Pytorch从零开始实战——ResNet与DenseNet探索
本系列来源于365天深度学习训练营
原作者K同学
文章目录
- Pytorch从零开始实战——ResNet与DenseNet探索
- 环境准备
- 数据集
- 模型选择
- 开始训练
- 可视化
- 总结
环境准备
本文基于Jupyter notebook,使用Python3.8,Pytorch2.0.1+cu118,torchvision0.15.2,需读者自行配置好环境且有一些深度学习理论基础。本次实验的目的是探索ResNet和DenseNet结合。
第一步,导入常用包
import torch
import torch.nn as nn
import matplotlib.pyplot as plt
import torchvision
import torchvision.transforms as transforms
import torchvision.datasets as datasets
import torch.nn.functional as F
import random
from time import time
import numpy as np
import pandas as pd
import datetime
import gc
import os
import copy
import warnings
os.environ['KMP_DUPLICATE_LIB_OK']='True' # 用于避免jupyter环境突然关闭
torch.backends.cudnn.benchmark=True # 用于加速GPU运算的代码
设置随机数种子
torch.manual_seed(428)
torch.cuda.manual_seed(428)
torch.cuda.manual_seed_all(428)
random.seed(428)
np.random.seed(428)
检查设备对象
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
device, torch.cuda.device_count() # # (device(type='cuda'), 2)
数据集
本次数据集是使用鸟的图片,分别有四种类别的鸟,根据鸟的类别名称存放在不同的文件夹中。
使用pathlib查看类别
import pathlib
data_dir = './data/bird_photos/'
data_dir = pathlib.Path(data_dir) # 转成pathlib.Path对象
data_paths = list(data_dir.glob('*'))
classNames = [str(path).split("/")[2] for path in data_paths]
classNames # ['Black Throated Bushtiti', 'Cockatoo', 'Black Skimmer', 'Bananaquit']
使用transforms对数据集进行统一处理,并且根据文件夹名映射对应标签
all_transforms = transforms.Compose([transforms.Resize([224, 224]),transforms.ToTensor(),transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]) # 标准化
])total_data = datasets.ImageFolder("./data/bird_photos/", transform=all_transforms)
total_data.class_to_idx# {'Bananaquit': 0,# 'Black Skimmer': 1,# 'Black Throated Bushtiti': 2,# 'Cockatoo': 3}
随机查看5张图片
def plotsample(data):fig, axs = plt.subplots(1, 5, figsize=(10, 10)) #建立子图for i in range(5):num = random.randint(0, len(data) - 1) #首先选取随机数,随机选取五次#抽取数据中对应的图像对象,make_grid函数可将任意格式的图像的通道数升为3,而不改变图像原始的数据#而展示图像用的imshow函数最常见的输入格式也是3通道npimg = torchvision.utils.make_grid(data[num][0]).numpy()nplabel = data[num][1] #提取标签 #将图像由(3, weight, height)转化为(weight, height, 3),并放入imshow函数中读取axs[i].imshow(np.transpose(npimg, (1, 2, 0))) axs[i].set_title(nplabel) #给每个子图加上标签axs[i].axis("off") #消除每个子图的坐标轴plotsample(total_data)
根据8比2划分数据集和测试集,并且利用DataLoader划分批次和随机打乱
train_size = int(0.8 * len(total_data))
test_size = len(total_data) - train_size
