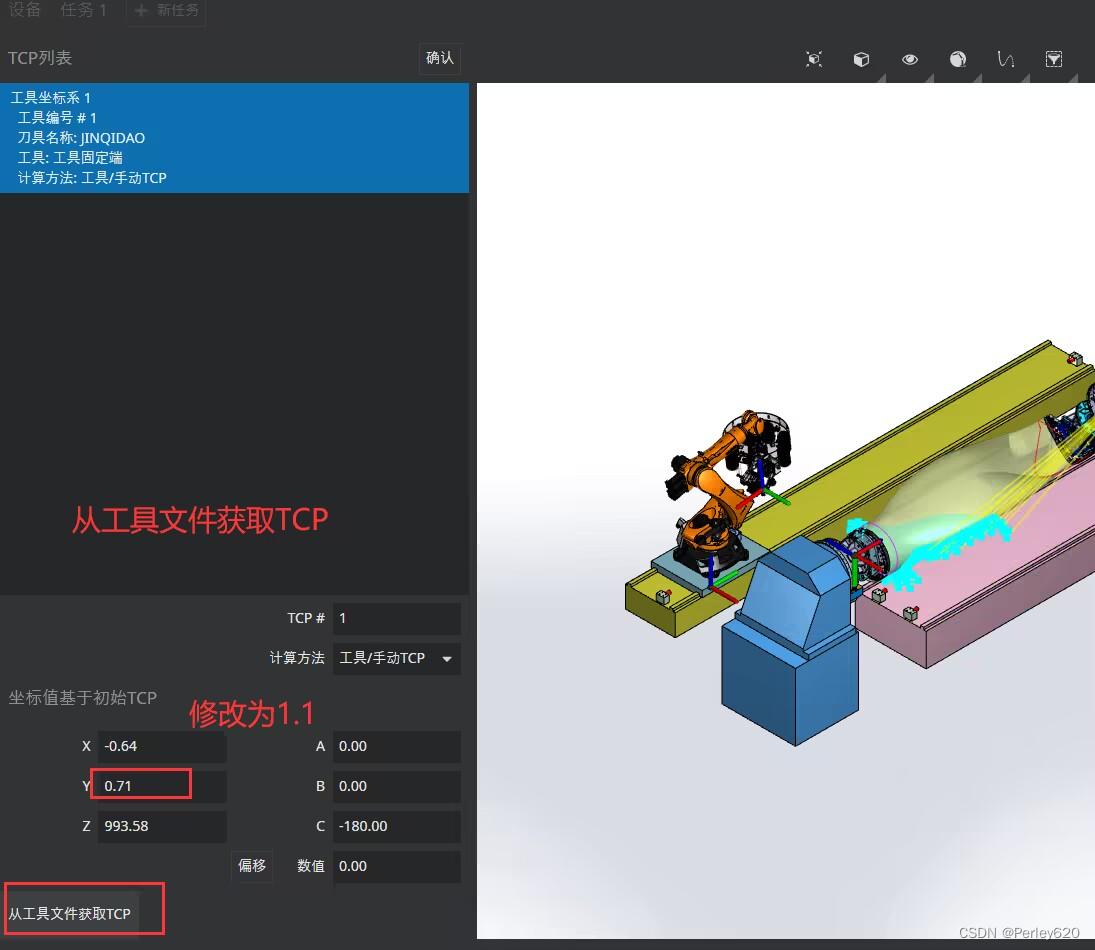
选择手动TCP
从文件获取TCP
5.设置工作站
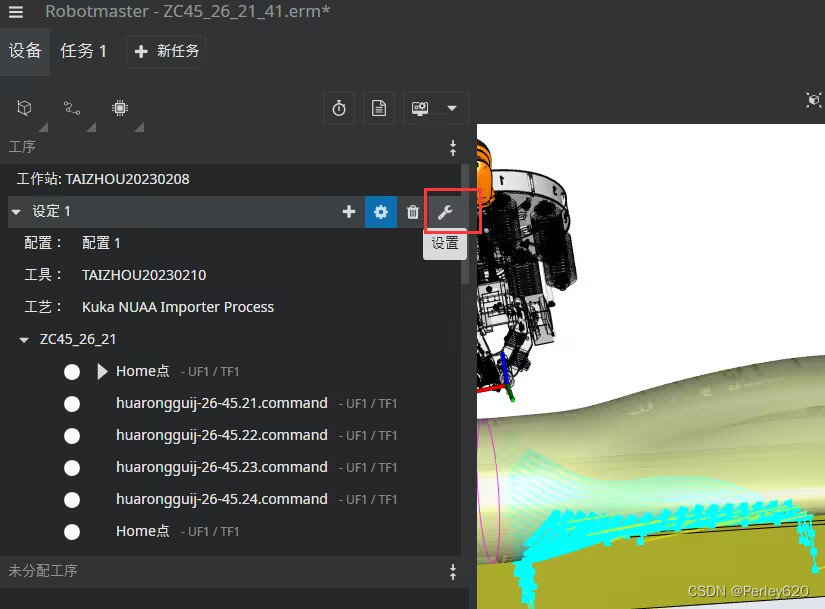
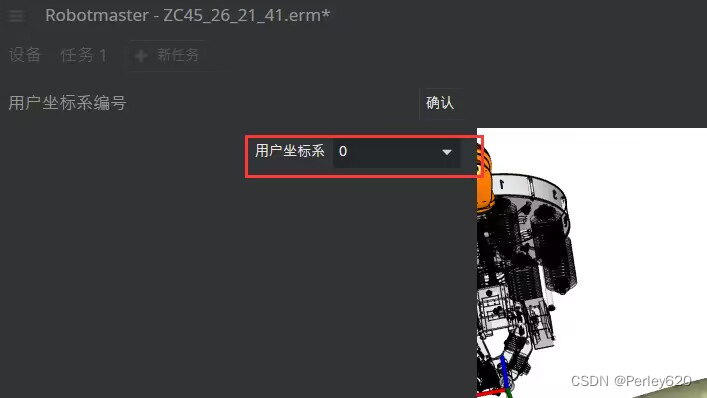
设置用户坐标系编号