train_ds, test_ds = torch.utils.data.random_split(total_data, [train_size, test_size])batch_size = 32
train_dl = torch.utils.data.DataLoader(train_ds,batch_size=batch_size,shuffle=True,)
test_dl = torch.utils.data.DataLoader(test_ds,batch_size=batch_size,shuffle=True,)len(train_dl.dataset), len(test_dl.dataset) # (452, 113)
模型选择
本次模型采用模型集成,也就是说将一个输入特征分别送到两个不同的模型中去学习,到最后将输出特征融合后进行分类,每个模型可能对数据集的不同方面有更强的学习能力,因此通过集成,可以期望获得更全面、更强大的特征表示。
具体而言,本次实验使用了一个 DenseNet 和一个 ResNet,它们在网络结构和特征提取方面有所不同。DenseNet 使用密集连接的结构,充分利用了每一层的特征,而 ResNet 使用残差连接,有助于解决梯度消失问题,使得网络更易训练。
先建立ResNet模型,首先实现Block块,首先进行预激活层,包括标准化和ReLu激活函数,接着进行shortcut操作,如果conv_shortcut为True,会使用一个1x1卷积层进行变换,否则,如果stride为1,则进行恒等映射,否则使用1x1的最大池化。随后经过三个卷积层。在forward方法中,输入 x 经过预激活层,然后进行三个卷积操作,最后将shortcut和经过卷积的结果相加。这种结构使得梯度更容易反向传播,从而有助于训练深层网络。
class Block2(nn.Module):def __init__(self, in_channels, filters, kernel_size=3, stride=1, conv_shortcut=False):super(Block2, self).__init__()self.preact = nn.Sequential(nn.BatchNorm2d(in_channels),nn.ReLU())if conv_shortcut:self.shortcut = nn.Conv2d(in_channels, 4 * filters, kernel_size=1, stride=stride)else:if stride == 1:self.shortcut = nn.Identity()else: self.shortcut = nn.MaxPool2d(1, stride=stride)self.conv1 = nn.Sequential(nn.Conv2d(in_channels, filters, kernel_size=1, stride=1, bias=False),nn.BatchNorm2d(filters),nn.ReLU())self.conv2 = nn.Sequential(nn.ZeroPad2d(padding=(1, 1, 1, 1)),nn.Conv2d(filters, filters, kernel_size=kernel_size, stride=stride, bias=False),nn.BatchNorm2d(filters),nn.ReLU())self.conv3 = nn.Conv2d(filters, 4 * filters, kernel_size=1)def forward(self, x):preact = self.preact(x)shortcut = self.shortcut(preact)x = self.conv1(preact)x = self.conv2(x)x = self.conv3(x)out = shortcut + xreturn out
下面实现堆叠块,通过传入不同的参数去调用Block块,其中[Block2(4 * filters, filters) for i in range(0, blocks)],使用 Python 中的列表解析创建了 blocks 个残差块。这些残差块的输入通道数为 4 * filters,以匹配前一个残差块的输出通道数。
class Stack2(nn.Module):def __init__(self, in_channels, filters, blocks, stride1=2):super(Stack2, self).__init__()self.blocks = nn.Sequential(Block2(in_channels, filters, conv_shortcut=True),*[Block2(4 * filters, filters) for i in range(0, blocks)],Block2(4 * filters, filters, stride=stride1))def forward(self, x):return self.blocks(x)
下面实现ResNet网络主体,去掉全连接层。
class ResNetPart(nn.Module):def __init__(self, include_top=True, preact=True, num_classes=1000):super().__init__()self.conv1 = nn.Sequential(nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False),nn.BatchNorm2d(64),nn.ReLU())self.pool1 = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)self.conv2 = Stack2(64, 64, 3)self.conv3 = Stack2(256, 128, 4)self.conv4 = Stack2(512, 256, 6)self.conv5 = Stack2(1024, 512, 3, stride1=1)self.post = nn.Sequential(nn.BatchNorm2d(2048),nn.ReLU())self.include_top = include_topif include_top:self.avg_pool = nn.AdaptiveAvgPool2d(1)def forward(self, x):x = self.conv1(x)x = self.pool1(x)x = self.conv2(x)x = self.conv3(x)x = self.conv4(x)x = self.conv5(x)x = self.post(x)if self.include_top:x = self.avg_pool(x)x = torch.flatten(x, 1)return x
下面实现DenseNet部分。首先对DenseLayer类定义,本次实验使用add_module函数,默认是用于向类中添加一个子模块,第一个参数为模块名,第二个参数为模块实例,其实相当于加到父类的nn.Sequential里面,所以调用的时候使用super().forward(x),这段的核心是将输入 x 与新特征 t 进行通道维度上的连接,完成密集连接。
class DenseLayer(nn.Sequential):def __init__(self, num_input_features, growth_rate, bn_size, drop_rate):super().__init__()self.add_module("norm1", nn.BatchNorm2d(num_input_features))self.add_module("relu1", nn.ReLU(inplace=True))self.add_module("conv1", nn.Conv2d(num_input_features, bn_size * growth_rate, kernel_size=1, stride=1, bias=False))self.add_module("norm2", nn.BatchNorm2d(bn_size * growth_rate))self.add_module("relu2", nn.ReLU(inplace=True))self.add_module("conv2", nn.Conv2d(bn_size*growth_rate, growth_rate, kernel_size=3, stride=1, padding=1, bias=False))self.drop_rate = drop_ratedef forward(self, x):t = super().forward(x)if self.drop_rate > 0:t = F.dropout(t, p=self.drop_rate, training=self.training)return torch.cat([x, t], 1)
下面是DenseBlock的实现,通过循环创建了多个DenseLayer。其中的 num_input_features + i * growth_rate 用于指定输入通道的数量,确保每个DenseLayer的输入通道数逐渐增加。将新创建的DenseLayer添加为 DenseBlock 的子模块。循环结束后,DenseBlock 就包含了多个DenseLayer,每个DenseLayer都具有逐渐增加的输入通道数量。
class DenseBlock(nn.Sequential):def __init__(self, num_layers, num_input_features, bn_size, growth_rate, drop_rate):super().__init__()for i in range(num_layers):layer = DenseLayer(num_input_features + i * growth_rate, growth_rate, bn_size, drop_rate)self.add_module("denselayer%d" % (i + 1), layer)
下面是Transition,实现过渡的功能,是在块之间降低通道数量和空间维度。
class Transition(nn.Sequential):def __init__(self, num_input_feature, num_output_features):super().__init__()self.add_module("norm", nn.BatchNorm2d(num_input_feature))self.add_module("relu", nn.ReLU(inplace=True))self.add_module("conv", nn.Conv2d(num_input_feature, num_output_features, kernel_size=1, stride=1, bias=False))self.add_module("pool", nn.AvgPool2d(2, stride=2))