选择用户坐标系编号为0
6.工序整体导入配置
如果是0度,要设置成无偏移,其余情况设置成压辊5度

7.进行计算
点击计算按钮,进行仿真
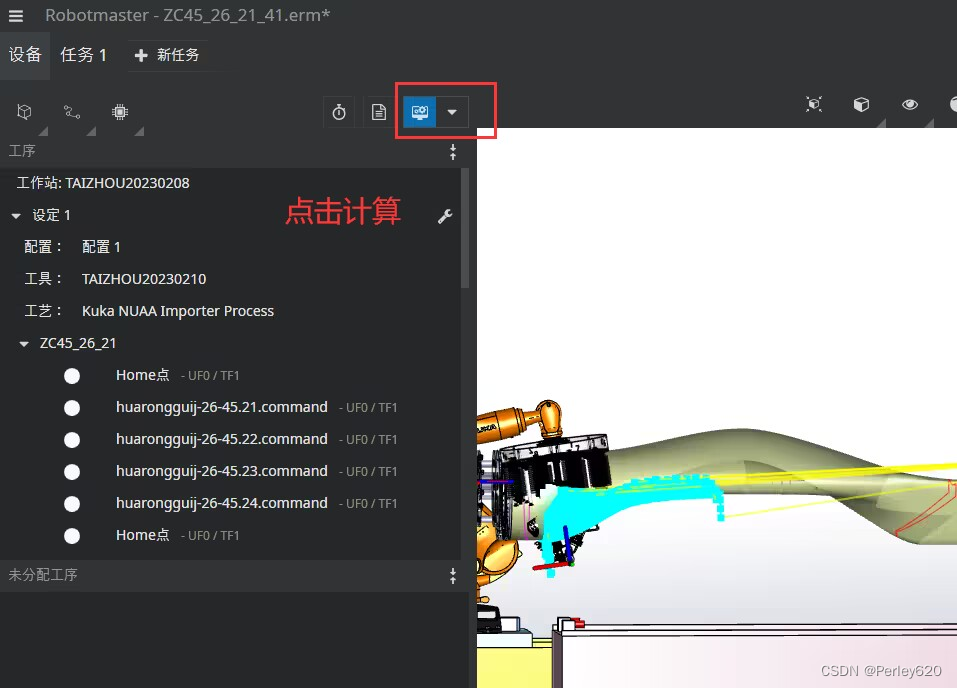
需要保证仿真出来的轨迹没有问题:
1.不能出现干涉;
2.机器人可达,不能出现限位;
总结
RobotMaster的操作流程,从导入工序到生产轨迹。




)




)
)
)



(1/3))
)