实现深度学习网络主体,将不同的输出特征进行融合,完成分类。
from collections import OrderedDict
class Model(nn.Module):def __init__(self, growth_rate=32, block_config=(6, 12, 24, 16), num_init_features=64,bn_size=4, compression_rate=0.5, drop_rate=0, num_classes=1000):super().__init__()self.features = nn.Sequential(OrderedDict([("conv0", nn.Conv2d(3, num_init_features, kernel_size=7, stride=2, padding=3, bias=False)),("norm0", nn.BatchNorm2d(num_init_features)),("relu0", nn.ReLU(inplace=True)),("pool0", nn.MaxPool2d(3, stride=2, padding=1))]))num_features = num_init_featuresfor i, num_layers in enumerate(block_config):block = DenseBlock(num_layers, num_features, bn_size, growth_rate, drop_rate)self.features.add_module("denseblock%d" % (i + 1), block)num_features += num_layers * growth_rateif i != len(block_config) - 1:transition = Transition(num_features, int(num_features * compression_rate))self.features.add_module("transition%d" % (i + 1), transition)num_features = int(num_features * compression_rate)self.features.add_module("norm5", nn.BatchNorm2d(num_features))self.features.add_module("relu5", nn.ReLU(inplace=True))self.classifier = nn.Linear(num_features + 2048, num_classes)for m in self.modules():if isinstance(m, nn.Conv2d):nn.init.kaiming_normal_(m.weight)elif isinstance(m, nn.BatchNorm2d):nn.init.constant_(m.bias, 0)nn.init.constant_(m.weight, 1)elif isinstance(m, nn.Linear):nn.init.constant_(m.bias, 0)self.part = ResNetPart()def forward(self, x):t = self.part(x)features = self.features(x)out = F.avg_pool2d(features, 7, stride=1).view(features.size(0), -1)out = torch.cat([out, t], dim=1) out = self.classifier(out)return out
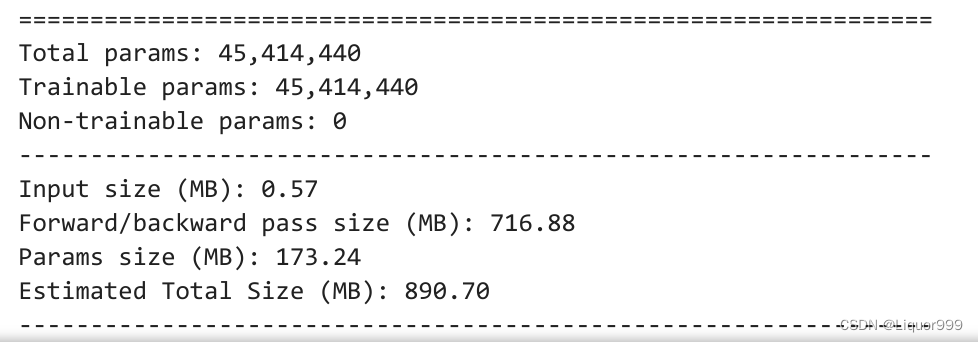
使用summary查看网络
开始训练
定义训练函数
def train(dataloader, model, loss_fn, opt):size = len(dataloader.dataset)num_batches = len(dataloader)train_acc, train_loss = 0, 0for X, y in dataloader:X, y = X.to(device), y.to(device)pred = model(X)loss = loss_fn(pred, y)opt.zero_grad()loss.backward()opt.step()train_acc += (pred.argmax(1) == y).type(torch.float).sum().item()train_loss += loss.item()train_acc /= sizetrain_loss /= num_batchesreturn train_acc, train_loss
定义测试函数
def test(dataloader, model, loss_fn):size = len(dataloader.dataset)num_batches = len(dataloader)test_acc, test_loss = 0, 0with torch.no_grad():for X, y in dataloader:X, y = X.to(device), y.to(device)pred = model(X)loss = loss_fn(pred, y)test_acc += (pred.argmax(1) == y).type(torch.float).sum().item()test_loss += loss.item()test_acc /= sizetest_loss /= num_batchesreturn test_acc, test_loss
定义学习率、损失函数、优化算法
loss_fn = nn.CrossEntropyLoss()
learn_rate = 0.0002
opt = torch.optim.Adam(model.parameters(), lr=learn_rate)
开始训练,epoch设置为30
import time
epochs = 20
train_loss = []
train_acc = []
test_loss = []
test_acc = []T1 = time.time()best_acc = 0
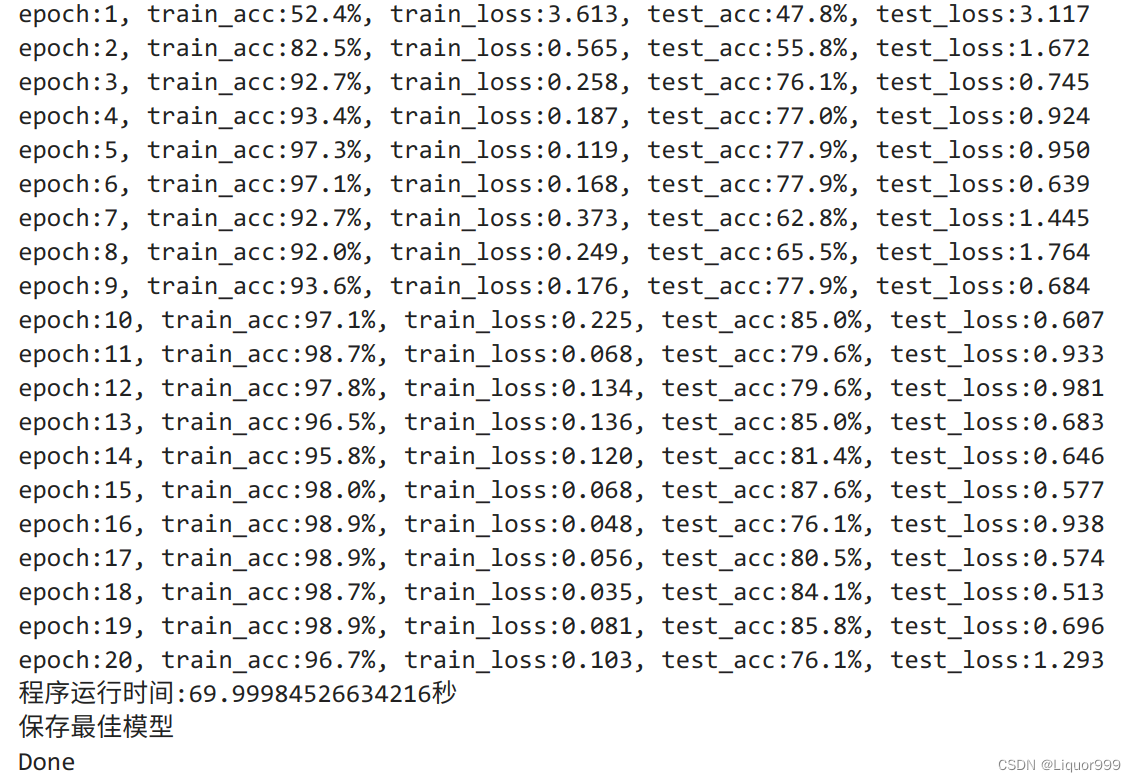
best_model = 0for epoch in range(epochs):model.train()epoch_train_acc, epoch_train_loss = train(train_dl, model, loss_fn, opt)model.eval() # 确保模型不会进行训练操作epoch_test_acc, epoch_test_loss = test(test_dl, model, loss_fn)if epoch_test_acc > best_acc:best_acc = epoch_test_accbest_model = copy.deepcopy(model)train_acc.append(epoch_train_acc)train_loss.append(epoch_train_loss)test_acc.append(epoch_test_acc)test_loss.append(epoch_test_loss)print("epoch:%d, train_acc:%.1f%%, train_loss:%.3f, test_acc:%.1f%%, test_loss:%.3f"% (epoch + 1, epoch_train_acc * 100, epoch_train_loss, epoch_test_acc * 100, epoch_test_loss))T2 = time.time()
print('程序运行时间:%s秒' % (T2 - T1))PATH = './best_model.pth' # 保存的参数文件名
if best_model is not None:torch.save(best_model.state_dict(), PATH)print('保存最佳模型')
print("Done")
由于数据量小,所以略微有些过拟合。
可视化
可视化训练过程和测试过程
import warnings
warnings.filterwarnings("ignore") #忽略警告信息
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号
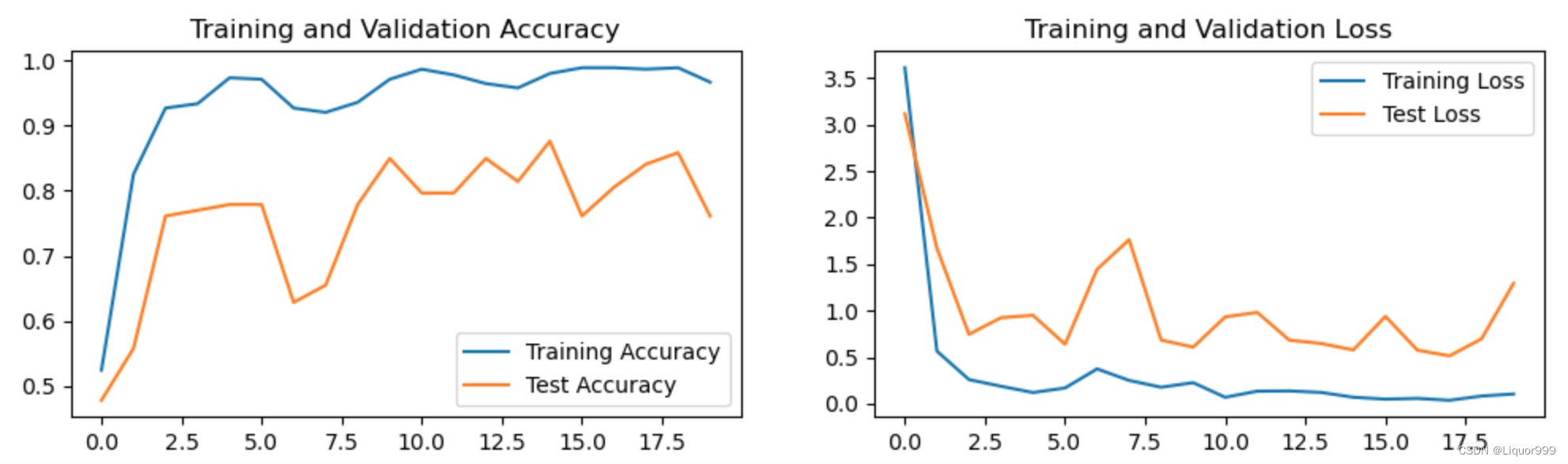
plt.rcParams['figure.dpi'] = 100 #分辨率epochs_range = range(epochs)plt.figure(figsize=(12, 3))
plt.subplot(1, 2, 1)plt.plot(epochs_range, train_acc, label='Training Accuracy')
plt.plot(epochs_range, test_acc, label='Test Accuracy')
plt.legend(loc='lower right')
plt.title('Training and Validation Accuracy')plt.subplot(1, 2, 2)
plt.plot(epochs_range, train_loss, label='Training Loss')
plt.plot(epochs_range, test_loss, label='Test Loss')
plt.legend(loc='upper right')
plt.title('Training and Validation Loss')
plt.show()
总结
由于作者水平有限,所以本次模型之间的结合探索采用模型集成,这其中的优势有:1.每个模型通过不同的方式学习数据的表示,将它们集成可以得到更全面、更丰富的特征表示。2.不同的模型可能对数据集中的不同样本和模式有更好的泛化能力,集成可以减少过拟合的风险。这样的模型可以提供更强的鲁棒性,但一定有很多更好的结合方式。



![【C++入门到精通】 线程库 | thread类 C++11 [ C++入门 ]](http://pic.xiahunao.cn/【C++入门到精通】 线程库 | thread类 C++11 [ C++入门 ])




)

)


)
![[论文阅读]Multimodal Virtual Point 3D Detection](http://pic.xiahunao.cn/[论文阅读]Multimodal Virtual Point 3D Detection)




